 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mid-level Planning System for Object Reorientation
Aug 10, 2016
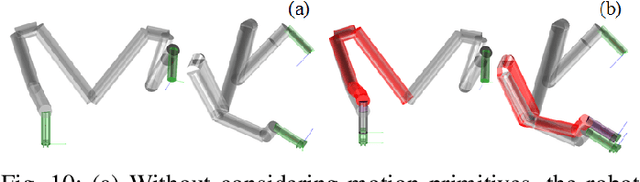

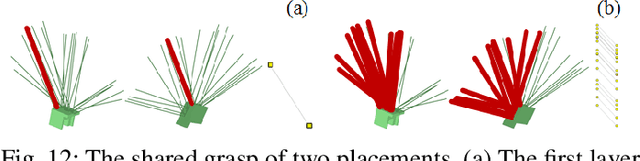
This paper presents a mid-level planning system for object reorientation. It includes a grasp planner, a placement planner, and a regrasp sequence solver. Given the initial and goal poses of an object, the mid-level planning system finds a sequence of hand configurations that reorient the object from the initial to the goal. This mid-level planning system is open to low-level motion planning algorithm by providing two end-effector poses as the input. It is also open to high-level symbolic planners by providing interface functions like placing an object to a given position at a given rotation. The planning system is demonstrated with several simulation examples and real-robot executions using a Kawada Hiro robot and Robotiq 85 grippers.
Teaching Robots to Do Object Assembly using Multi-modal 3D Vision
Jan 26, 2016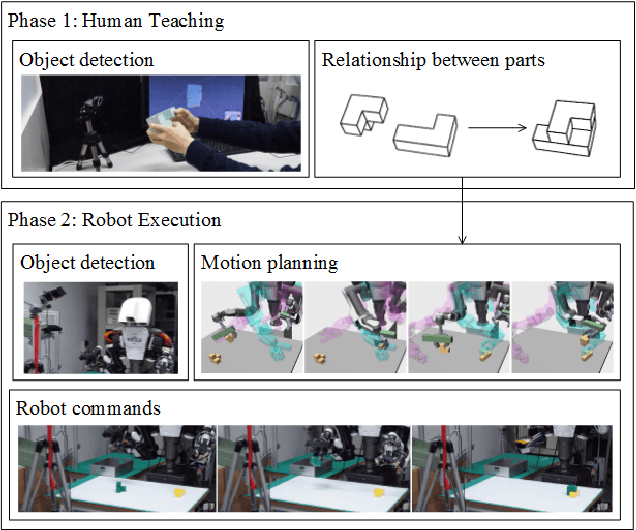

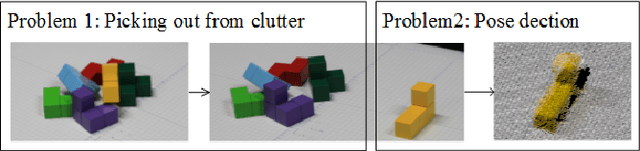

The motivation of this paper is to develop a smart system using multi-modal vision for next-generation mechanical assembly. It includes two phases where in the first phase human beings teach the assembly structure to a robot and in the second phase the robot finds objects and grasps and assembles them using AI planning. The crucial part of the system is the precision of 3D visual detection and the paper presents multi-modal approaches to meet the requirements: AR markers are used in the teaching phase since human beings can actively control the process. Point cloud matching and geometric constraints are used in the robot execution phase to avoid unexpected noises. Experiments are performed to examine the precision and correctness of the approaches. The study is practical: The developed approaches are integrated with graph model-based motion planning, implemented on an industrial robots and applicable to real-world scenarios.