 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsistent Zero-shot 3D Texture Synthesis Using Geometry-aware Diffusion and Temporal Video Models
Jun 26, 2025



Current texture synthesis methods, which generate textures from fixed viewpoints, suffer from inconsistencies due to the lack of global context and geometric understanding. Meanwhile, recent advancements in video generation models have demonstrated remarkable success in achieving temporally consistent videos. In this paper, we introduce VideoTex, a novel framework for seamless texture synthesis that leverages video generation models to address both spatial and temporal inconsistencies in 3D textures. Our approach incorporates geometry-aware conditions, enabling precise utilization of 3D mesh structures. Additionally, we propose a structure-wise UV diffusion strategy, which enhances the generation of occluded areas by preserving semantic information, resulting in smoother and more coherent textures. VideoTex not only achieves smoother transitions across UV boundaries but also ensures high-quality, temporally stable textures across video frames. Extensive experiments demonstrate that VideoTex outperforms existing methods in texture fidelity, seam blending, and stability, paving the way for dynamic real-time applications that demand both visual quality and temporal coherence.
CaPa: Carve-n-Paint Synthesis for Efficient 4K Textured Mesh Generation
Jan 16, 2025The synthesis of high-quality 3D assets from textual or visual inputs has become a central objective in modern generative modeling. Despite the proliferation of 3D generation algorithms, they frequently grapple with challenges such as multi-view inconsistency, slow generation times, low fidelity, and surface reconstruction problems. While some studies have addressed some of these issues, a comprehensive solution remains elusive. In this paper, we introduce \textbf{CaPa}, a carve-and-paint framework that generates high-fidelity 3D assets efficiently. CaPa employs a two-stage process, decoupling geometry generation from texture synthesis. Initially, a 3D latent diffusion model generates geometry guided by multi-view inputs, ensuring structural consistency across perspectives. Subsequently, leveraging a novel, model-agnostic Spatially Decoupled Attention, the framework synthesizes high-resolution textures (up to 4K) for a given geometry. Furthermore, we propose a 3D-aware occlusion inpainting algorithm that fills untextured regions, resulting in cohesive results across the entire model. This pipeline generates high-quality 3D assets in less than 30 seconds, providing ready-to-use outputs for commercial applications. Experimental results demonstrate that CaPa excels in both texture fidelity and geometric stability, establishing a new standard for practical, scalable 3D asset generation.
RoCoTex: A Robust Method for Consistent Texture Synthesis with Diffusion Models
Sep 30, 2024



Text-to-texture generation has recently attracted increasing attention, but existing methods often suffer from the problems of view inconsistencies, apparent seams, and misalignment between textures and the underlying mesh. In this paper, we propose a robust text-to-texture method for generating consistent and seamless textures that are well aligned with the mesh. Our method leverages state-of-the-art 2D diffusion models, including SDXL and multiple ControlNets, to capture structural features and intricate details in the generated textures. The method also employs a symmetrical view synthesis strategy combined with regional prompts for enhancing view consistency. Additionally, it introduces novel texture blending and soft-inpainting techniques, which significantly reduce the seam regions. Extensive experiments demonstrate that our method outperforms existing state-of-the-art methods.
Dynamic Anchor Selection and Real-Time Pose Prediction for Ultra-wideband Tagless Gate
Feb 22, 2024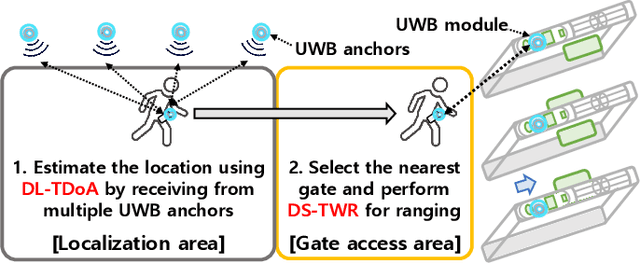
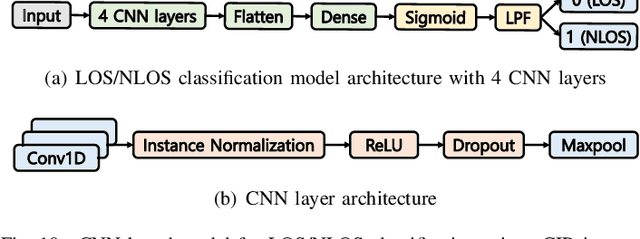
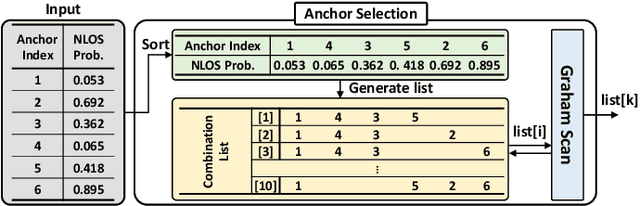
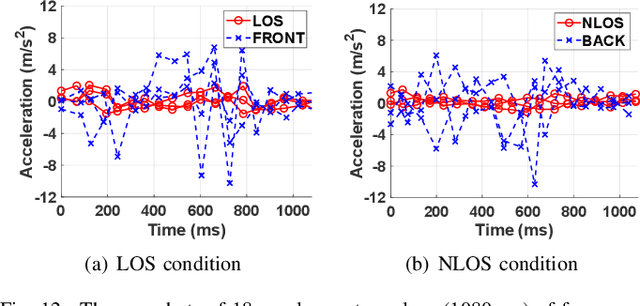
Ultra-wideband (UWB) is emerging as a promising solution that can realize proximity services, such as UWB tagless gate (UTG), thanks to centimeter-level localization accuracy based on two different ranging methods such as downlink time-difference of arrival (DL-TDoA) and double-sided two-way ranging (DS-TWR). The UTG is a UWB-based proximity service that provides a seamless gate pass system without requiring real-time mobile device (MD) tapping. The location of MD is calculated using DL-TDoA, and the MD communicates with the nearest UTG using DS-TWR to open the gate. Therefore, the knowledge about the exact location of MD is the main challenge of UTG, and hence we provide the solutions for both DL-TDoA and DS-TWR. In this paper, we propose dynamic anchor selection for extremely accurate DL-TDoA localization and pose prediction for DS-TWR, called DynaPose. The pose is defined as the actual location of MD on the human body, which affects the localization accuracy. DynaPose is based on line-of-sight (LOS) and non-LOS (NLOS) classification using deep learning for anchor selection and pose prediction. Deep learning models use the UWB channel impulse response and the inertial measurement unit embedded in the smartphone. DynaPose is implemented on Samsung Galaxy Note20 Ultra and Qorvo UWB board to show the feasibility and applicability. DynaPose achieves a LOS/NLOS classification accuracy of 0.984, 62% higher DL-TDoA localization accuracy, and ultimately detects four different poses with an accuracy of 0.961 in real-time.
Power-Efficient Indoor Localization Using Adaptive Channel-aware Ultra-wideband DL-TDOA
Feb 16, 2024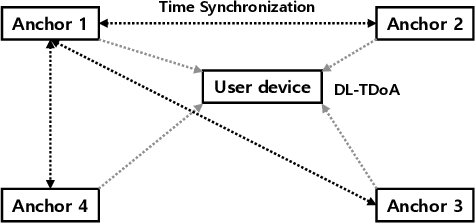
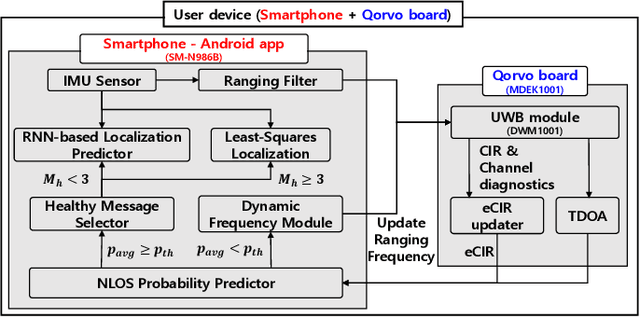
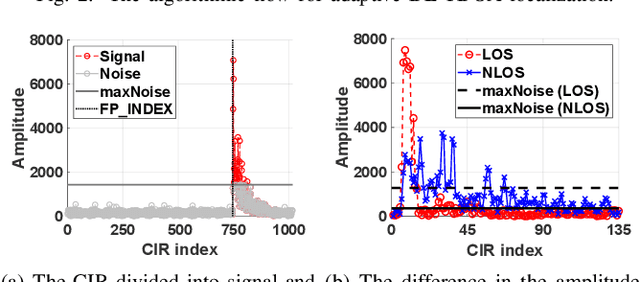
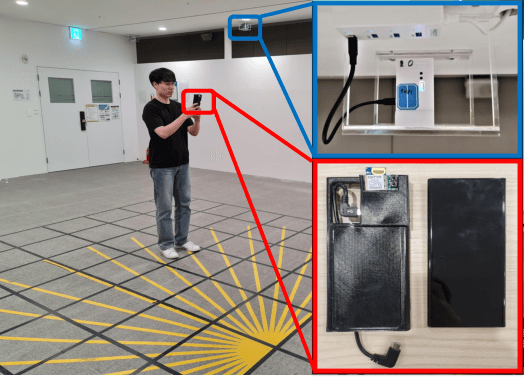
Among the various Ultra-wideband (UWB) ranging methods, the absence of uplink communication or centralized computation makes downlink time-difference-of-arrival (DL-TDOA) localization the most suitable for large-scale industrial deployments. However, temporary or permanent obstacles in the deployment region often lead to non-line-of-sight (NLOS) channel path and signal outage effects, which result in localization errors. Prior research has addressed this problem by increasing the ranging frequency, which leads to a heavy increase in the user device power consumption. It also does not contribute to any increase in localization accuracy under line-of-sight (LOS) conditions. In this paper, we propose and implement a novel low-power channel-aware dynamic frequency DL-TDOA ranging algorithm. It comprises NLOS probability predictor based on a convolutional neural network (CNN), a dynamic ranging frequency control module, and an IMU sensor-based ranging filter. Based on the conducted experiments, we show that the proposed algorithm achieves 50% higher accuracy in NLOS conditions while having 46% lower power consumption in LOS conditions compared to baseline methods from prior research.
Deep Learning-based Real-time Smartphone Pose Detection for Ultra-wideband Tagless Gate
Feb 13, 2024



As commercial interest in proximity services increased, the development of various wireless localization techniques was promoted. In line with this trend, Ultra-wideband (UWB) is emerging as a promising solution that can realize proximity services thanks to centimeter-level localization accuracy. In addition, since the actual location of the mobile device (MD) on the human body, called pose, affects the localization accuracy, poses are also important to provide accurate proximity services, especially for the UWB tagless gate (UTG). In this paper, a real-time pose detector, termed D3, is proposed to estimate the pose of MD when users pass through UTG. D3 is based on line-of-sight (LOS) and non-LOS (NLOS) classification using UWB channel impulse response and utilizes the inertial measurement unit embedded in the smartphone to estimate the pose. D3 is implemented on Samsung Galaxy Note20 Ultra (i.e., SMN986B) and Qorvo UWB board to show the feasibility and applicability. D3 achieved an LOS/NLOS classification accuracy of 0.984, and ultimately detected four different poses of MD with an accuracy of 0.961 in real-time.
Explore, Select, Derive, and Recall: Augmenting LLM with Human-like Memory for Mobile Task Automation
Dec 04, 2023


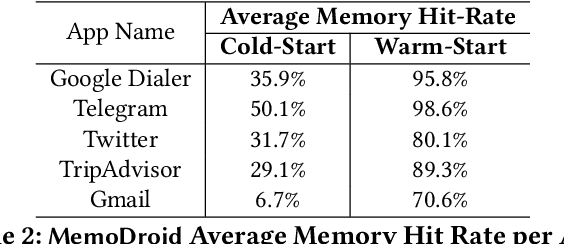
The advent of large language models (LLMs) has opened up new opportunities in the field of mobile task automation. Their superior language understanding and reasoning capabilities allow users to automate complex and repetitive tasks. However, due to the inherent unreliability and high operational cost of LLMs, their practical applicability is quite limited. To address these issues, this paper introduces MemoDroid, an innovative LLM-based mobile task automator enhanced with a unique app memory. MemoDroid emulates the cognitive process of humans interacting with a mobile app -- explore, select, derive, and recall. This approach allows for a more precise and efficient learning of a task's procedure by breaking it down into smaller, modular components that can be re-used, re-arranged, and adapted for various objectives. We implement MemoDroid using online LLMs services (GPT-3.5 and GPT-4) and evaluate its performance on 50 unique mobile tasks across 5 widely used mobile apps. The results indicate that MemoDroid can adapt learned tasks to varying contexts with 100% accuracy and reduces their latency and cost by 69.22% and 77.36% compared to a GPT-4 powered baseline.
Disentangling Options with Hellinger Distance Regularizer
Apr 15, 2019
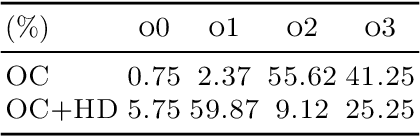
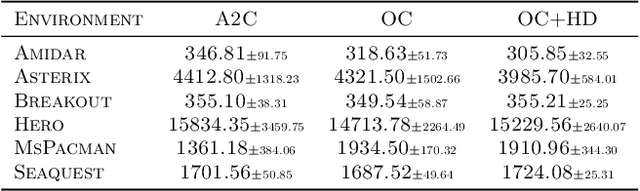
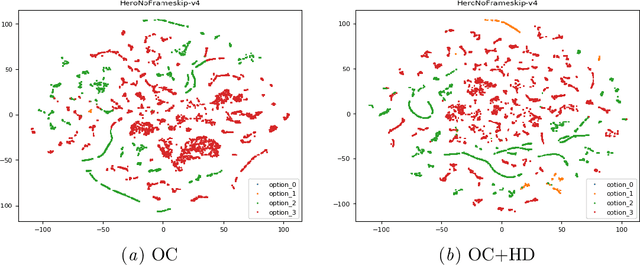
In reinforcement learning (RL), temporal abstraction still remains as an important and unsolved problem. The options framework provided clues to temporal abstraction in the RL, and the option-critic architecture elegantly solved the two problems of finding options and learning RL agents in an end-to-end manner. However, it is necessary to examine whether the options learned through this method play a mutually exclusive role. In this paper, we propose a Hellinger distance regularizer, a method for disentangling options. In addition, we will shed light on various indicators from the statistical point of view to compare with the options learned through the existing option-critic architecture.
Task-oriented Design through Deep Reinforcement Learning
Mar 13, 2019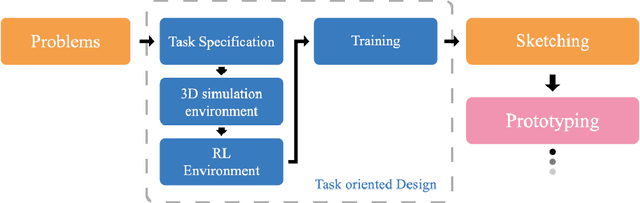
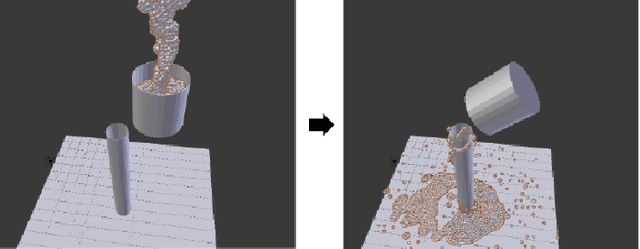
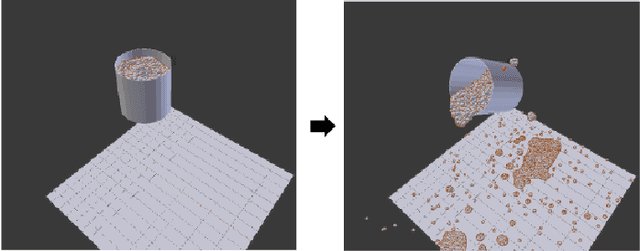
We propose a new low-cost machine-learning-based methodology which assists designers in reducing the gap between the problem and the solution in the design process. Our work applies reinforcement learning (RL) to find the optimal task-oriented design solution through the construction of the design action for each task. For this task-oriented design, the 3D design process in product design is assigned to an action space in Deep RL, and the desired 3D model is obtained by training each design action according to the task. By showing that this method achieves satisfactory design even when applied to a task pursuing multiple goals, we suggest the direction of how machine learning can contribute to the design process. Also, we have validated with product designers that this methodology can assist the creative part in the process of design.
Butterfly Effect: Bidirectional Control of Classification Performance by Small Additive Perturbation
Dec 04, 2017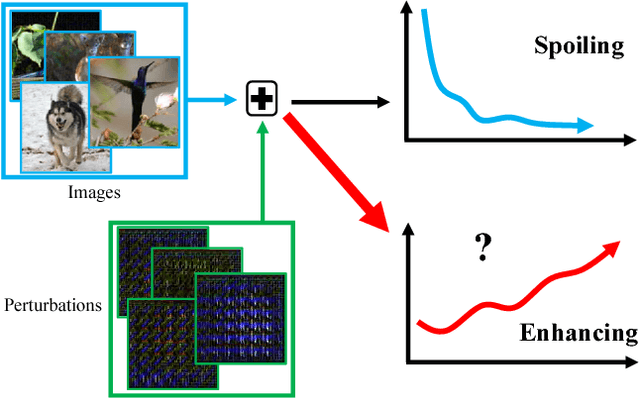
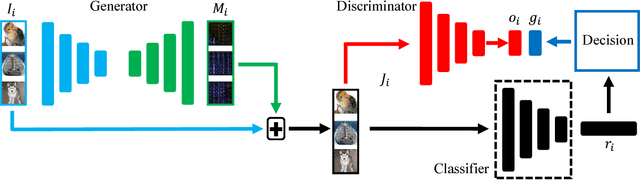
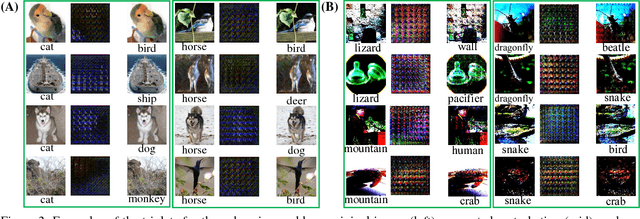
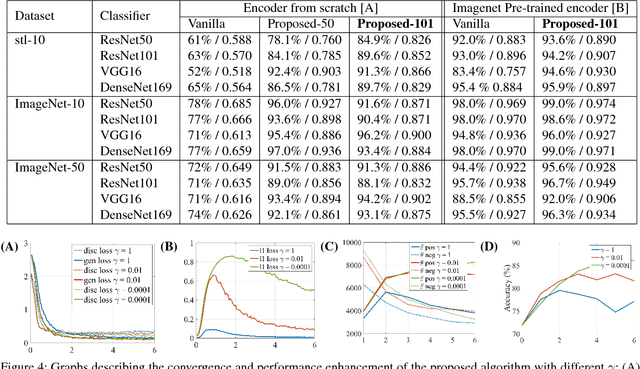
This paper proposes a new algorithm for controlling classification results by generating a small additive perturbation without changing the classifier network. Our work is inspired by existing works generating adversarial perturbation that worsens classification performance. In contrast to the existing methods, our work aims to generate perturbations that can enhance overall classification performance. To solve this performance enhancement problem, we newly propose a perturbation generation network (PGN) influenced by the adversarial learning strategy. In our problem, the information in a large external dataset is summarized by a small additive perturbation, which helps to improve the performance of the classifier trained with the target dataset. In addition to this performance enhancement problem, we show that the proposed PGN can be adopted to solve the classical adversarial problem without utilizing the information on the target classifier. The mentioned characteristics of our method are verified through extensive experiments on publicly available visual datasets.