 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWavelet-based Disentangled Adaptive Normalization for Non-stationary Times Series Forecasting
Jun 06, 2025Forecasting non-stationary time series is a challenging task because their statistical properties often change over time, making it hard for deep models to generalize well. Instance-level normalization techniques can help address shifts in temporal distribution. However, most existing methods overlook the multi-component nature of time series, where different components exhibit distinct non-stationary behaviors. In this paper, we propose Wavelet-based Disentangled Adaptive Normalization (WDAN), a model-agnostic framework designed to address non-stationarity in time series forecasting. WDAN uses discrete wavelet transforms to break down the input into low-frequency trends and high-frequency fluctuations. It then applies tailored normalization strategies to each part. For trend components that exhibit strong non-stationarity, we apply first-order differencing to extract stable features used for predicting normalization parameters. Extensive experiments on multiple benchmarks demonstrate that WDAN consistently improves forecasting accuracy across various backbone model. Code is available at this repository: https://github.com/MonBG/WDAN.
XTraffic: A Dataset Where Traffic Meets Incidents with Explainability and More
Jul 16, 2024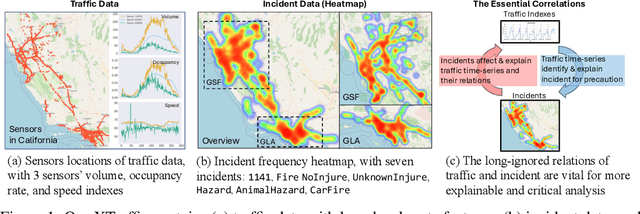

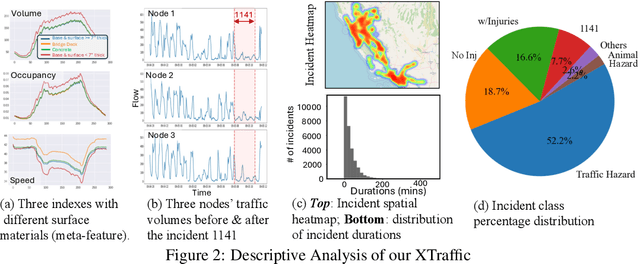
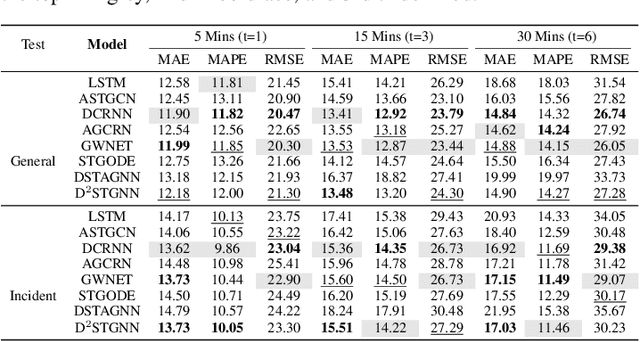
Long-separated research has been conducted on two highly correlated tracks: traffic and incidents. Traffic track witnesses complicating deep learning models, e.g., to push the prediction a few percent more accurate, and the incident track only studies the incidents alone, e.g., to infer the incident risk. We, for the first time, spatiotemporally aligned the two tracks in a large-scale region (16,972 traffic nodes) over the whole year of 2023: our XTraffic dataset includes traffic, i.e., time-series indexes on traffic flow, lane occupancy, and average vehicle speed, and incidents, whose records are spatiotemporally-aligned with traffic data, with seven different incident classes. Additionally, each node includes detailed physical and policy-level meta-attributes of lanes. Our data can revolutionalize traditional traffic-related tasks towards higher interpretability and practice: instead of traditional prediction or classification tasks, we conduct: (1) post-incident traffic forecasting to quantify the impact of different incidents on traffic indexes; (2) incident classification using traffic indexes to determine the incidents types for precautions measures; (3) global causal analysis among the traffic indexes, meta-attributes, and incidents to give high-level guidance of the interrelations of various factors; (4) local causal analysis within road nodes to examine how different incidents affect the road segments' relations. The dataset is available at http://xaitraffic.github.io.
Dynamic Causal Graph Convolutional Network for Traffic Prediction
Jun 12, 2023



Modeling complex spatiotemporal dependencies in correlated traffic series is essential for traffic prediction. While recent works have shown improved prediction performance by using neural networks to extract spatiotemporal correlations, their effectiveness depends on the quality of the graph structures used to represent the spatial topology of the traffic network. In this work, we propose a novel approach for traffic prediction that embeds time-varying dynamic Bayesian network to capture the fine spatiotemporal topology of traffic data. We then use graph convolutional networks to generate traffic forecasts. To enable our method to efficiently model nonlinear traffic propagation patterns, we develop a deep learning-based module as a hyper-network to generate stepwise dynamic causal graphs. Our experimental results on a real traffic dataset demonstrate the superior prediction performance of the proposed method.
Hybrid Channel Based Pedestrian Detection
Jan 30, 2020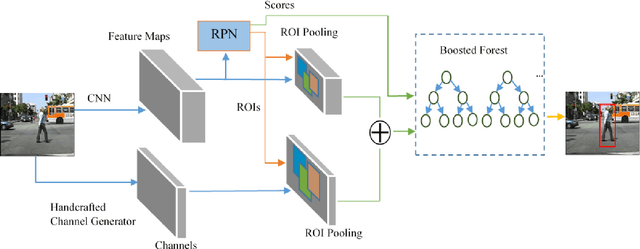
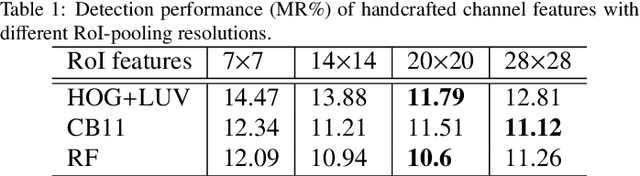

Pedestrian detection has achieved great improvements with the help of Convolutional Neural Networks (CNNs). CNN can learn high-level features from input images, but the insufficient spatial resolution of CNN feature channels (feature maps) may cause a loss of information, which is harmful especially to small instances. In this paper, we propose a new pedestrian detection framework, which extends the successful RPN+BF framework to combine handcrafted features and CNN features. RoI-pooling is used to extract features from both handcrafted channels (e.g. HOG+LUV, CheckerBoards or RotatedFilters) and CNN channels. Since handcrafted channels always have higher spatial resolution than CNN channels, we apply RoI-pooling with larger output resolution to handcrafted channels to keep more detailed information. Our ablation experiments show that the developed handcrafted features can reach better detection accuracy than the CNN features extracted from the VGG-16 net, and a performance gain can be achieved by combining them. Experimental results on Caltech pedestrian dataset with the original annotations and the improved annotations demonstrate the effectiveness of the proposed approach. When using a more advanced RPN in our framework, our approach can be further improved and get competitive results on both benchmarks.