 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarization Reconfigurable Transmit-Receive Beam Alignment with Interpretable Transformer
Aug 17, 2025Recent advancement in next generation reconfigurable antenna and fluid antenna technology has influenced the wireless system with polarization reconfigurable (PR) channels to attract significant attention for promoting beneficial channel condition. We exploit the benefit of PR antennas by integrating such technology into massive multiple-input-multiple-output (MIMO) system. In particular, we aim to jointly design the polarization and beamforming vectors on both transceivers for simultaneous channel reconfiguration and beam alignment, which remarkably enhance the beamforming gain. However, joint optimization over polarization and beamforming vectors without channel state information (CSI) is a challenging task, since depolarization increases the channel dimension; whereas massive MIMO systems typically have low-dimensional pilot measurement from limited radio frequency (RF) chain. This leads to pilot overhead because the transceivers can only observe low-dimensional measurement of the high-dimension channel. This paper pursues the reduction of the pilot overhead in such systems by proposing to employ \emph{interpretable transformer}-based deep learning framework on both transceivers to actively design the polarization and beamforming vectors for pilot stage and transmission stage based on the sequence of accumulated received pilots. Numerical experiments demonstrate the significant performance gain of our proposed framework over the existing non-adaptive and active data-driven methods. Furthermore, we exploit the interpretability of our proposed framework to analyze the learning capabilities of the model.
Hallucination-Aware Generative Pretrained Transformer for Cooperative Aerial Mobility Control
Apr 15, 2025This paper proposes SafeGPT, a two-tiered framework that integrates generative pretrained transformers (GPTs) with reinforcement learning (RL) for efficient and reliable unmanned aerial vehicle (UAV) last-mile deliveries. In the proposed design, a Global GPT module assigns high-level tasks such as sector allocation, while an On-Device GPT manages real-time local route planning. An RL-based safety filter monitors each GPT decision and overrides unsafe actions that could lead to battery depletion or duplicate visits, effectively mitigating hallucinations. Furthermore, a dual replay buffer mechanism helps both the GPT modules and the RL agent refine their strategies over time. Simulation results demonstrate that SafeGPT achieves higher delivery success rates compared to a GPT-only baseline, while substantially reducing battery consumption and travel distance. These findings validate the efficacy of combining GPT-based semantic reasoning with formal safety guarantees, contributing a viable solution for robust and energy-efficient UAV logistics.
Double-Side Polarization and Beamforming Alignment in Polarization Reconfigurable MISO System with Deep Neural Networks
Sep 30, 2024Polarization reconfigurable (PR) antennas enhance spectrum and energy efficiency between next-generation node B(gNB) and user equipment (UE). This is achieved by tuning the polarization vectors for each antenna element based on channel state information (CSI). On the other hand, degree of freedom increased by PR antennas yields a challenge in channel estimation with pilot training overhead. This paper pursues the reduction of pilot overhead, and proposes to employ deep neural networks (DNNs) on both transceiver ends to directly optimize the polarization and beamforming vectors based on the received pilots without the explicit channel estimation. Numerical experiments show that the proposed method significantly outperforms the conventional first-estimate-then-optimize scheme by maximum of 20% in beamforming gain.
Fast Quantum Convolutional Neural Networks for Low-Complexity Object Detection in Autonomous Driving Applications
Dec 28, 2023



Spurred by consistent advances and innovation in deep learning, object detection applications have become prevalent, particularly in autonomous driving that leverages various visual data. As convolutional neural networks (CNNs) are being optimized, the performances and computation speeds of object detection in autonomous driving have been significantly improved. However, due to the exponentially rapid growth in the complexity and scale of data used in object detection, there are limitations in terms of computation speeds while conducting object detection solely with classical computing. Motivated by this, quantum convolution-based object detection (QCOD) is proposed to adopt quantum computing to perform object detection at high speed. The QCOD utilizes our proposed fast quantum convolution that uploads input channel information and re-constructs output channels for achieving reduced computational complexity and thus improving performances. Lastly, the extensive experiments with KITTI autonomous driving object detection dataset verify that the proposed fast quantum convolution and QCOD are successfully operated in real object detection applications.
Quantum Multi-Agent Reinforcement Learning for Autonomous Mobility Cooperation
Aug 03, 2023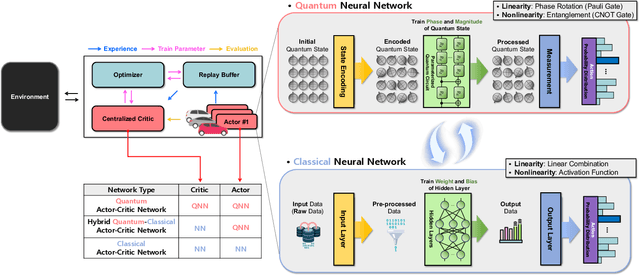
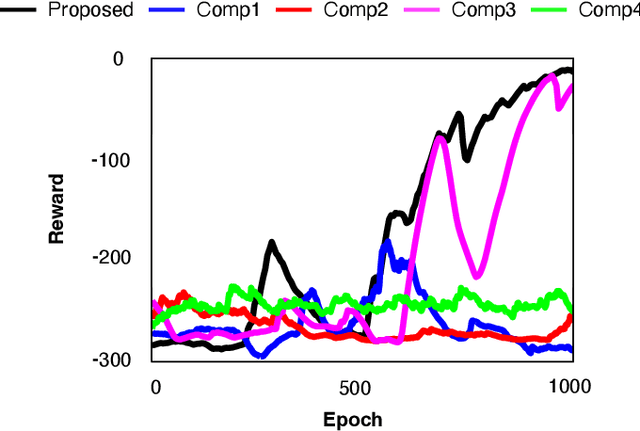
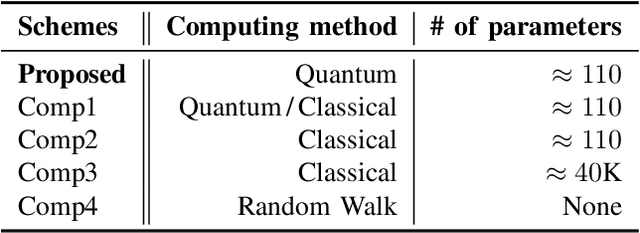
For Industry 4.0 Revolution, cooperative autonomous mobility systems are widely used based on multi-agent reinforcement learning (MARL). However, the MARL-based algorithms suffer from huge parameter utilization and convergence difficulties with many agents. To tackle these problems, a quantum MARL (QMARL) algorithm based on the concept of actor-critic network is proposed, which is beneficial in terms of scalability, to deal with the limitations in the noisy intermediate-scale quantum (NISQ) era. Additionally, our QMARL is also beneficial in terms of efficient parameter utilization and fast convergence due to quantum supremacy. Note that the reward in our QMARL is defined as task precision over computation time in multiple agents, thus, multi-agent cooperation can be realized. For further improvement, an additional technique for scalability is proposed, which is called projection value measure (PVM). Based on PVM, our proposed QMARL can achieve the highest reward, by reducing the action dimension into a logarithmic-scale. Finally, we can conclude that our proposed QMARL with PVM outperforms the other algorithms in terms of efficient parameter utilization, fast convergence, and scalability.
Two Tales of Platoon Intelligence for Autonomous Mobility Control: Enabling Deep Learning Recipes
Jul 19, 2023This paper presents the deep learning-based recent achievements to resolve the problem of autonomous mobility control and efficient resource management of autonomous vehicles and UAVs, i.e., (i) multi-agent reinforcement learning (MARL), and (ii) neural Myerson auction. Representatively, communication network (CommNet), which is one of the most popular MARL algorithms, is introduced to enable multiple agents to take actions in a distributed manner for their shared goals by training all agents' states and actions in a single neural network. Moreover, the neural Myerson auction guarantees trustfulness among multiple agents as well as achieves the optimal revenue of highly dynamic systems. Therefore, we survey the recent studies on autonomous mobility control based on MARL and neural Myerson auction. Furthermore, we emphasize that integration of MARL and neural Myerson auction is expected to be critical for efficient and trustful autonomous mobility services.
Multi-Site Clinical Federated Learning using Recursive and Attentive Models and NVFlare
Jun 28, 2023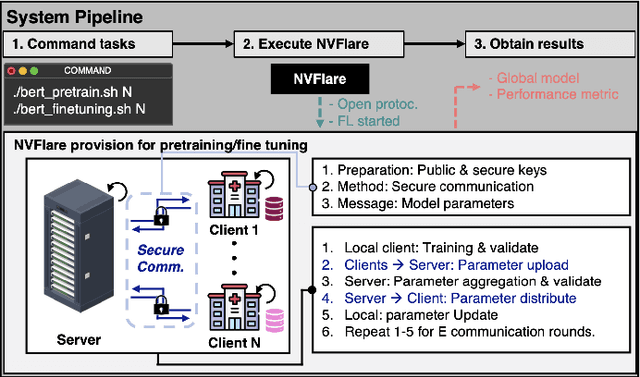
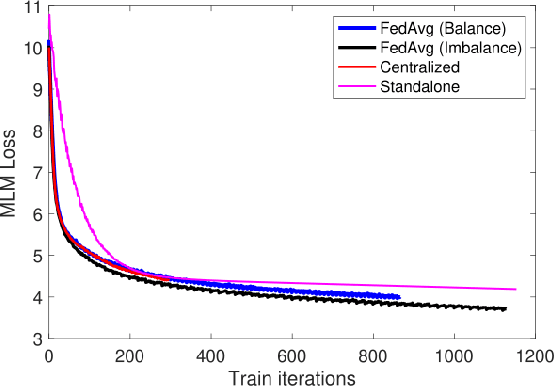
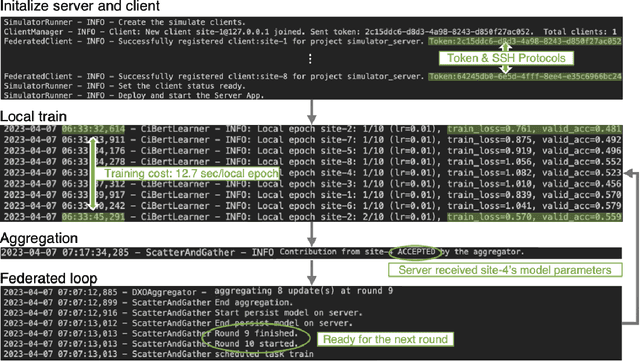
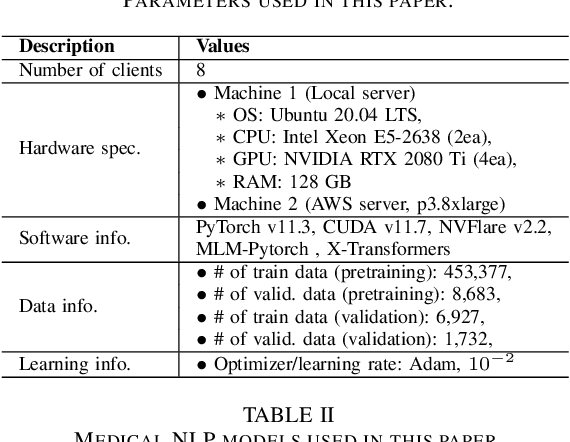
The prodigious growth of digital health data has precipitated a mounting interest in harnessing machine learning methodologies, such as natural language processing (NLP), to scrutinize medical records, clinical notes, and other text-based health information. Although NLP techniques have exhibited substantial potential in augmenting patient care and informing clinical decision-making, data privacy and adherence to regulations persist as critical concerns. Federated learning (FL) emerges as a viable solution, empowering multiple organizations to train machine learning models collaboratively without disseminating raw data. This paper proffers a pragmatic approach to medical NLP by amalgamating FL, NLP models, and the NVFlare framework, developed by NVIDIA. We introduce two exemplary NLP models, the Long-Short Term Memory (LSTM)-based model and Bidirectional Encoder Representations from Transformers (BERT), which have demonstrated exceptional performance in comprehending context and semantics within medical data. This paper encompasses the development of an integrated framework that addresses data privacy and regulatory compliance challenges while maintaining elevated accuracy and performance, incorporating BERT pretraining, and comprehensively substantiating the efficacy of the proposed approach.
Entropy-Aware Similarity for Balanced Clustering: A Case Study with Melanoma Detection
May 11, 2023Clustering data is an unsupervised learning approach that aims to divide a set of data points into multiple groups. It is a crucial yet demanding subject in machine learning and data mining. Its successful applications span various fields. However, conventional clustering techniques necessitate the consideration of balance significance in specific applications. Therefore, this paper addresses the challenge of imbalanced clustering problems and presents a new method for balanced clustering by utilizing entropy-aware similarity, which can be defined as the degree of balances. We have coined the term, entropy-aware similarity for balanced clustering (EASB), which maximizes balance during clustering by complementary clustering of unbalanced data and incorporating entropy in a novel similarity formula that accounts for both angular differences and distances. The effectiveness of the proposed approach is evaluated on actual melanoma medial data, specifically the International Skin Imaging Collaboration (ISIC) 2019 and 2020 challenge datasets, to demonstrate how it can successfully cluster the data while preserving balance. Lastly, we can confirm that the proposed method exhibited outstanding performance in detecting melanoma, comparing to classical methods.
Quantum Multi-Agent Actor-Critic Networks for Cooperative Mobile Access in Multi-UAV Systems
Feb 09, 2023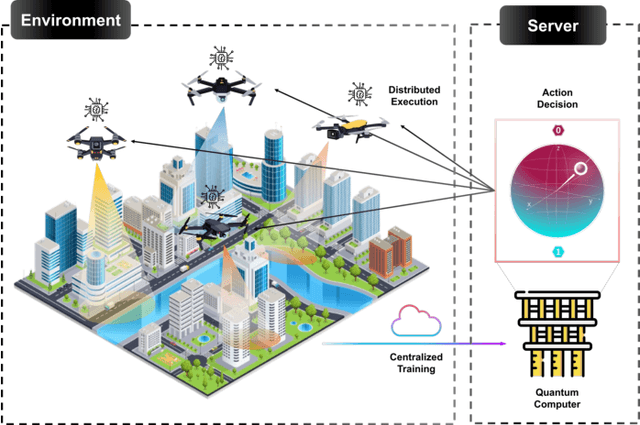
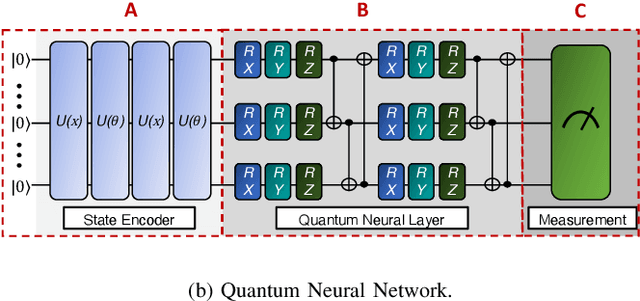
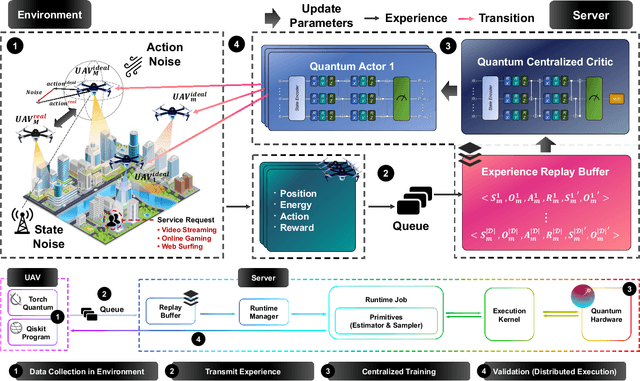
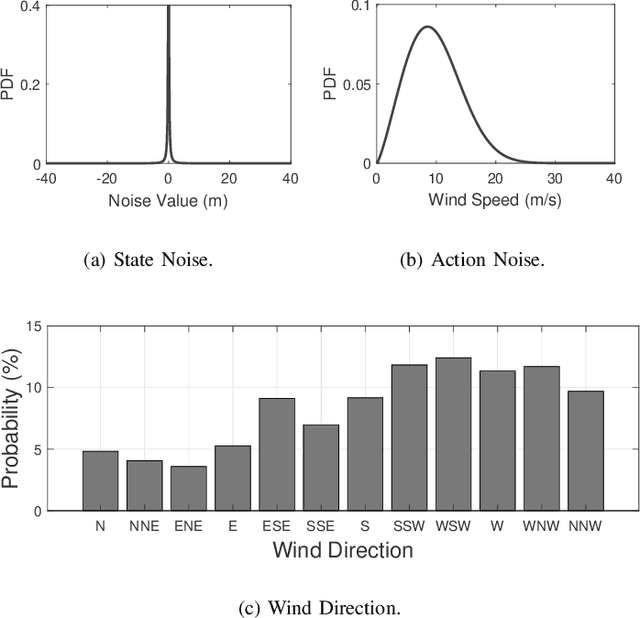
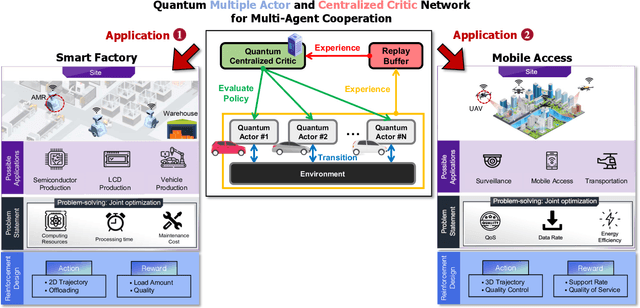
This paper proposes a novel quantum multi-agent actor-critic networks (QMACN) algorithm for autonomously constructing a robust mobile access system using multiple unmanned aerial vehicles (UAVs). For the cooperation of multiple UAVs for autonomous mobile access, multi-agent reinforcement learning (MARL) methods are considered. In addition, we also adopt the concept of quantum computing (QC) to improve the training and inference performances. By utilizing QC, scalability and physical issues can happen. However, our proposed QMACN algorithm builds quantum critic and multiple actor networks in order to handle such problems. Thus, our proposed QMACN algorithm verifies the advantage of quantum MARL with remarkable performance improvements in terms of training speed and wireless service quality in various data-intensive evaluations. Furthermore, we validate that a noise injection scheme can be used for handling environmental uncertainties in order to realize robust mobile access. Our data-intensive simulation results verify that our proposed QMACN algorithm outperforms the other existing algorithms.
Quantum Multi-Agent Actor-Critic Neural Networks for Internet-Connected Multi-Robot Coordination in Smart Factory Management
Jan 04, 2023As one of the latest fields of interest in both academia and industry, quantum computing has garnered significant attention. Among various topics in quantum computing, variational quantum circuits (VQC) have been noticed for their ability to carry out quantum deep reinforcement learning (QRL). This paper verifies the potential of QRL, which will be further realized by implementing quantum multi-agent reinforcement learning (QMARL) from QRL, especially for Internet-connected autonomous multi-robot control and coordination in smart factory applications. However, the extension is not straightforward due to the non-stationarity of classical MARL. To cope with this, the centralized training and decentralized execution (CTDE) QMARL framework is proposed under the Internet connection. A smart factory environment with the Internet of Things (IoT)-based multiple agents is used to show the efficacy of the proposed algorithm. The simulation corroborates that the proposed QMARL-based autonomous multi-robot control and coordination performs better than the other frameworks.