 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Site Clinical Federated Learning using Recursive and Attentive Models and NVFlare
Jun 28, 2023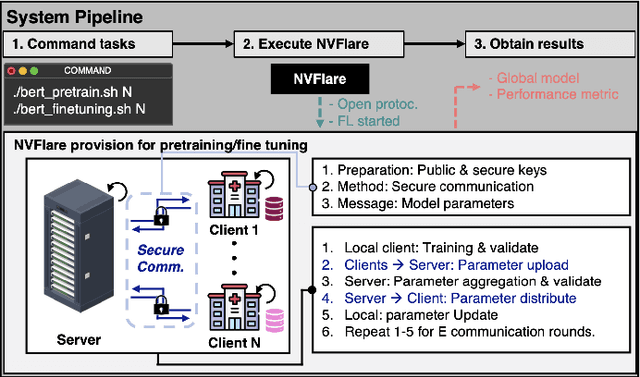
The prodigious growth of digital health data has precipitated a mounting interest in harnessing machine learning methodologies, such as natural language processing (NLP), to scrutinize medical records, clinical notes, and other text-based health information. Although NLP techniques have exhibited substantial potential in augmenting patient care and informing clinical decision-making, data privacy and adherence to regulations persist as critical concerns. Federated learning (FL) emerges as a viable solution, empowering multiple organizations to train machine learning models collaboratively without disseminating raw data. This paper proffers a pragmatic approach to medical NLP by amalgamating FL, NLP models, and the NVFlare framework, developed by NVIDIA. We introduce two exemplary NLP models, the Long-Short Term Memory (LSTM)-based model and Bidirectional Encoder Representations from Transformers (BERT), which have demonstrated exceptional performance in comprehending context and semantics within medical data. This paper encompasses the development of an integrated framework that addresses data privacy and regulatory compliance challenges while maintaining elevated accuracy and performance, incorporating BERT pretraining, and comprehensively substantiating the efficacy of the proposed approach.
Quantum Multi-Agent Actor-Critic Networks for Cooperative Mobile Access in Multi-UAV Systems
Feb 09, 2023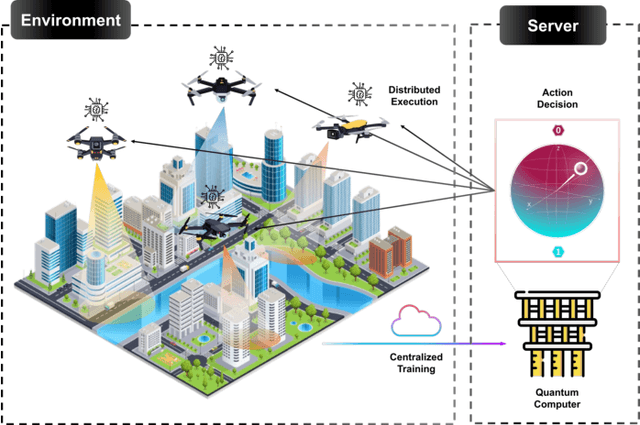
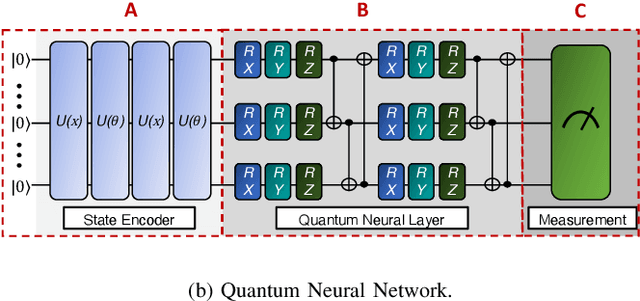
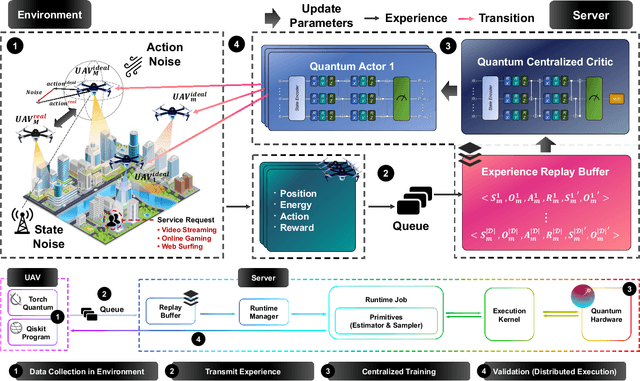
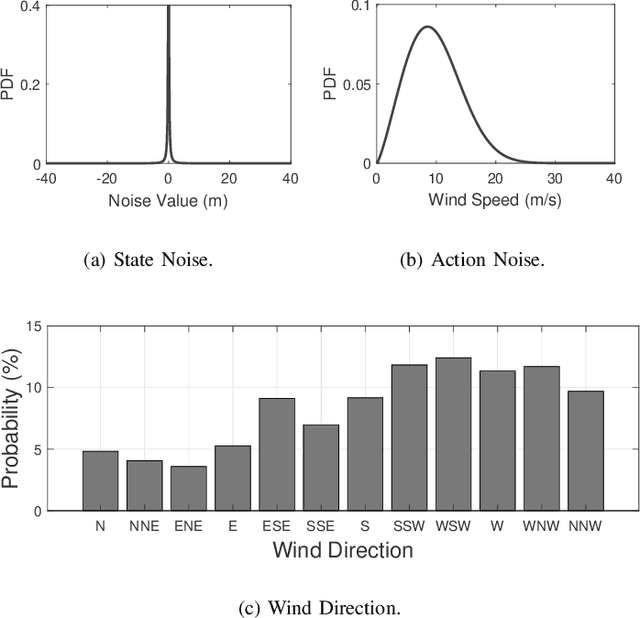
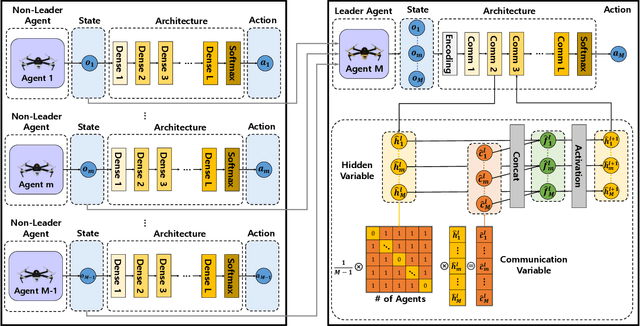
This paper proposes a novel quantum multi-agent actor-critic networks (QMACN) algorithm for autonomously constructing a robust mobile access system using multiple unmanned aerial vehicles (UAVs). For the cooperation of multiple UAVs for autonomous mobile access, multi-agent reinforcement learning (MARL) methods are considered. In addition, we also adopt the concept of quantum computing (QC) to improve the training and inference performances. By utilizing QC, scalability and physical issues can happen. However, our proposed QMACN algorithm builds quantum critic and multiple actor networks in order to handle such problems. Thus, our proposed QMACN algorithm verifies the advantage of quantum MARL with remarkable performance improvements in terms of training speed and wireless service quality in various data-intensive evaluations. Furthermore, we validate that a noise injection scheme can be used for handling environmental uncertainties in order to realize robust mobile access. Our data-intensive simulation results verify that our proposed QMACN algorithm outperforms the other existing algorithms.
Quantum Multi-Agent Actor-Critic Neural Networks for Internet-Connected Multi-Robot Coordination in Smart Factory Management
Jan 04, 2023As one of the latest fields of interest in both academia and industry, quantum computing has garnered significant attention. Among various topics in quantum computing, variational quantum circuits (VQC) have been noticed for their ability to carry out quantum deep reinforcement learning (QRL). This paper verifies the potential of QRL, which will be further realized by implementing quantum multi-agent reinforcement learning (QMARL) from QRL, especially for Internet-connected autonomous multi-robot control and coordination in smart factory applications. However, the extension is not straightforward due to the non-stationarity of classical MARL. To cope with this, the centralized training and decentralized execution (CTDE) QMARL framework is proposed under the Internet connection. A smart factory environment with the Internet of Things (IoT)-based multiple agents is used to show the efficacy of the proposed algorithm. The simulation corroborates that the proposed QMARL-based autonomous multi-robot control and coordination performs better than the other frameworks.
Situation-Aware Deep Reinforcement Learning for Autonomous Nonlinear Mobility Control in Cyber-Physical Loitering Munition Systems
Dec 31, 2022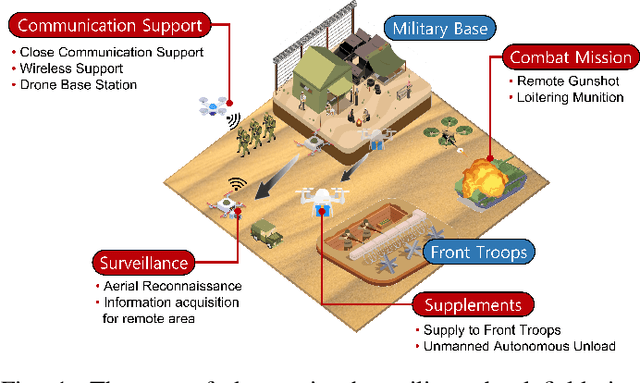
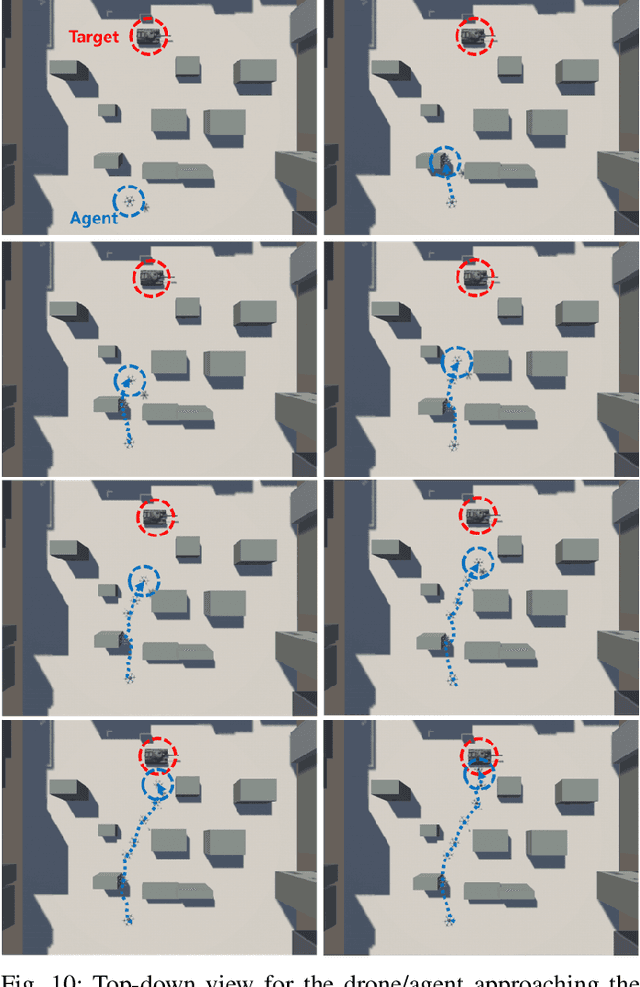
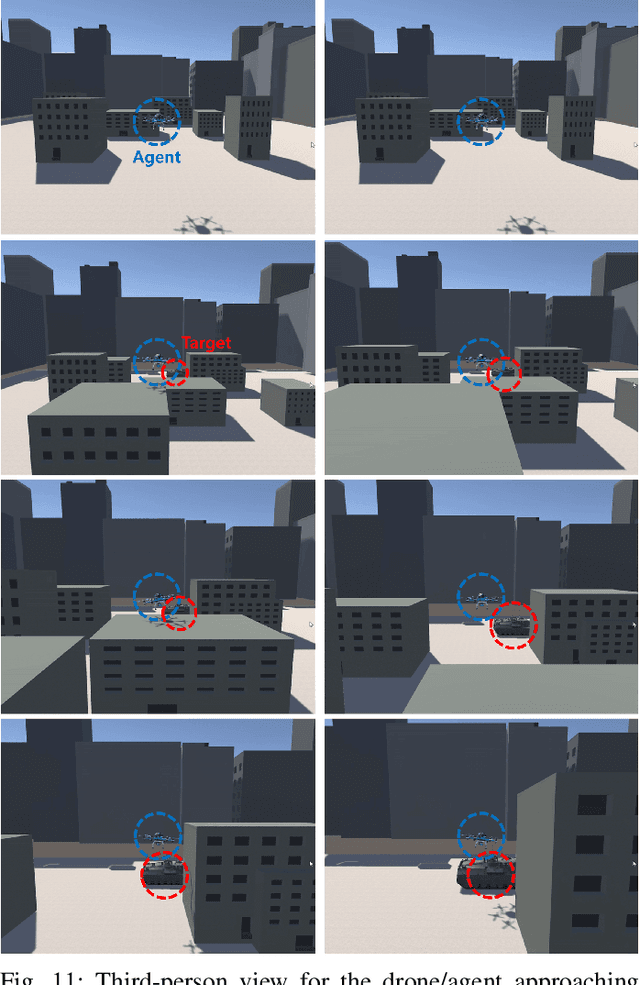
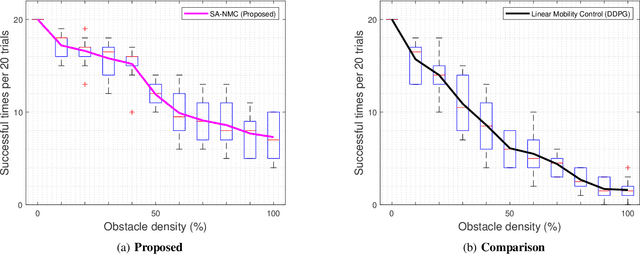
According to the rapid development of drone technologies, drones are widely used in many applications including military domains. In this paper, a novel situation-aware DRL- based autonomous nonlinear drone mobility control algorithm in cyber-physical loitering munition applications. On the battlefield, the design of DRL-based autonomous control algorithm is not straightforward because real-world data gathering is generally not available. Therefore, the approach in this paper is that cyber-physical virtual environment is constructed with Unity environment. Based on the virtual cyber-physical battlefield scenarios, a DRL-based automated nonlinear drone mobility control algorithm can be designed, evaluated, and visualized. Moreover, many obstacles exist which is harmful for linear trajectory control in real-world battlefield scenarios. Thus, our proposed autonomous nonlinear drone mobility control algorithm utilizes situation-aware components those are implemented with a Raycast function in Unity virtual scenarios. Based on the gathered situation-aware information, the drone can autonomously and nonlinearly adjust its trajectory during flight. Therefore, this approach is obviously beneficial for avoiding obstacles in obstacle-deployed battlefields. Our visualization-based performance evaluation shows that the proposed algorithm is superior from the other linear mobility control algorithms.
Quantum Federated Learning with Entanglement Controlled Circuits and Superposition Coding
Dec 04, 2022While witnessing the noisy intermediate-scale quantum (NISQ) era and beyond, quantum federated learning (QFL) has recently become an emerging field of study. In QFL, each quantum computer or device locally trains its quantum neural network (QNN) with trainable gates, and communicates only these gate parameters over classical channels, without costly quantum communications. Towards enabling QFL under various channel conditions, in this article we develop a depth-controllable architecture of entangled slimmable quantum neural networks (eSQNNs), and propose an entangled slimmable QFL (eSQFL) that communicates the superposition-coded parameters of eS-QNNs. Compared to the existing depth-fixed QNNs, training the depth-controllable eSQNN architecture is more challenging due to high entanglement entropy and inter-depth interference, which are mitigated by introducing entanglement controlled universal (CU) gates and an inplace fidelity distillation (IPFD) regularizer penalizing inter-depth quantum state differences, respectively. Furthermore, we optimize the superposition coding power allocation by deriving and minimizing the convergence bound of eSQFL. In an image classification task, extensive simulations corroborate the effectiveness of eSQFL in terms of prediction accuracy, fidelity, and entropy compared to Vanilla QFL as well as under different channel conditions and various data distributions.
Visual Simulation Software Demonstration for Quantum Multi-Drone Reinforcement Learning
Nov 24, 2022Quantum computing (QC) has received a lot of attention according to its light training parameter numbers and computational speeds by qubits. Moreover, various researchers have tried to enable quantum machine learning (QML) using QC, where there are also multifarious efforts to use QC to implement quantum multi-agent reinforcement learning (QMARL). Existing classical multi-agent reinforcement learning (MARL) using neural network features non-stationarity and uncertain properties due to its large number of parameters. Therefore, this paper presents a visual simulation software framework for a novel QMARL algorithm to control autonomous multi-drone systems to take advantage of QC. Our proposed QMARL framework accomplishes reasonable reward convergence and service quality performance with fewer trainable parameters than the classical MARL. Furthermore, QMARL shows more stable training results than existing MARL algorithms. Lastly, our proposed visual simulation software allows us to analyze the agents' training process and results.
Projection Valued Measure-based Quantum Machine Learning for Multi-Class Classification
Nov 14, 2022
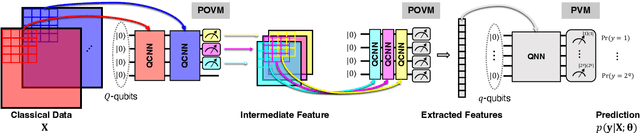


In recent years, quantum machine learning (QML) has been actively used for various tasks, e.g., classification, reinforcement learning, and adversarial learning. However, these QML studies are unable to carry out complex tasks due to scalability issues on input and output which is currently the biggest hurdle in QML. Therefore, the purpose of this paper is to overcome the problem of scalability. Motivated by this challenge, we focus on projection-valued measurements (PVM) which utilize the nature of probability amplitude in quantum statistical mechanics. By leveraging PVM, the output dimension is expanded from $q$, which is the number of qubits, to $2^q$. We propose a novel QML framework that utilizes PVM for multi-class classification. Our framework is proven to outperform the state-of-the-art (SOTA) methodologies with various datasets, assuming no more than 6 qubits are used. Furthermore, our PVM-based QML shows about $42.2\%$ better performance than the SOTA framework.
Quantum Split Neural Network Learning using Cross-Channel Pooling
Nov 12, 2022In recent years, quantum has been attracted by various fields such as quantum machine learning, quantum communication, and quantum computers. Among them, quantum federated learning (QFL) has recently received increasing attention, where quantum neural networks (QNNs) are integrated into federated learning (FL). In contrast to the existing QFL methods, we propose quantum split learning (QSL), which is the extension version of split learning. In classical computing, split learning has shown many advantages in faster convergence, communication cost, and even privacy. To fully utilize QSL, we propose crosschannel pooling which leverages the unique nature of quantum state tomography that is made by QNN. In numerical results, we corroborate that QSL achieves not only 1.64% higher top-1 accuracy than QFL but shows privacy-preserving in the MNIST classification task.
3D Scalable Quantum Convolutional Neural Networks for Point Cloud Data Processing in Classification Applications
Oct 18, 2022
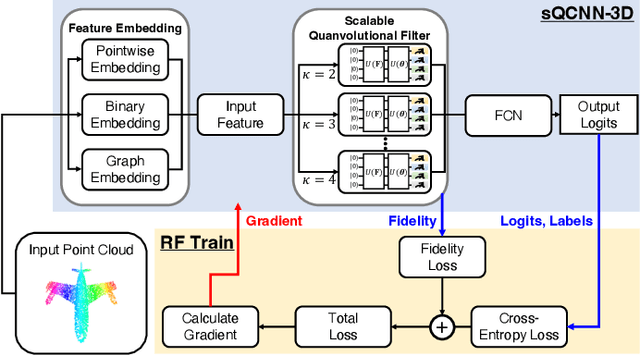

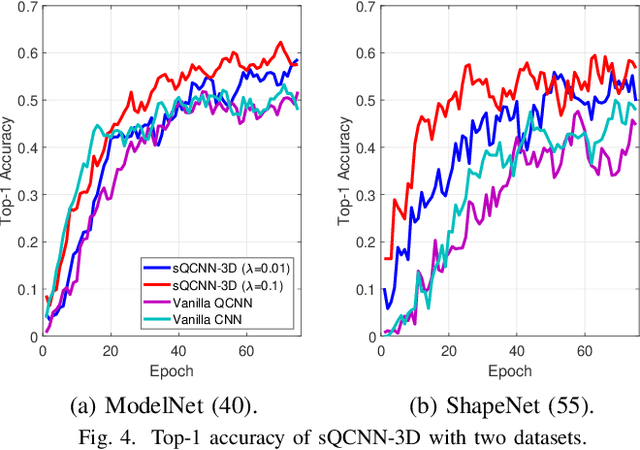
With the beginning of the noisy intermediate-scale quantum (NISQ) era, a quantum neural network (QNN) has recently emerged as a solution for several specific problems that classical neural networks cannot solve. Moreover, a quantum convolutional neural network (QCNN) is the quantum-version of CNN because it can process high-dimensional vector inputs in contrast to QNN. However, due to the nature of quantum computing, it is difficult to scale up the QCNN to extract a sufficient number of features due to barren plateaus. Motivated by this, a novel 3D scalable QCNN (sQCNN-3D) is proposed for point cloud data processing in classification applications. Furthermore, reverse fidelity training (RF-Train) is additionally considered on top of sQCNN-3D for diversifying features with a limited number of qubits using the fidelity of quantum computing. Our data-intensive performance evaluation verifies that the proposed algorithm achieves desired performance.
Cooperative Multi-Agent Deep Reinforcement Learning for Reliable and Energy-Efficient Mobile Access via Multi-UAV Control
Oct 03, 2022


This paper addresses a novel multi-agent deep reinforcement learning (MADRL)-based multiple unmanned aerial vehicles (UAV) positioning algorithm for reliable mobile access services (i.e., UAVs work as mobile base stations), where the MADRL is designed by the concept of centralized training and distributed execution (CTDE) for multi-agent cooperation and coordination. The reliable mobile access services can be achieved in following two ways, i.e., (i) energy-efficient UAV operation and (ii) reliable wireless communication services. For energy-efficient UAV operation, the reward of our proposed MADRL algorithm contains the features for UAV energy consumption models in order to realize efficient operations. Furthermore, for reliable wireless communication services, the quality of service (QoS) requirements of individual users are considered as a part of rewards and 60GHz mmWave radio is used for mobile access. This paper considers the 60GHz mmWave access for utilizing the benefits of (i) ultra-wide-bandwidth for multi-Gbps high-speed communications and (ii) high-directional communications for spatial reuse that is obviously good for densely deployed users. Lastly, the performance of our proposed MADRL-based multi-UAV positioning algorithm is evaluated; and it can be confirmed that the proposed algorithm outperforms the other existing algorithms.