 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Multi-Agent Reinforcement Learning for Autonomous Mobility Cooperation
Aug 03, 2023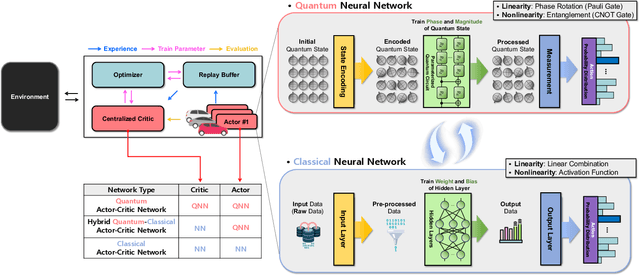
For Industry 4.0 Revolution, cooperative autonomous mobility systems are widely used based on multi-agent reinforcement learning (MARL). However, the MARL-based algorithms suffer from huge parameter utilization and convergence difficulties with many agents. To tackle these problems, a quantum MARL (QMARL) algorithm based on the concept of actor-critic network is proposed, which is beneficial in terms of scalability, to deal with the limitations in the noisy intermediate-scale quantum (NISQ) era. Additionally, our QMARL is also beneficial in terms of efficient parameter utilization and fast convergence due to quantum supremacy. Note that the reward in our QMARL is defined as task precision over computation time in multiple agents, thus, multi-agent cooperation can be realized. For further improvement, an additional technique for scalability is proposed, which is called projection value measure (PVM). Based on PVM, our proposed QMARL can achieve the highest reward, by reducing the action dimension into a logarithmic-scale. Finally, we can conclude that our proposed QMARL with PVM outperforms the other algorithms in terms of efficient parameter utilization, fast convergence, and scalability.
Quantum Multi-Agent Actor-Critic Networks for Cooperative Mobile Access in Multi-UAV Systems
Feb 09, 2023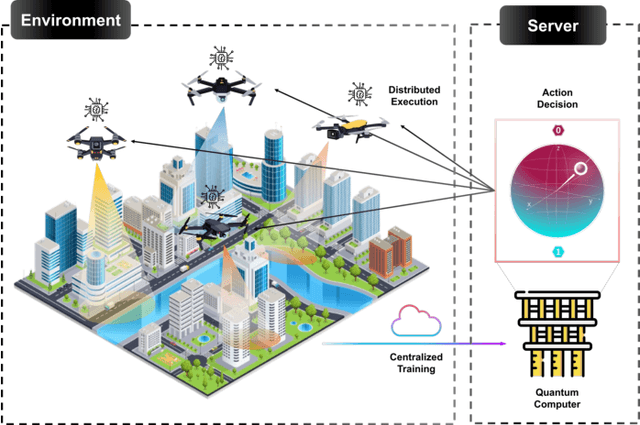
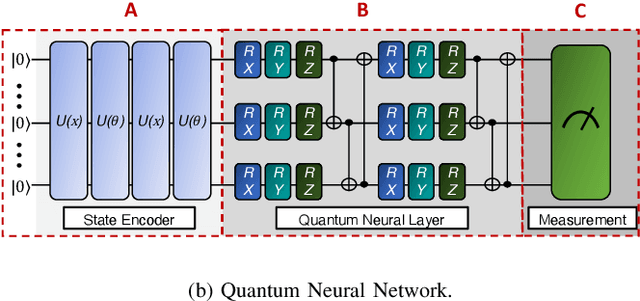
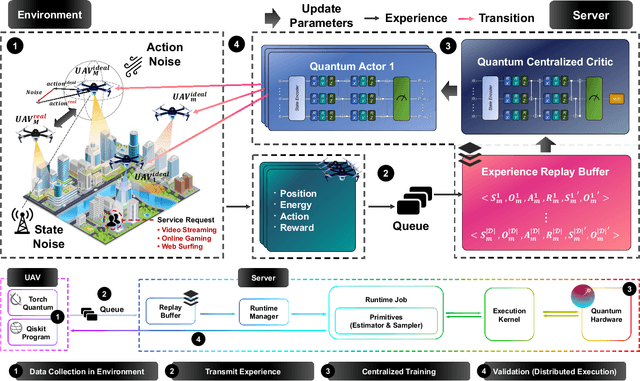
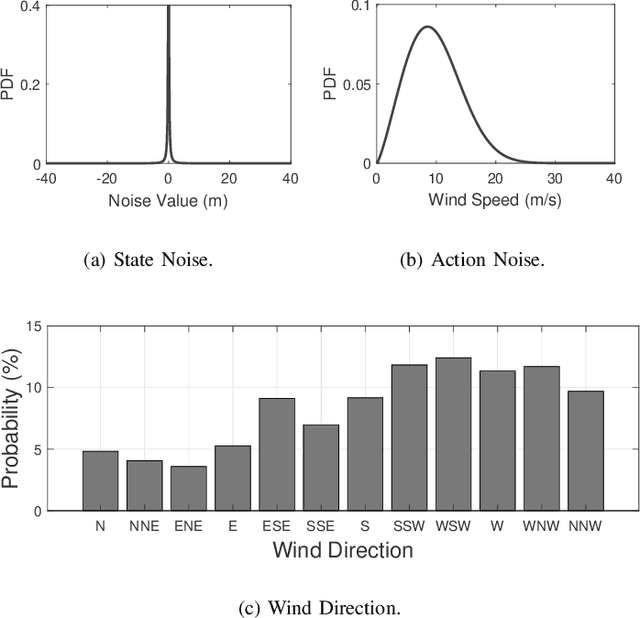
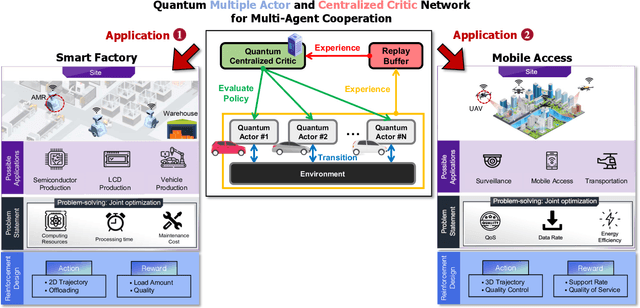
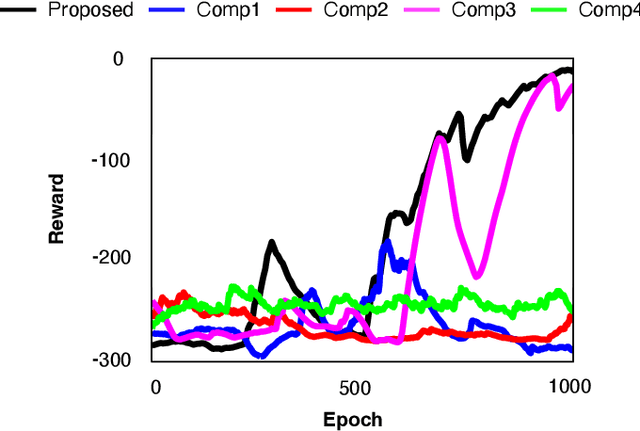
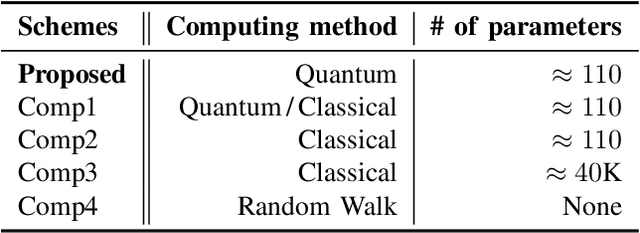
This paper proposes a novel quantum multi-agent actor-critic networks (QMACN) algorithm for autonomously constructing a robust mobile access system using multiple unmanned aerial vehicles (UAVs). For the cooperation of multiple UAVs for autonomous mobile access, multi-agent reinforcement learning (MARL) methods are considered. In addition, we also adopt the concept of quantum computing (QC) to improve the training and inference performances. By utilizing QC, scalability and physical issues can happen. However, our proposed QMACN algorithm builds quantum critic and multiple actor networks in order to handle such problems. Thus, our proposed QMACN algorithm verifies the advantage of quantum MARL with remarkable performance improvements in terms of training speed and wireless service quality in various data-intensive evaluations. Furthermore, we validate that a noise injection scheme can be used for handling environmental uncertainties in order to realize robust mobile access. Our data-intensive simulation results verify that our proposed QMACN algorithm outperforms the other existing algorithms.
Quantum Multi-Agent Actor-Critic Neural Networks for Internet-Connected Multi-Robot Coordination in Smart Factory Management
Jan 04, 2023As one of the latest fields of interest in both academia and industry, quantum computing has garnered significant attention. Among various topics in quantum computing, variational quantum circuits (VQC) have been noticed for their ability to carry out quantum deep reinforcement learning (QRL). This paper verifies the potential of QRL, which will be further realized by implementing quantum multi-agent reinforcement learning (QMARL) from QRL, especially for Internet-connected autonomous multi-robot control and coordination in smart factory applications. However, the extension is not straightforward due to the non-stationarity of classical MARL. To cope with this, the centralized training and decentralized execution (CTDE) QMARL framework is proposed under the Internet connection. A smart factory environment with the Internet of Things (IoT)-based multiple agents is used to show the efficacy of the proposed algorithm. The simulation corroborates that the proposed QMARL-based autonomous multi-robot control and coordination performs better than the other frameworks.
Quantum Federated Learning with Entanglement Controlled Circuits and Superposition Coding
Dec 04, 2022While witnessing the noisy intermediate-scale quantum (NISQ) era and beyond, quantum federated learning (QFL) has recently become an emerging field of study. In QFL, each quantum computer or device locally trains its quantum neural network (QNN) with trainable gates, and communicates only these gate parameters over classical channels, without costly quantum communications. Towards enabling QFL under various channel conditions, in this article we develop a depth-controllable architecture of entangled slimmable quantum neural networks (eSQNNs), and propose an entangled slimmable QFL (eSQFL) that communicates the superposition-coded parameters of eS-QNNs. Compared to the existing depth-fixed QNNs, training the depth-controllable eSQNN architecture is more challenging due to high entanglement entropy and inter-depth interference, which are mitigated by introducing entanglement controlled universal (CU) gates and an inplace fidelity distillation (IPFD) regularizer penalizing inter-depth quantum state differences, respectively. Furthermore, we optimize the superposition coding power allocation by deriving and minimizing the convergence bound of eSQFL. In an image classification task, extensive simulations corroborate the effectiveness of eSQFL in terms of prediction accuracy, fidelity, and entropy compared to Vanilla QFL as well as under different channel conditions and various data distributions.
Visual Simulation Software Demonstration for Quantum Multi-Drone Reinforcement Learning
Nov 24, 2022Quantum computing (QC) has received a lot of attention according to its light training parameter numbers and computational speeds by qubits. Moreover, various researchers have tried to enable quantum machine learning (QML) using QC, where there are also multifarious efforts to use QC to implement quantum multi-agent reinforcement learning (QMARL). Existing classical multi-agent reinforcement learning (MARL) using neural network features non-stationarity and uncertain properties due to its large number of parameters. Therefore, this paper presents a visual simulation software framework for a novel QMARL algorithm to control autonomous multi-drone systems to take advantage of QC. Our proposed QMARL framework accomplishes reasonable reward convergence and service quality performance with fewer trainable parameters than the classical MARL. Furthermore, QMARL shows more stable training results than existing MARL algorithms. Lastly, our proposed visual simulation software allows us to analyze the agents' training process and results.
Slimmable Quantum Federated Learning
Jul 20, 2022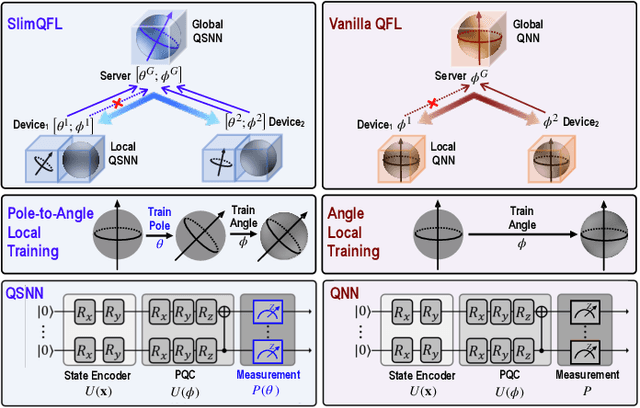
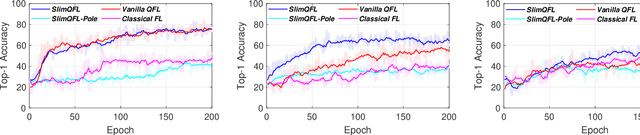

Quantum federated learning (QFL) has recently received increasing attention, where quantum neural networks (QNNs) are integrated into federated learning (FL). In contrast to the existing static QFL methods, we propose slimmable QFL (SlimQFL) in this article, which is a dynamic QFL framework that can cope with time-varying communication channels and computing energy limitations. This is made viable by leveraging the unique nature of a QNN where its angle parameters and pole parameters can be separately trained and dynamically exploited. Simulation results corroborate that SlimQFL achieves higher classification accuracy than Vanilla QFL, particularly under poor channel conditions on average.
Quantum Multi-Agent Reinforcement Learning via Variational Quantum Circuit Design
Mar 20, 2022


In recent years, quantum computing (QC) has been getting a lot of attention from industry and academia. Especially, among various QC research topics, variational quantum circuit (VQC) enables quantum deep reinforcement learning (QRL). Many studies of QRL have shown that the QRL is superior to the classical reinforcement learning (RL) methods under the constraints of the number of training parameters. This paper extends and demonstrates the QRL to quantum multi-agent RL (QMARL). However, the extension of QRL to QMARL is not straightforward due to the challenge of the noise intermediate-scale quantum (NISQ) and the non-stationary properties in classical multi-agent RL (MARL). Therefore, this paper proposes the centralized training and decentralized execution (CTDE) QMARL framework by designing novel VQCs for the framework to cope with these issues. To corroborate the QMARL framework, this paper conducts the QMARL demonstration in a single-hop environment where edge agents offload packets to clouds. The extensive demonstration shows that the proposed QMARL framework enhances 57.7% of total reward than classical frameworks.
Quantum Heterogeneous Distributed Deep Learning Architectures: Models, Discussions, and Applications
Mar 02, 2022
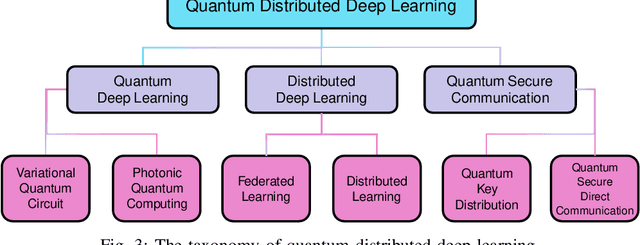
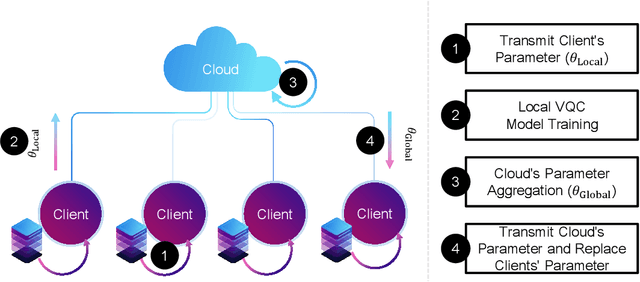
Deep learning (DL) has already become a state-of-the-art technology for various data processing tasks. However, data security and computational overload problems frequently occur due to their high data and computational power dependence. To solve this problem, quantum deep learning (QDL) and distributed deep learning (DDL) are emerging to complement existing DL methods by reducing computational overhead and strengthening data security. Furthermore, a quantum distributed deep learning (QDDL) technique that combines these advantages and maximizes them is in the spotlight. QDL takes computational gains by replacing deep learning computations on local devices and servers with quantum deep learning. On the other hand, besides the advantages of the existing distributed learning structure, it can increase data security by using a quantum secure communication protocol between the server and the client. Although many attempts have been made to confirm and demonstrate these various possibilities, QDDL research is still in its infancy. This paper discusses the model structure studied so far and its possibilities and limitations to introduce and promote these studies. It also discusses the areas of applied research so far and in the future and the possibilities of new methodologies.