 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Multi-Agent Actor-Critic Neural Networks for Internet-Connected Multi-Robot Coordination in Smart Factory Management
Jan 04, 2023As one of the latest fields of interest in both academia and industry, quantum computing has garnered significant attention. Among various topics in quantum computing, variational quantum circuits (VQC) have been noticed for their ability to carry out quantum deep reinforcement learning (QRL). This paper verifies the potential of QRL, which will be further realized by implementing quantum multi-agent reinforcement learning (QMARL) from QRL, especially for Internet-connected autonomous multi-robot control and coordination in smart factory applications. However, the extension is not straightforward due to the non-stationarity of classical MARL. To cope with this, the centralized training and decentralized execution (CTDE) QMARL framework is proposed under the Internet connection. A smart factory environment with the Internet of Things (IoT)-based multiple agents is used to show the efficacy of the proposed algorithm. The simulation corroborates that the proposed QMARL-based autonomous multi-robot control and coordination performs better than the other frameworks.
Multi-Agent Deep Reinforcement Learning for Efficient Passenger Delivery in Urban Air Mobility
Nov 13, 2022It has been considered that urban air mobility (UAM), also known as drone-taxi or electrical vertical takeoff and landing (eVTOL), will play a key role in future transportation. By putting UAM into practical future transportation, several benefits can be realized, i.e., (i) the total travel time of passengers can be reduced compared to traditional transportation and (ii) there is no environmental pollution and no special labor costs to operate the system because electric batteries will be used in UAM system. However, there are various dynamic and uncertain factors in the flight environment, i.e., passenger sudden service requests, battery discharge, and collision among UAMs. Therefore, this paper proposes a novel cooperative MADRL algorithm based on centralized training and distributed execution (CTDE) concepts for reliable and efficient passenger delivery in UAM networks. According to the performance evaluation results, we confirm that the proposed algorithm outperforms other existing algorithms in terms of the number of serviced passengers increase (30%) and the waiting time per serviced passenger decrease (26%)
Cooperative Multi-Agent Deep Reinforcement Learning for Reliable Surveillance via Autonomous Multi-UAV Control
Jan 15, 2022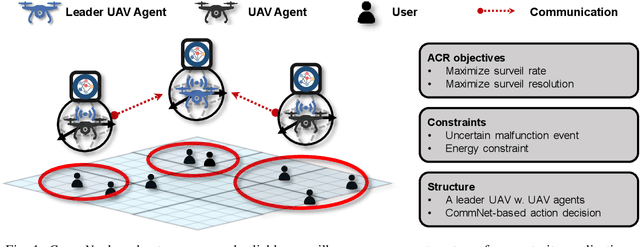
CCTV-based surveillance using unmanned aerial vehicles (UAVs) is considered a key technology for security in smart city environments. This paper creates a case where the UAVs with CCTV-cameras fly over the city area for flexible and reliable surveillance services. UAVs should be deployed to cover a large area while minimize overlapping and shadow areas for a reliable surveillance system. However, the operation of UAVs is subject to high uncertainty, necessitating autonomous recovery systems. This work develops a multi-agent deep reinforcement learning-based management scheme for reliable industry surveillance in smart city applications. The core idea this paper employs is autonomously replenishing the UAV's deficient network requirements with communications. Via intensive simulations, our proposed algorithm outperforms the state-of-the-art algorithms in terms of surveillance coverage, user support capability, and computational costs.
Spatio-Temporal Split Learning for Autonomous Aerial Surveillance using Urban Air Mobility (UAM) Networks
Nov 15, 2021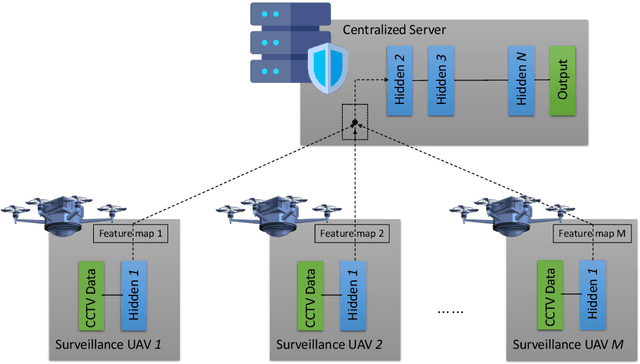
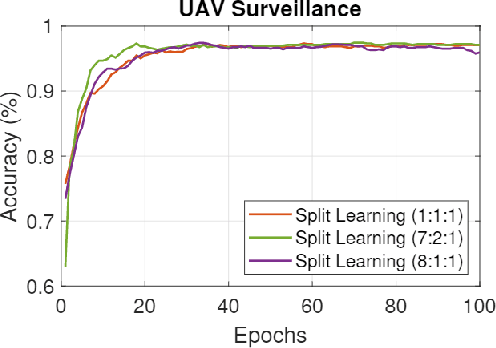
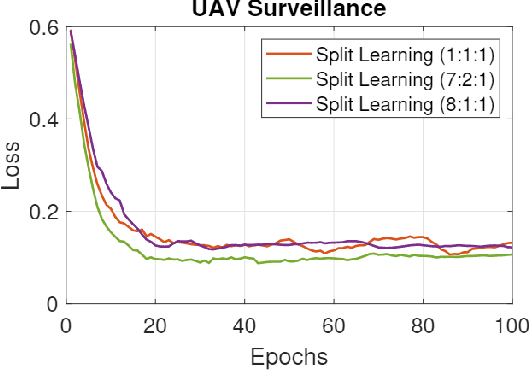
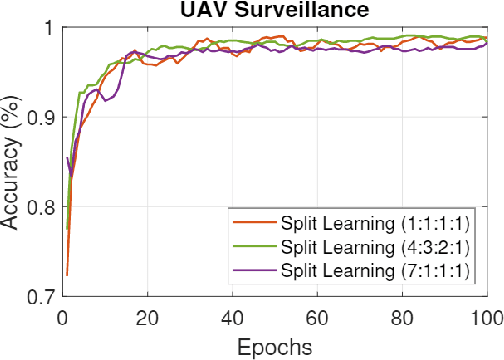
Autonomous surveillance unmanned aerial vehicles (UAVs) are deployed to observe the streets of the city for any suspicious activities. This paper utilizes surveillance UAVs for the purpose of detecting the presence of a fire in the streets. An extensive database is collected from UAV surveillance drones. With the aid of artificial intelligence (AI), fire stations can swiftly identify the presence of a fire emerging in the neighborhood. Spatio-temporal split learning is applied to this scenario to preserve privacy and globally train a fire classification model. Fires are hazardous natural disasters that can spread very quickly. Swift identification of fire is required to deploy firefighters to the scene. In order to do this, strong communication between the UAV and the central server where the deep learning process occurs is required. Improving communication resilience is integral to enhancing a safe experience on the roads. Therefore, this paper explores the adequate number of clients and data ratios for split learning in this UAV setting, as well as the required network infrastructure.
Visualization of Deep Reinforcement Autonomous Aerial Mobility Learning Simulations
Feb 14, 2021
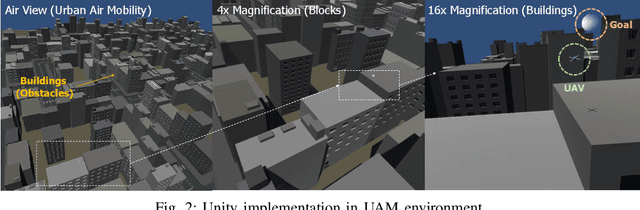
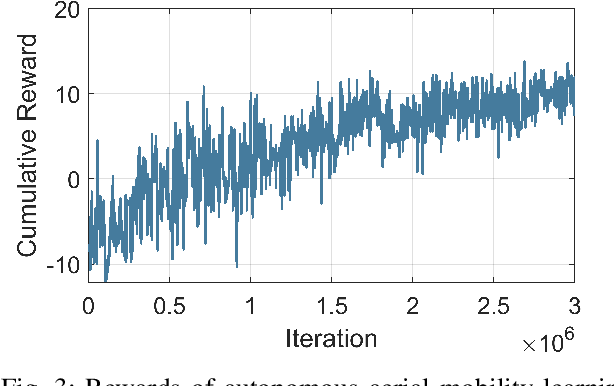
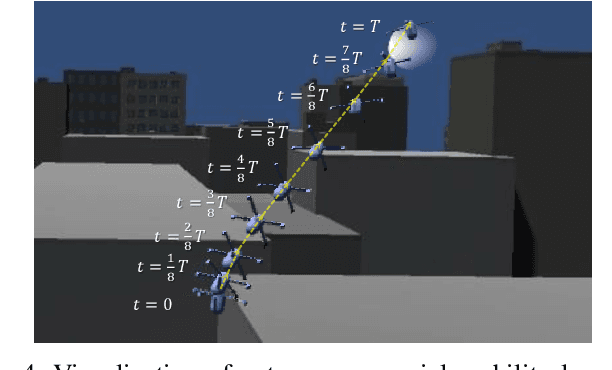
This demo abstract presents the visualization of deep reinforcement learning (DRL)-based autonomous aerial mobility simulations. In order to implement the software, Unity-RL is used and additional buildings are introduced for urban environment. On top of the implementation, DRL algorithms are used and we confirm it works well in terms of trajectory and 3D visualization.