 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHallucination-Aware Generative Pretrained Transformer for Cooperative Aerial Mobility Control
Apr 15, 2025This paper proposes SafeGPT, a two-tiered framework that integrates generative pretrained transformers (GPTs) with reinforcement learning (RL) for efficient and reliable unmanned aerial vehicle (UAV) last-mile deliveries. In the proposed design, a Global GPT module assigns high-level tasks such as sector allocation, while an On-Device GPT manages real-time local route planning. An RL-based safety filter monitors each GPT decision and overrides unsafe actions that could lead to battery depletion or duplicate visits, effectively mitigating hallucinations. Furthermore, a dual replay buffer mechanism helps both the GPT modules and the RL agent refine their strategies over time. Simulation results demonstrate that SafeGPT achieves higher delivery success rates compared to a GPT-only baseline, while substantially reducing battery consumption and travel distance. These findings validate the efficacy of combining GPT-based semantic reasoning with formal safety guarantees, contributing a viable solution for robust and energy-efficient UAV logistics.
Quantum Multi-Agent Reinforcement Learning for Autonomous Mobility Cooperation
Aug 03, 2023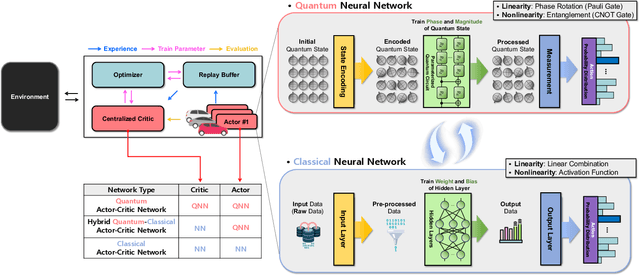
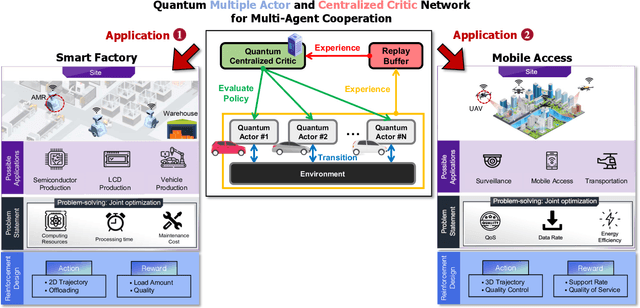
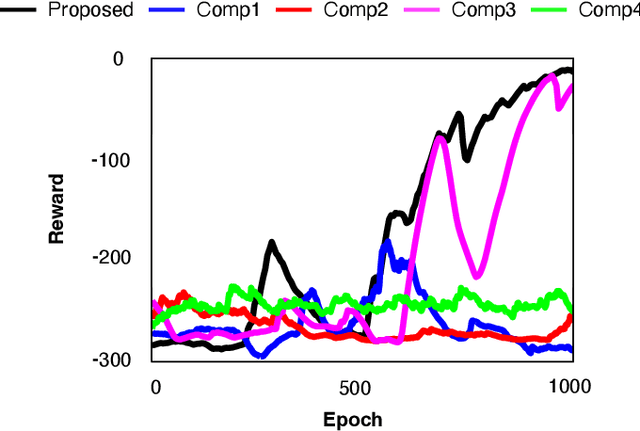
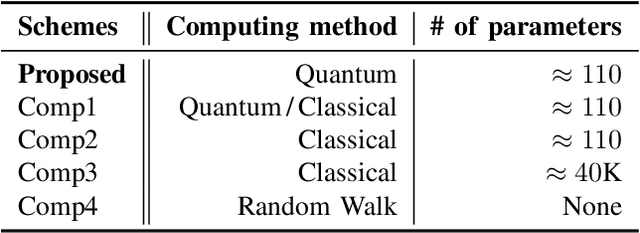
For Industry 4.0 Revolution, cooperative autonomous mobility systems are widely used based on multi-agent reinforcement learning (MARL). However, the MARL-based algorithms suffer from huge parameter utilization and convergence difficulties with many agents. To tackle these problems, a quantum MARL (QMARL) algorithm based on the concept of actor-critic network is proposed, which is beneficial in terms of scalability, to deal with the limitations in the noisy intermediate-scale quantum (NISQ) era. Additionally, our QMARL is also beneficial in terms of efficient parameter utilization and fast convergence due to quantum supremacy. Note that the reward in our QMARL is defined as task precision over computation time in multiple agents, thus, multi-agent cooperation can be realized. For further improvement, an additional technique for scalability is proposed, which is called projection value measure (PVM). Based on PVM, our proposed QMARL can achieve the highest reward, by reducing the action dimension into a logarithmic-scale. Finally, we can conclude that our proposed QMARL with PVM outperforms the other algorithms in terms of efficient parameter utilization, fast convergence, and scalability.
Two Tales of Platoon Intelligence for Autonomous Mobility Control: Enabling Deep Learning Recipes
Jul 19, 2023This paper presents the deep learning-based recent achievements to resolve the problem of autonomous mobility control and efficient resource management of autonomous vehicles and UAVs, i.e., (i) multi-agent reinforcement learning (MARL), and (ii) neural Myerson auction. Representatively, communication network (CommNet), which is one of the most popular MARL algorithms, is introduced to enable multiple agents to take actions in a distributed manner for their shared goals by training all agents' states and actions in a single neural network. Moreover, the neural Myerson auction guarantees trustfulness among multiple agents as well as achieves the optimal revenue of highly dynamic systems. Therefore, we survey the recent studies on autonomous mobility control based on MARL and neural Myerson auction. Furthermore, we emphasize that integration of MARL and neural Myerson auction is expected to be critical for efficient and trustful autonomous mobility services.
Quantum Multi-Agent Actor-Critic Networks for Cooperative Mobile Access in Multi-UAV Systems
Feb 09, 2023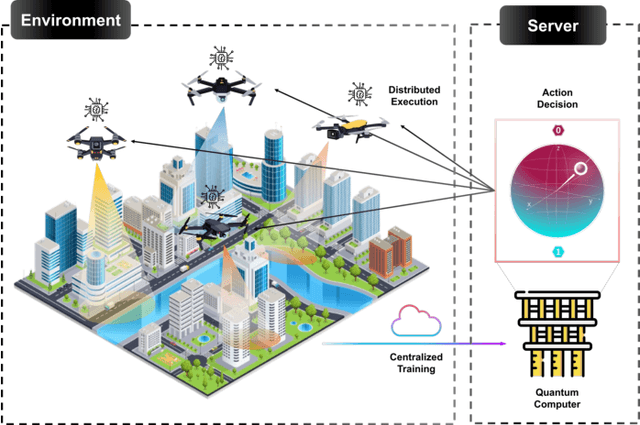
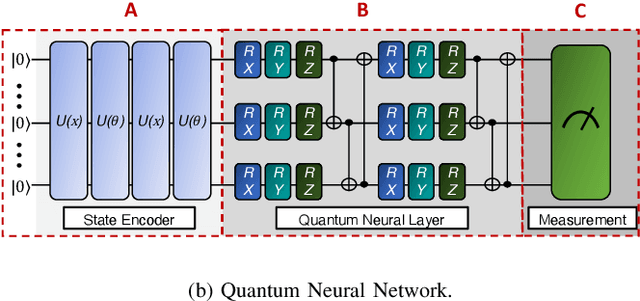
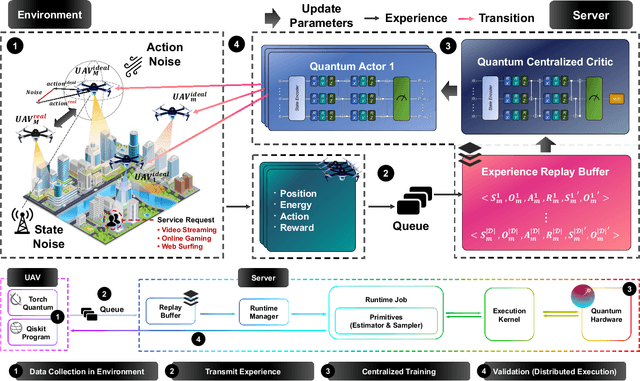
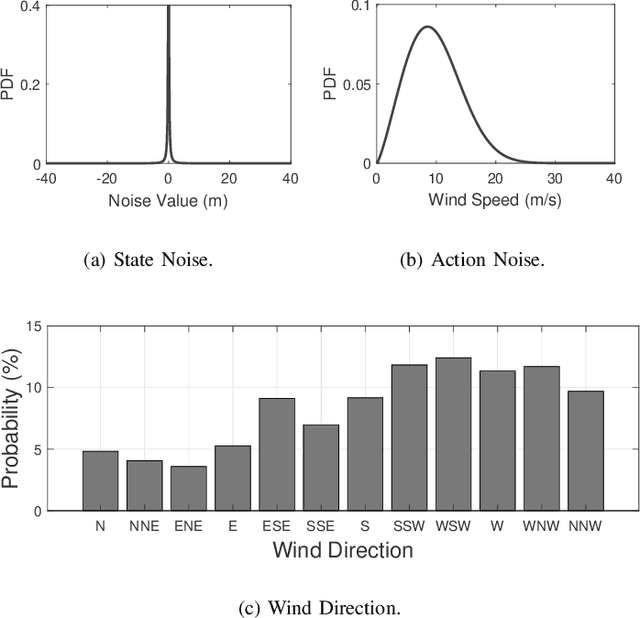
This paper proposes a novel quantum multi-agent actor-critic networks (QMACN) algorithm for autonomously constructing a robust mobile access system using multiple unmanned aerial vehicles (UAVs). For the cooperation of multiple UAVs for autonomous mobile access, multi-agent reinforcement learning (MARL) methods are considered. In addition, we also adopt the concept of quantum computing (QC) to improve the training and inference performances. By utilizing QC, scalability and physical issues can happen. However, our proposed QMACN algorithm builds quantum critic and multiple actor networks in order to handle such problems. Thus, our proposed QMACN algorithm verifies the advantage of quantum MARL with remarkable performance improvements in terms of training speed and wireless service quality in various data-intensive evaluations. Furthermore, we validate that a noise injection scheme can be used for handling environmental uncertainties in order to realize robust mobile access. Our data-intensive simulation results verify that our proposed QMACN algorithm outperforms the other existing algorithms.
Quantum Multi-Agent Actor-Critic Neural Networks for Internet-Connected Multi-Robot Coordination in Smart Factory Management
Jan 04, 2023As one of the latest fields of interest in both academia and industry, quantum computing has garnered significant attention. Among various topics in quantum computing, variational quantum circuits (VQC) have been noticed for their ability to carry out quantum deep reinforcement learning (QRL). This paper verifies the potential of QRL, which will be further realized by implementing quantum multi-agent reinforcement learning (QMARL) from QRL, especially for Internet-connected autonomous multi-robot control and coordination in smart factory applications. However, the extension is not straightforward due to the non-stationarity of classical MARL. To cope with this, the centralized training and decentralized execution (CTDE) QMARL framework is proposed under the Internet connection. A smart factory environment with the Internet of Things (IoT)-based multiple agents is used to show the efficacy of the proposed algorithm. The simulation corroborates that the proposed QMARL-based autonomous multi-robot control and coordination performs better than the other frameworks.
Situation-Aware Deep Reinforcement Learning for Autonomous Nonlinear Mobility Control in Cyber-Physical Loitering Munition Systems
Dec 31, 2022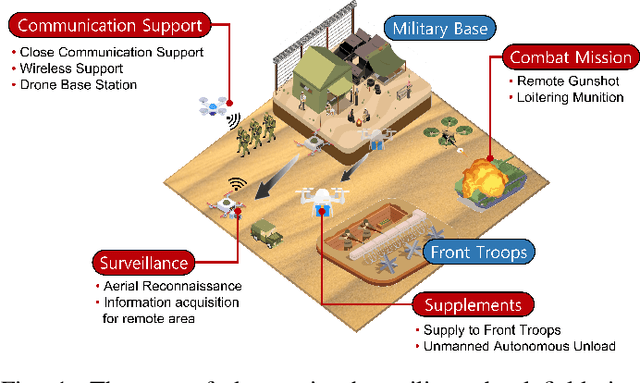
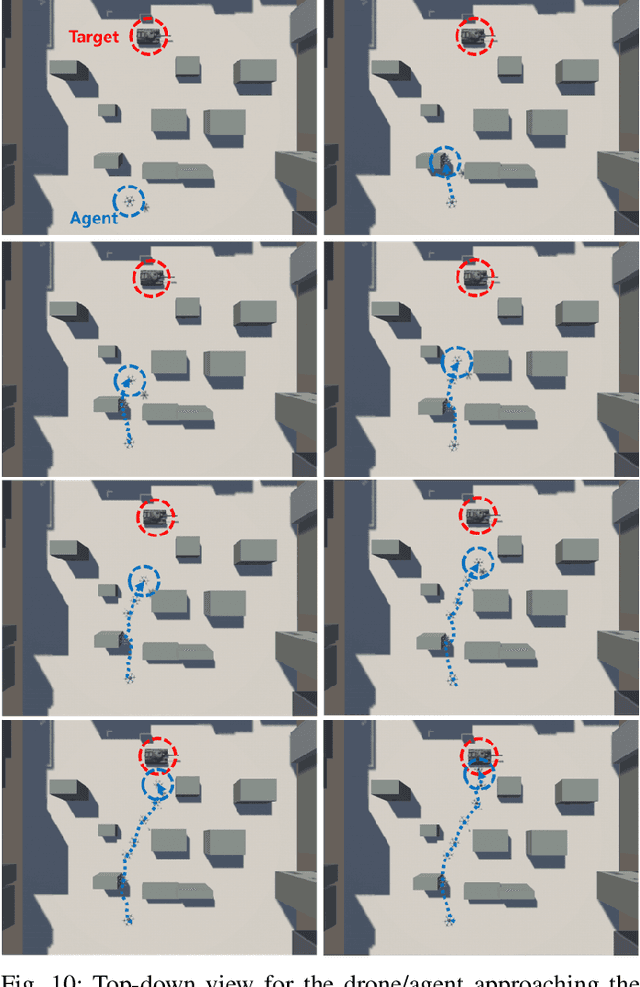
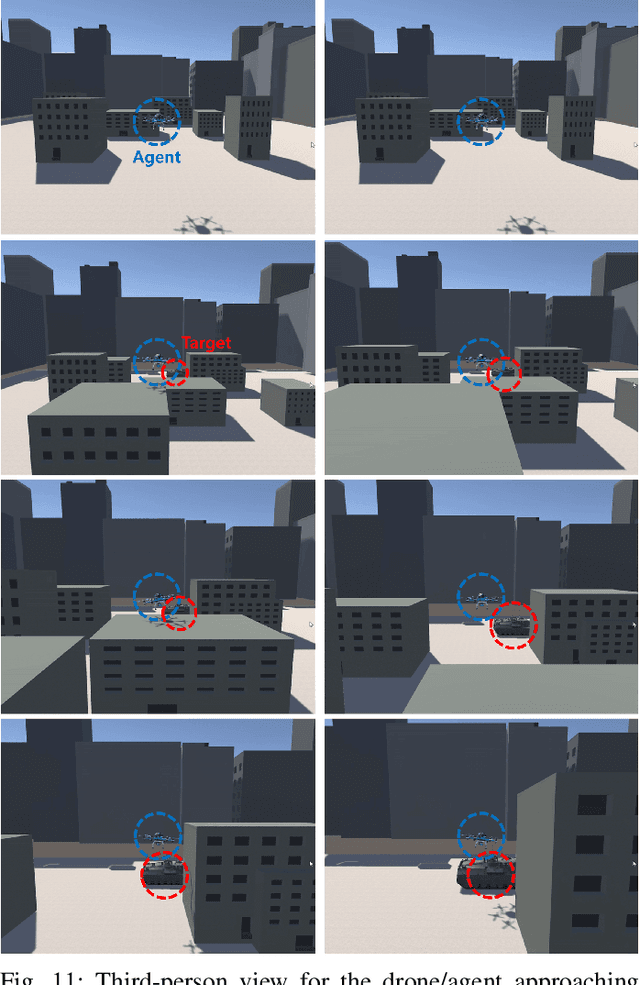
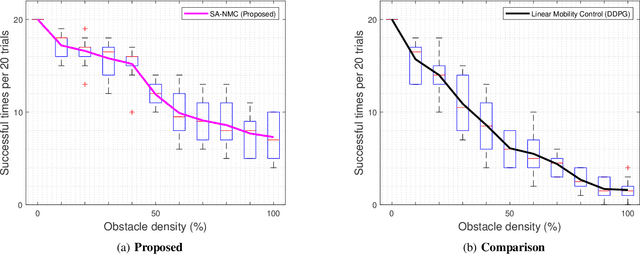
According to the rapid development of drone technologies, drones are widely used in many applications including military domains. In this paper, a novel situation-aware DRL- based autonomous nonlinear drone mobility control algorithm in cyber-physical loitering munition applications. On the battlefield, the design of DRL-based autonomous control algorithm is not straightforward because real-world data gathering is generally not available. Therefore, the approach in this paper is that cyber-physical virtual environment is constructed with Unity environment. Based on the virtual cyber-physical battlefield scenarios, a DRL-based automated nonlinear drone mobility control algorithm can be designed, evaluated, and visualized. Moreover, many obstacles exist which is harmful for linear trajectory control in real-world battlefield scenarios. Thus, our proposed autonomous nonlinear drone mobility control algorithm utilizes situation-aware components those are implemented with a Raycast function in Unity virtual scenarios. Based on the gathered situation-aware information, the drone can autonomously and nonlinearly adjust its trajectory during flight. Therefore, this approach is obviously beneficial for avoiding obstacles in obstacle-deployed battlefields. Our visualization-based performance evaluation shows that the proposed algorithm is superior from the other linear mobility control algorithms.
Quantum Federated Learning with Entanglement Controlled Circuits and Superposition Coding
Dec 04, 2022While witnessing the noisy intermediate-scale quantum (NISQ) era and beyond, quantum federated learning (QFL) has recently become an emerging field of study. In QFL, each quantum computer or device locally trains its quantum neural network (QNN) with trainable gates, and communicates only these gate parameters over classical channels, without costly quantum communications. Towards enabling QFL under various channel conditions, in this article we develop a depth-controllable architecture of entangled slimmable quantum neural networks (eSQNNs), and propose an entangled slimmable QFL (eSQFL) that communicates the superposition-coded parameters of eS-QNNs. Compared to the existing depth-fixed QNNs, training the depth-controllable eSQNN architecture is more challenging due to high entanglement entropy and inter-depth interference, which are mitigated by introducing entanglement controlled universal (CU) gates and an inplace fidelity distillation (IPFD) regularizer penalizing inter-depth quantum state differences, respectively. Furthermore, we optimize the superposition coding power allocation by deriving and minimizing the convergence bound of eSQFL. In an image classification task, extensive simulations corroborate the effectiveness of eSQFL in terms of prediction accuracy, fidelity, and entropy compared to Vanilla QFL as well as under different channel conditions and various data distributions.
Visual Simulation Software Demonstration for Quantum Multi-Drone Reinforcement Learning
Nov 24, 2022Quantum computing (QC) has received a lot of attention according to its light training parameter numbers and computational speeds by qubits. Moreover, various researchers have tried to enable quantum machine learning (QML) using QC, where there are also multifarious efforts to use QC to implement quantum multi-agent reinforcement learning (QMARL). Existing classical multi-agent reinforcement learning (MARL) using neural network features non-stationarity and uncertain properties due to its large number of parameters. Therefore, this paper presents a visual simulation software framework for a novel QMARL algorithm to control autonomous multi-drone systems to take advantage of QC. Our proposed QMARL framework accomplishes reasonable reward convergence and service quality performance with fewer trainable parameters than the classical MARL. Furthermore, QMARL shows more stable training results than existing MARL algorithms. Lastly, our proposed visual simulation software allows us to analyze the agents' training process and results.
Multi-Agent Deep Reinforcement Learning for Efficient Passenger Delivery in Urban Air Mobility
Nov 13, 2022It has been considered that urban air mobility (UAM), also known as drone-taxi or electrical vertical takeoff and landing (eVTOL), will play a key role in future transportation. By putting UAM into practical future transportation, several benefits can be realized, i.e., (i) the total travel time of passengers can be reduced compared to traditional transportation and (ii) there is no environmental pollution and no special labor costs to operate the system because electric batteries will be used in UAM system. However, there are various dynamic and uncertain factors in the flight environment, i.e., passenger sudden service requests, battery discharge, and collision among UAMs. Therefore, this paper proposes a novel cooperative MADRL algorithm based on centralized training and distributed execution (CTDE) concepts for reliable and efficient passenger delivery in UAM networks. According to the performance evaluation results, we confirm that the proposed algorithm outperforms other existing algorithms in terms of the number of serviced passengers increase (30%) and the waiting time per serviced passenger decrease (26%)
Neural Architectural Nonlinear Pre-Processing for mmWave Radar-based Human Gesture Perception
Nov 07, 2022



In modern on-driving computing environments, many sensors are used for context-aware applications. This paper utilizes two deep learning models, U-Net and EfficientNet, which consist of a convolutional neural network (CNN), to detect hand gestures and remove noise in the Range Doppler Map image that was measured through a millimeter-wave (mmWave) radar. To improve the performance of classification, accurate pre-processing algorithms are essential. Therefore, a novel pre-processing approach to denoise images before entering the first deep learning model stage increases the accuracy of classification. Thus, this paper proposes a deep neural network based high-performance nonlinear pre-processing method.