 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarization Reconfigurable Transmit-Receive Beam Alignment with Interpretable Transformer
Aug 17, 2025Recent advancement in next generation reconfigurable antenna and fluid antenna technology has influenced the wireless system with polarization reconfigurable (PR) channels to attract significant attention for promoting beneficial channel condition. We exploit the benefit of PR antennas by integrating such technology into massive multiple-input-multiple-output (MIMO) system. In particular, we aim to jointly design the polarization and beamforming vectors on both transceivers for simultaneous channel reconfiguration and beam alignment, which remarkably enhance the beamforming gain. However, joint optimization over polarization and beamforming vectors without channel state information (CSI) is a challenging task, since depolarization increases the channel dimension; whereas massive MIMO systems typically have low-dimensional pilot measurement from limited radio frequency (RF) chain. This leads to pilot overhead because the transceivers can only observe low-dimensional measurement of the high-dimension channel. This paper pursues the reduction of the pilot overhead in such systems by proposing to employ \emph{interpretable transformer}-based deep learning framework on both transceivers to actively design the polarization and beamforming vectors for pilot stage and transmission stage based on the sequence of accumulated received pilots. Numerical experiments demonstrate the significant performance gain of our proposed framework over the existing non-adaptive and active data-driven methods. Furthermore, we exploit the interpretability of our proposed framework to analyze the learning capabilities of the model.
Double-Side Polarization and Beamforming Alignment in Polarization Reconfigurable MISO System with Deep Neural Networks
Sep 30, 2024Polarization reconfigurable (PR) antennas enhance spectrum and energy efficiency between next-generation node B(gNB) and user equipment (UE). This is achieved by tuning the polarization vectors for each antenna element based on channel state information (CSI). On the other hand, degree of freedom increased by PR antennas yields a challenge in channel estimation with pilot training overhead. This paper pursues the reduction of pilot overhead, and proposes to employ deep neural networks (DNNs) on both transceiver ends to directly optimize the polarization and beamforming vectors based on the received pilots without the explicit channel estimation. Numerical experiments show that the proposed method significantly outperforms the conventional first-estimate-then-optimize scheme by maximum of 20% in beamforming gain.
Multi-Polarization Superposition Beamforming: Novel Scheme of Transmit Power Allocation and Subcarrier Assignment
Apr 03, 2024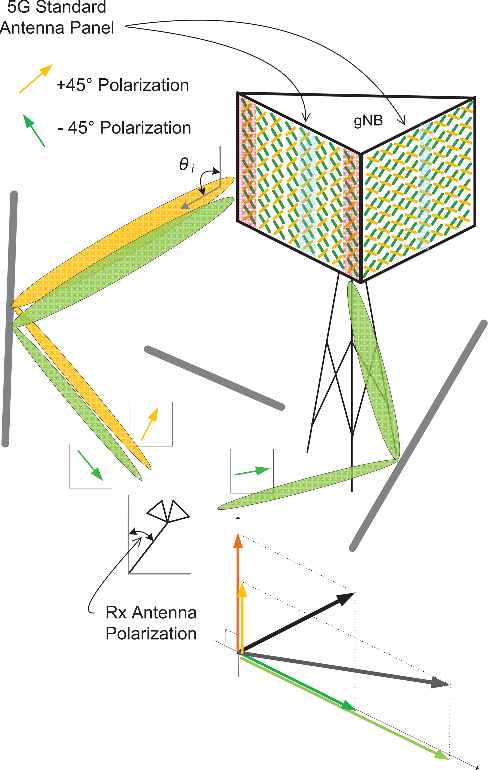

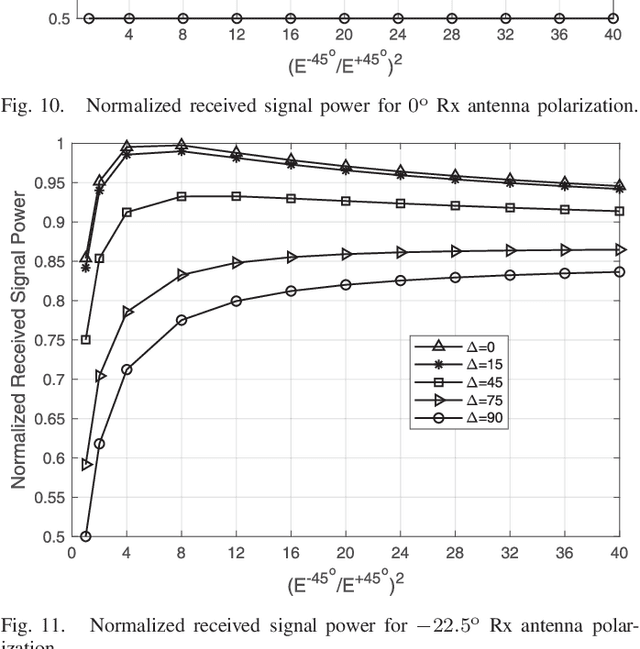

The 5th generation (5G) new radio (NR) access technology and the beyond-5G future wireless communication require extremely high data rate and spectrum efficiency. Energy-efficient transmission/reception schemes are also regarded as an important component. The polarization domain has attracted substantial attention in this aspects. This paper is the first to propose \textit{multi-polarization superposition beamforming (MPS-Beamforming)} with cross-polarization discrimination (XPD) and cross-polarization ratio (XPR)-aware transmit power allocation utilizing the 5G NR antenna panel structure. The appropriate orthogonal frequency division multiplexing (OFDM) subcarrier assignment algorithm is also proposed to verify the theoretical schemes via simulations. The detailed theoretical derivation along with comprehensive simulation results illustrate that the proposed novel scheme of MPS-Beamforming is significantly beneficial to the improvement of the performance in terms of the symbol error rate (SER) and signal-to-noise ratio (SNR) gain at the user equipment (UE). For instance, a provided practical wireless channel environment in the simulations exhibits 8 dB SNR gain for $10^{-4}$ SER in a deterministic channel, and 4 dB SNR gain for $10^{-5}$ SER in abundant statistical channel realizations.
Neural Myerson Auction for Truthful and Energy-Efficient Autonomous Aerial Data Delivery
Dec 29, 2021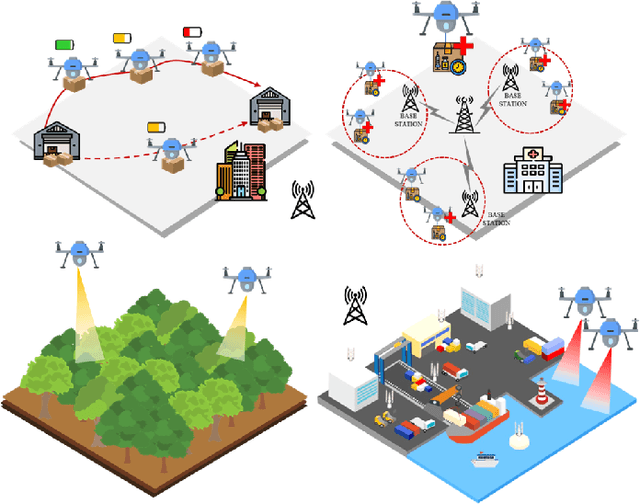
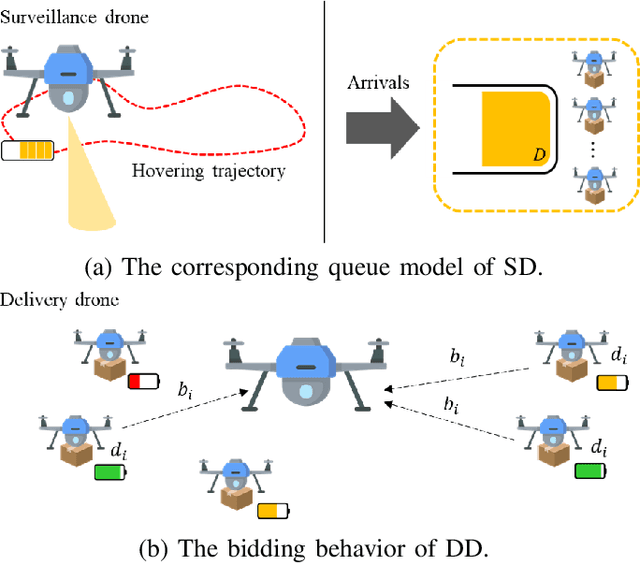
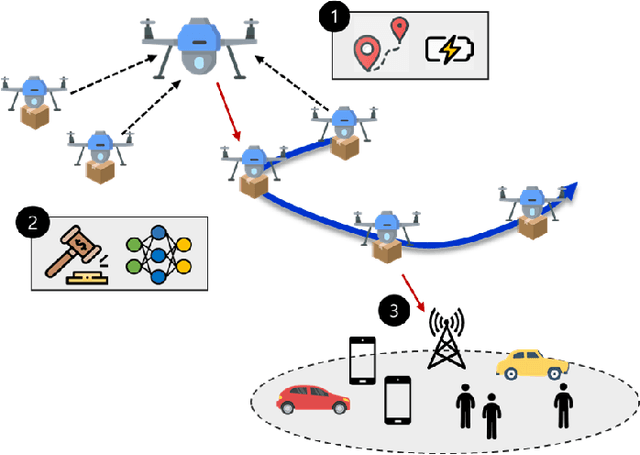
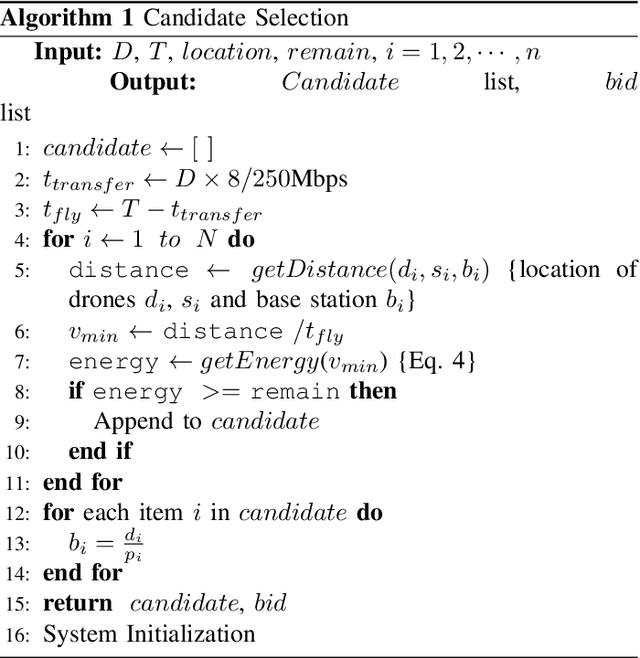
A successful deployment of drones provides an ideal solution for surveillance systems. Using drones for surveillance can provide access to areas that may be difficult or impossible to reach by humans or in-land vehicles gathering images or video recordings of a specific target in their coverage. Therefore, we introduces a data delivery drone to transfer collected surveillance data in harsh communication conditions. This paper proposes a Myerson auction-based asynchronous data delivery in an aerial distributed data platform in surveillance systems taking battery limitation and long flight constraints into account. In this paper, multiple delivery drones compete to offer data transfer to a single fixed-location surveillance drone. Our proposed Myerson auction-based algorithm, which uses the truthful second-price auction (SPA) as a baseline, is to maximize the seller's revenue while meeting several desirable properties, i.e., individual rationality and incentive compatibility while pursuing truthful operations. On top of these SPA-based operations, a deep learning-based framework is additionally designed for delivery performance improvements.
Parallelized and Randomized Adversarial Imitation Learning for Safety-Critical Self-Driving Vehicles
Dec 26, 2021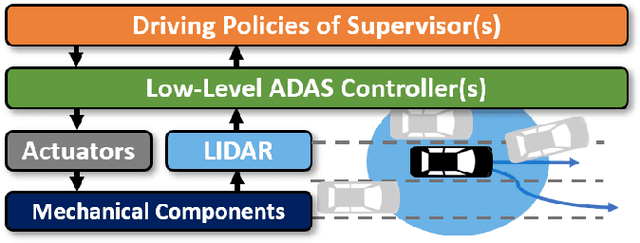
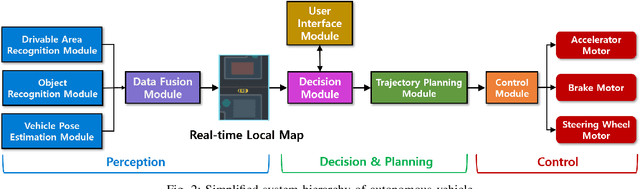


Self-driving cars and autonomous driving research has been receiving considerable attention as major promising prospects in modern artificial intelligence applications. According to the evolution of advanced driver assistance system (ADAS), the design of self-driving vehicle and autonomous driving systems becomes complicated and safety-critical. In general, the intelligent system simultaneously and efficiently activates ADAS functions. Therefore, it is essential to consider reliable ADAS function coordination to control the driving system, safely. In order to deal with this issue, this paper proposes a randomized adversarial imitation learning (RAIL) algorithm. The RAIL is a novel derivative-free imitation learning method for autonomous driving with various ADAS functions coordination; and thus it imitates the operation of decision maker that controls autonomous driving with various ADAS functions. The proposed method is able to train the decision maker that deals with the LIDAR data and controls the autonomous driving in multi-lane complex highway environments. The simulation-based evaluation verifies that the proposed method achieves desired performance.