 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAROON: A Framework for the Joint Characterization of Near-Field High-Resolution Radar and Optical Depth Imaging Techniques
Nov 01, 2024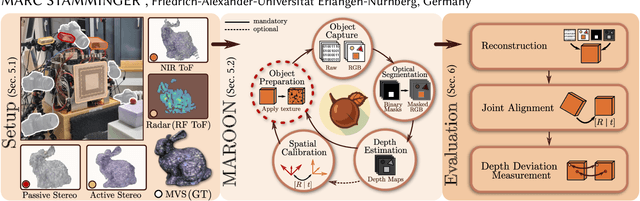
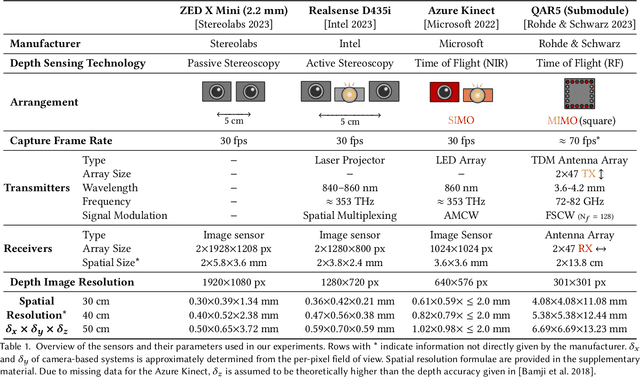
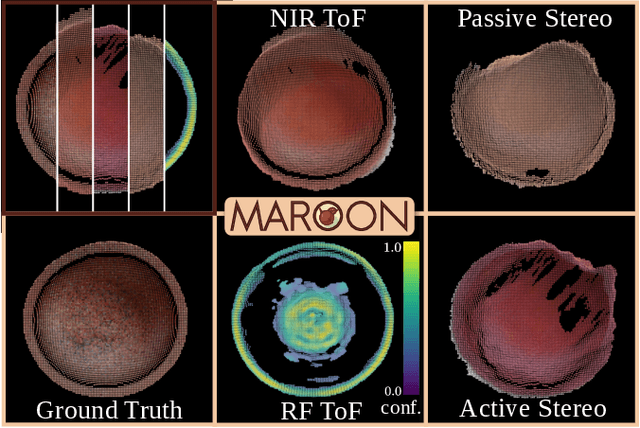
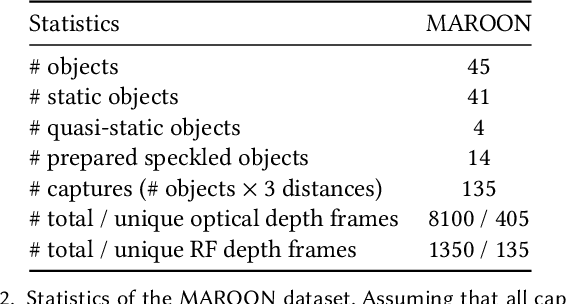
Utilizing the complementary strengths of wavelength-specific range or depth sensors is crucial for robust computer-assisted tasks such as autonomous driving. Despite this, there is still little research done at the intersection of optical depth sensors and radars operating close range, where the target is decimeters away from the sensors. Together with a growing interest in high-resolution imaging radars operating in the near field, the question arises how these sensors behave in comparison to their traditional optical counterparts. In this work, we take on the unique challenge of jointly characterizing depth imagers from both, the optical and radio-frequency domain using a multimodal spatial calibration. We collect data from four depth imagers, with three optical sensors of varying operation principle and an imaging radar. We provide a comprehensive evaluation of their depth measurements with respect to distinct object materials, geometries, and object-to-sensor distances. Specifically, we reveal scattering effects of partially transmissive materials and investigate the response of radio-frequency signals. All object measurements will be made public in form of a multimodal dataset, called MAROON.
An Efficient yet High-Performance Method for Precise Radar-Based Imaging of Human Hand Poses
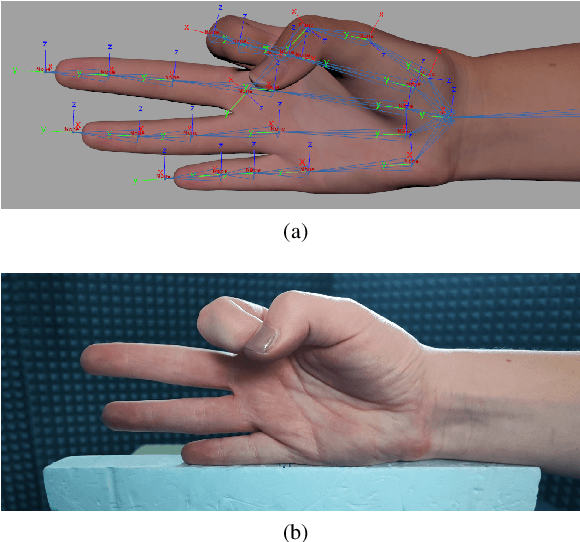
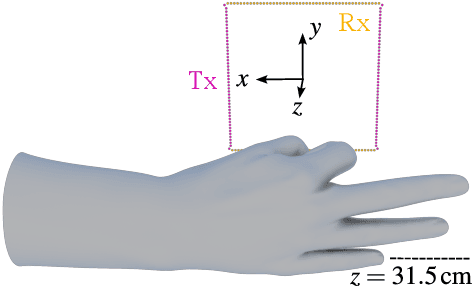
Jun 19, 2024Contactless hand pose estimation requires sensors that provide precise spatial information and low computational complexity for real-time processing. Unlike vision-based systems, radar offers lighting independence and direct motion assessments. Yet, there is limited research balancing real-time constraints, suitable frame rates for motion evaluations, and the need for precise 3D data. To address this, we extend the ultra-efficient two-tone hand imaging method from our prior work to a three-tone approach. Maintaining high frame rates and real-time constraints, this approach significantly enhances reconstruction accuracy and precision. We assess these measures by evaluating reconstruction results for different hand poses obtained by an imaging radar. Accuracy is assessed against ground truth from a spatially calibrated photogrammetry setup, while precision is measured using 3D-printed hand poses. The results emphasize the method's great potential for future radar-based hand sensing.
Automatic Spatial Calibration of Near-Field MIMO Radar With Respect to Optical Sensors
Mar 16, 2024



Despite an emerging interest in MIMO radar, the utilization of its complementary strengths in combination with optical sensors has so far been limited to far-field applications, due to the challenges that arise from mutual sensor calibration in the near field. In fact, most related approaches in the autonomous industry propose target-based calibration methods using corner reflectors that have proven to be unsuitable for the near field. In contrast, we propose a novel, joint calibration approach for optical RGB-D sensors and MIMO radars that is designed to operate in the radar's near-field range, within decimeters from the sensors. Our pipeline consists of a bespoke calibration target, allowing for automatic target detection and localization, followed by the spatial calibration of the two sensor coordinate systems through target registration. We validate our approach using two different depth sensing technologies from the optical domain. The experiments show the efficiency and accuracy of our calibration for various target displacements, as well as its robustness of our localization in terms of signal ambiguities.
Radar-Based Recognition of Static Hand Gestures in American Sign Language
Feb 20, 2024



In the fast-paced field of human-computer interaction (HCI) and virtual reality (VR), automatic gesture recognition has become increasingly essential. This is particularly true for the recognition of hand signs, providing an intuitive way to effortlessly navigate and control VR and HCI applications. Considering increased privacy requirements, radar sensors emerge as a compelling alternative to cameras. They operate effectively in low-light conditions without capturing identifiable human details, thanks to their lower resolution and distinct wavelength compared to visible light. While previous works predominantly deploy radar sensors for dynamic hand gesture recognition based on Doppler information, our approach prioritizes classification using an imaging radar that operates on spatial information, e.g. image-like data. However, generating large training datasets required for neural networks (NN) is a time-consuming and challenging process, often falling short of covering all potential scenarios. Acknowledging these challenges, this study explores the efficacy of synthetic data generated by an advanced radar ray-tracing simulator. This simulator employs an intuitive material model that can be adjusted to introduce data diversity. Despite exclusively training the NN on synthetic data, it demonstrates promising performance when put to the test with real measurement data. This emphasizes the practicality of our methodology in overcoming data scarcity challenges and advancing the field of automatic gesture recognition in VR and HCI applications.
A Realistic Radar Ray Tracing Simulator for Hand Pose Imaging
Jul 28, 2023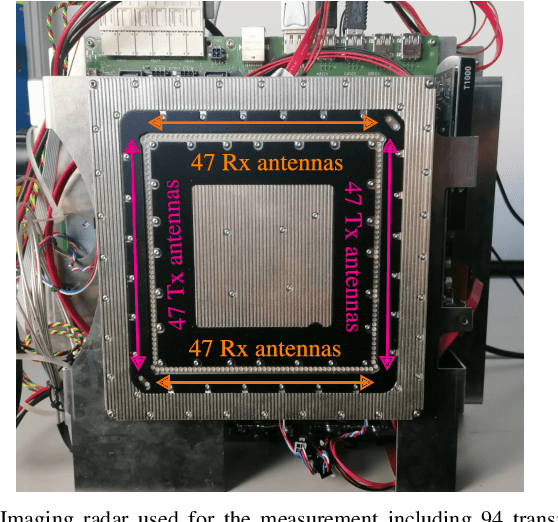
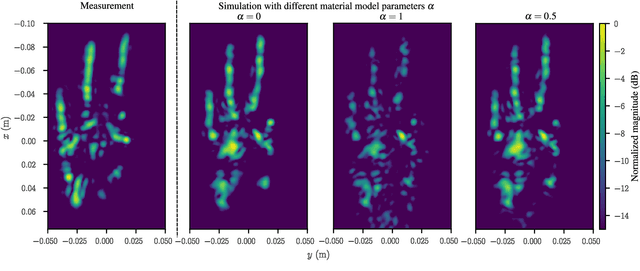
With the increasing popularity of human-computer interaction applications, there is also growing interest in generating sufficiently large and diverse data sets for automatic radar-based recognition of hand poses and gestures. Radar simulations are a vital approach to generating training data (e.g., for machine learning). Therefore, this work applies a ray tracing method to radar imaging of the hand. The performance of the proposed simulation approach is verified by a comparison of simulation and measurement data based on an imaging radar with a high lateral resolution. In addition, the surface material model incorporated into the ray tracer is highlighted in more detail and parameterized for radar hand imaging. Measurements and simulations show a very high similarity between synthetic and real radar image captures. The presented results demonstrate that it is possible to generate very realistic simulations of radar measurement data even for complex radar hand pose imaging systems.
ShaRPy: Shape Reconstruction and Hand Pose Estimation from RGB-D with Uncertainty
Mar 17, 2023Despite their potential, markerless hand tracking technologies are not yet applied in practice to the diagnosis or monitoring of the activity in inflammatory musculoskeletal diseases. One reason is that the focus of most methods lies in the reconstruction of coarse, plausible poses for gesture recognition or AR/VR applications, whereas in the clinical context, accurate, interpretable, and reliable results are required. Therefore, we propose ShaRPy, the first RGB-D Shape Reconstruction and hand Pose tracking system, which provides uncertainty estimates of the computed pose to guide clinical decision-making. Our method requires only a light-weight setup with a single consumer-level RGB-D camera yet it is able to distinguish similar poses with only small joint angle deviations. This is achieved by combining a data-driven dense correspondence predictor with traditional energy minimization, optimizing for both, pose and hand shape parameters. We evaluate ShaRPy on a keypoint detection benchmark and show qualitative results on recordings of a patient.