 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Face Reconstruction From Radar Images
Dec 03, 2024
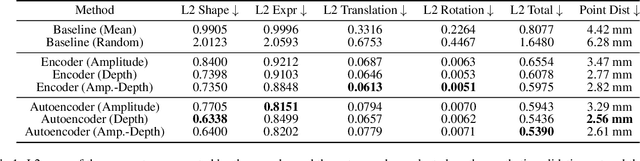
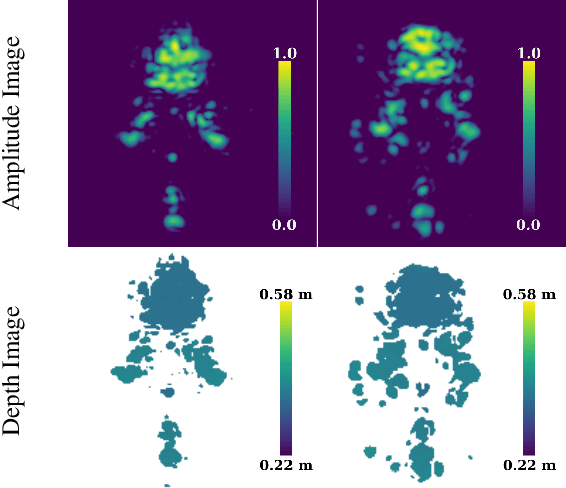
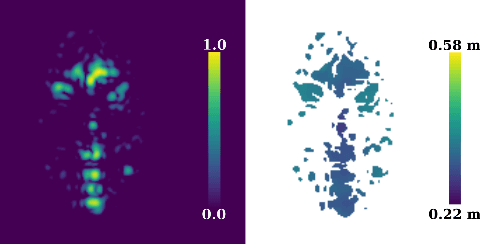
The 3D reconstruction of faces gains wide attention in computer vision and is used in many fields of application, for example, animation, virtual reality, and even forensics. This work is motivated by monitoring patients in sleep laboratories. Due to their unique characteristics, sensors from the radar domain have advantages compared to optical sensors, namely penetration of electrically non-conductive materials and independence of light. These advantages of radar signals unlock new applications and require adaptation of 3D reconstruction frameworks. We propose a novel model-based method for 3D reconstruction from radar images. We generate a dataset of synthetic radar images with a physics-based but non-differentiable radar renderer. This dataset is used to train a CNN-based encoder to estimate the parameters of a 3D morphable face model. Whilst the encoder alone already leads to strong reconstructions of synthetic data, we extend our reconstruction in an Analysis-by-Synthesis fashion to a model-based autoencoder. This is enabled by learning the rendering process in the decoder, which acts as an object-specific differentiable radar renderer. Subsequently, the combination of both network parts is trained to minimize both, the loss of the parameters and the loss of the resulting reconstructed radar image. This leads to the additional benefit, that at test time the parameters can be further optimized by finetuning the autoencoder unsupervised on the image loss. We evaluated our framework on generated synthetic face images as well as on real radar images with 3D ground truth of four individuals.
An Efficient yet High-Performance Method for Precise Radar-Based Imaging of Human Hand Poses
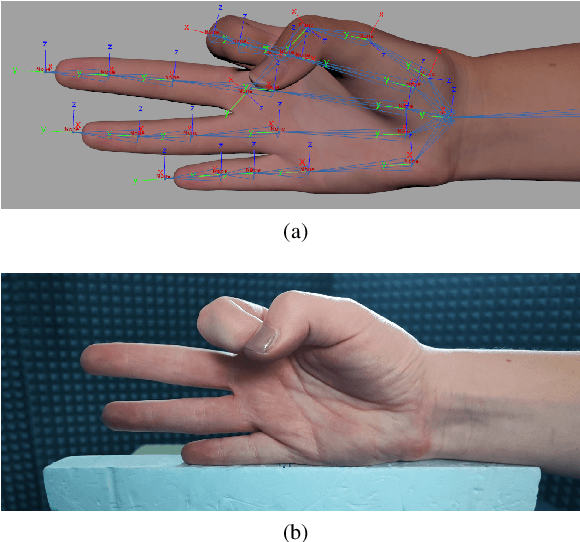
Jun 19, 2024Contactless hand pose estimation requires sensors that provide precise spatial information and low computational complexity for real-time processing. Unlike vision-based systems, radar offers lighting independence and direct motion assessments. Yet, there is limited research balancing real-time constraints, suitable frame rates for motion evaluations, and the need for precise 3D data. To address this, we extend the ultra-efficient two-tone hand imaging method from our prior work to a three-tone approach. Maintaining high frame rates and real-time constraints, this approach significantly enhances reconstruction accuracy and precision. We assess these measures by evaluating reconstruction results for different hand poses obtained by an imaging radar. Accuracy is assessed against ground truth from a spatially calibrated photogrammetry setup, while precision is measured using 3D-printed hand poses. The results emphasize the method's great potential for future radar-based hand sensing.
A Realistic Radar Ray Tracing Simulator for Hand Pose Imaging
Jul 28, 2023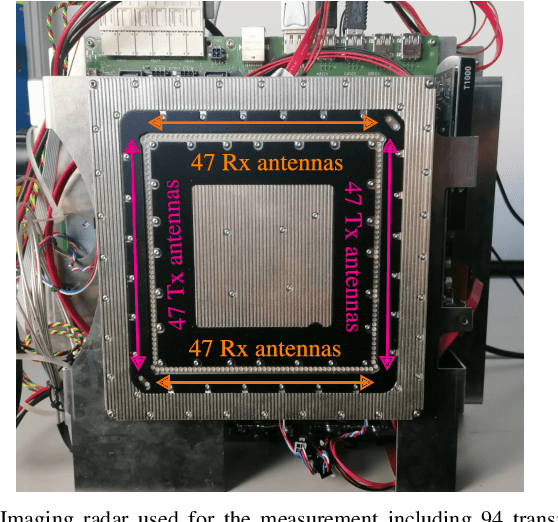
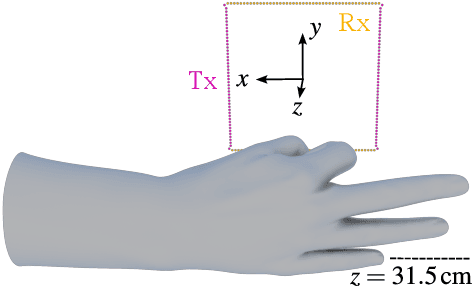
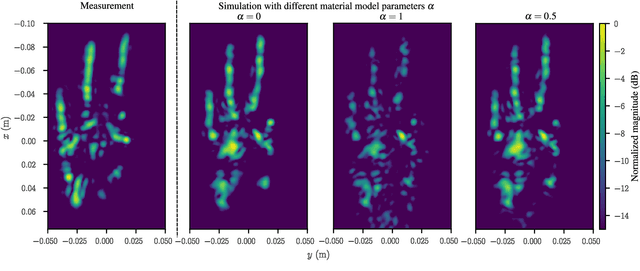
With the increasing popularity of human-computer interaction applications, there is also growing interest in generating sufficiently large and diverse data sets for automatic radar-based recognition of hand poses and gestures. Radar simulations are a vital approach to generating training data (e.g., for machine learning). Therefore, this work applies a ray tracing method to radar imaging of the hand. The performance of the proposed simulation approach is verified by a comparison of simulation and measurement data based on an imaging radar with a high lateral resolution. In addition, the surface material model incorporated into the ray tracer is highlighted in more detail and parameterized for radar hand imaging. Measurements and simulations show a very high similarity between synthetic and real radar image captures. The presented results demonstrate that it is possible to generate very realistic simulations of radar measurement data even for complex radar hand pose imaging systems.
A Novel Antenna Placement Algorithm for Compressive Sensing MIMO Radar
Oct 24, 2022In colocated compressive sensing MIMO radar, the measurement matrix is specified by antenna placement. To guarantee an acceptable recovery performance, this measurement matrix should satisfy certain properties, e.g., a small coherence. Prior work in the literature often employs randomized placement algorithms which optimize the prior distribution of antenna locations. The performance of these algorithms is suboptimal, as they can be easily enhanced via expurgation. In this paper, we suggest an iterative antenna placement algorithm which determines the antenna locations deterministically. The proposed algorithm locates jointly the antenna elements on the transmit and receive arrays, such that the coherence of the resulting measurement matrix is minimized. Numerical simulations demonstrate that the proposed algorithm outperforms significantly the benchmark, even after expurgation.