 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBone Surface Reconstruction and Clinical Features Estimation from Sparse Landmarks and Statistical Shape Models: A feasibility study on the femur
Jul 07, 2021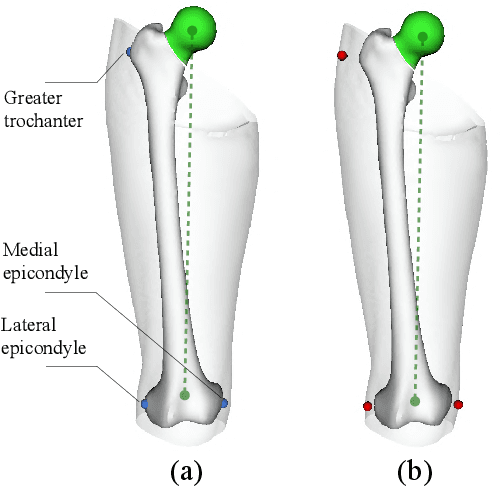
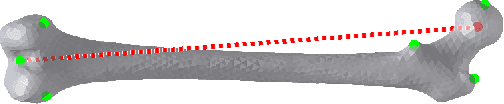

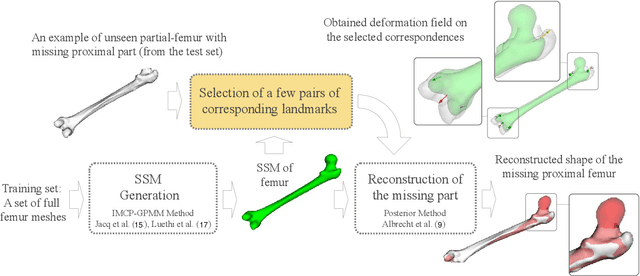
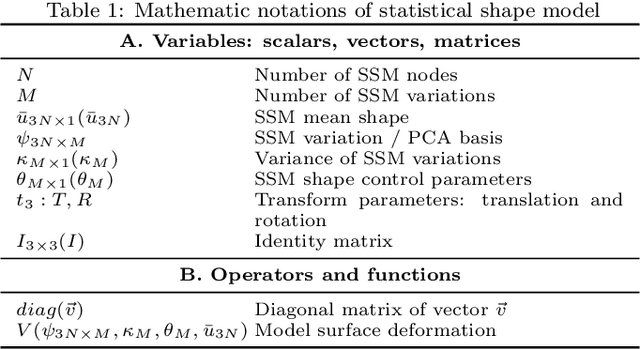
In this study, we investigated a method allowing the determination of the femur bone surface as well as its mechanical axis from some easy-to-identify bony landmarks. The reconstruction of the whole femur is therefore performed from these landmarks using a Statistical Shape Model (SSM). The aim of this research is therefore to assess the impact of the number, the position, and the accuracy of the landmarks for the reconstruction of the femur and the determination of its related mechanical axis, an important clinical parameter to consider for the lower limb analysis. Two statistical femur models were created from our in-house dataset and a publicly available dataset. Both were evaluated in terms of average point-to-point surface distance error and through the mechanical axis of the femur. Furthermore, the clinical impact of using landmarks on the skin in replacement of bony landmarks is investigated. The predicted proximal femurs from bony landmarks were more accurate compared to on-skin landmarks while both had less than 3.5 degrees mechanical axis angle deviation error. The results regarding the non-invasive determination of the mechanical axis are very encouraging and could open very interesting clinical perspectives for the analysis of the lower limb either for orthopedics or functional rehabilitation.
A weakly supervised registration-based framework for prostate segmentation via the combination of statistical shape model and CNN
Jul 30, 2020
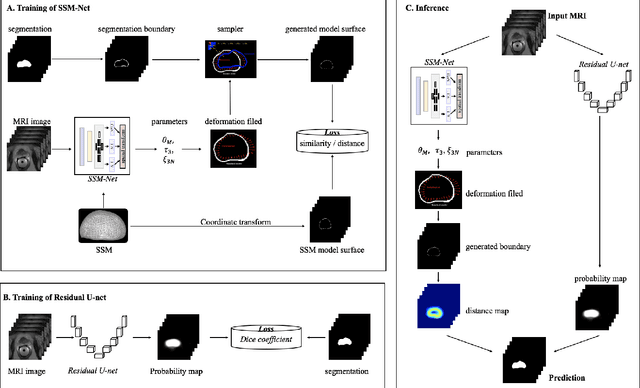

Precise determination of target is an essential procedure in prostate interventions, such as the prostate biopsy, lesion detection and targeted therapy. However, the prostate delineation may be tough in some cases due to tissue ambiguity or lack of partial anatomical boundary. To address this problem, we proposed a weakly supervised registration-based framework for the precise prostate segmentation, by combining convolutional neural network (CNN) with statistical shape model (SSM). To obtain the prostate region, an inception-based neural network (SSM-Net) was firstly exploited to predict the model transform, shape control parameters and a fine-tuning vector, for the generation of prostate boundary. According to the inferred boundary, a normalized distance map was calculated. Then, a residual U-net (ResU-Net) was employed to predict a probability label map from the input images. Finally, the average of the distance map and the probability map was regarded as the prostate segmentation. After that, two public dataset PROMISE12 and NCI- ISBI 2013 were utilized for the model computation and for the network training and testing. The validation results demonstrate that the segmentation framework using a SSM with 9500 nodes achieved the best performance, with a dice of 0.904 and an average surface distance of 1.88 mm. In addition, we verified the impact of model elasticity augmentation and fine-tuning item on the network segmentation capability. As a result, both factors have improved the delineation accuracy, with dice increased by 10% and 7% respectively. In conclusion, via the combination of two weakly supervised neural networks, our segmentation method might be an effective and robust approach for prostate segmentation.
First Clinical Experience in Urologic Surgery with a Novel Robotic Lightweight Laparoscope Holder
Aug 31, 2012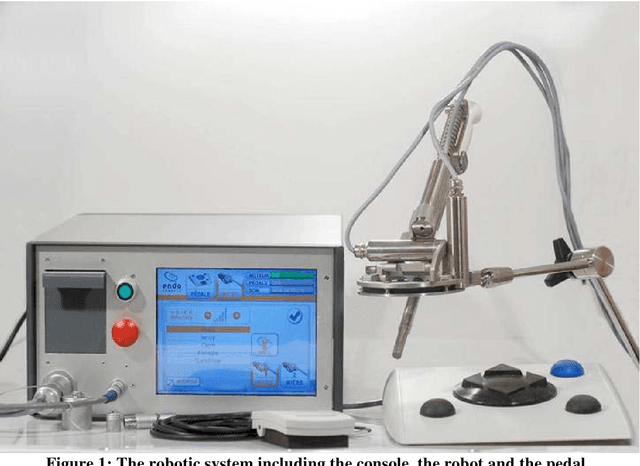
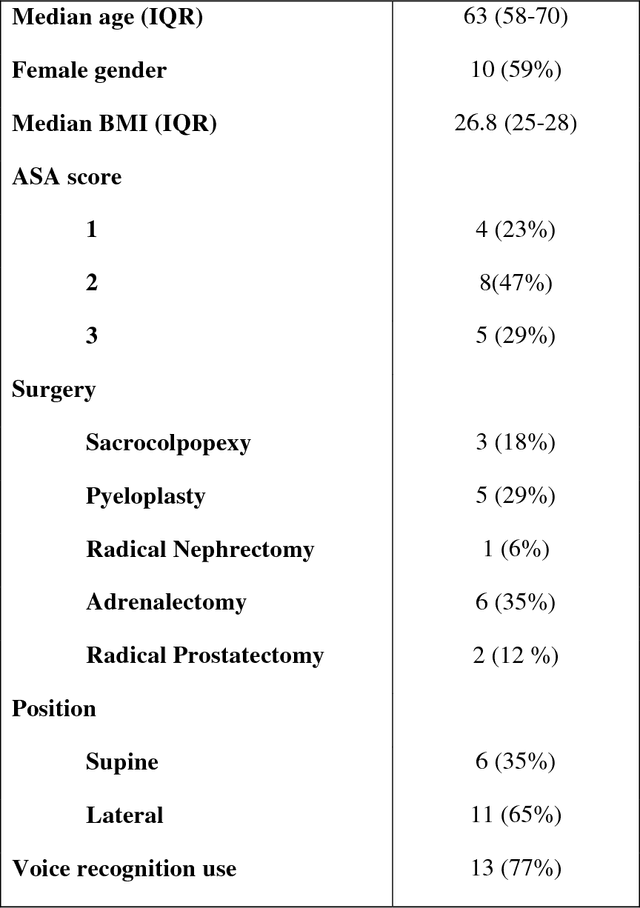


Purpose: To report the feasibility and the safety of a surgeon-controlled robotic endoscope holder in laparoscopic surgery. Materials and methods: From March 2010 to September 2010, 20 patients were enrolled prospectively to undergo a laparoscopic surgery using an innovative robotic endoscope holder. Two surgeons performed 6 adrenalectomies, 4 sacrocolpopexies, 5 pyeloplasties, 4 radical prostatectomies and 1 radical nephrectomy. Demographic data, overall set-up time, operative time, number of assistants needed were reviewed. Surgeon's satisfaction regarding the ergonomics was assessed using a ten point scale. Postoperative clinical outcomes were reviewed at day 1 and 1 month postoperatively. Results: The per-protocol analysis was performed on 17 patients for whom the robot was effectively used for surgery. Median age was 63 years, 10 patients were female (59%). Median BMI was 26.8. Surgical procedures were completed with the robot in 12 cases (71 %). Median number of surgical assistant was 0. Overall set-up time with the robot was 19 min, operative time was 130 min) during which the robot was used 71% of the time. Mean hospital stay was 6.94 days $\pm$ 2.3. Median score regarding the easiness of use was 7. Median pain level was 1.5/10 at day 1 and 0 at 1 month postoperatively. Open conversion was needed in 1 case (6 %) and 4 minor complications occurred in 2 patients (12%). Conclusion: This use of this novel robotic laparoscope holder is safe, feasible and it provides a good comfort to the surgeon.
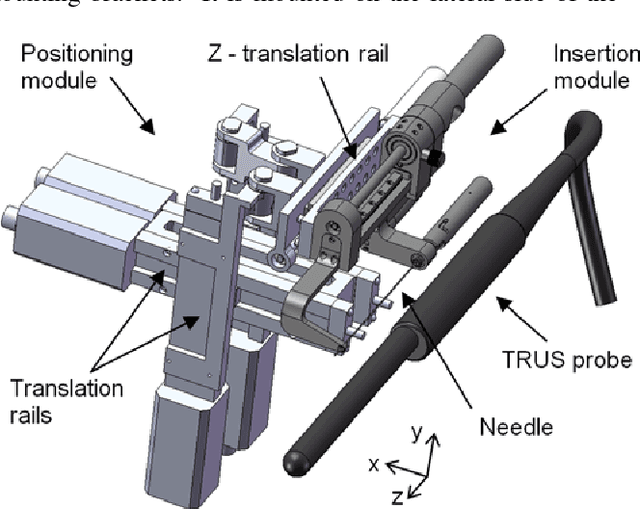
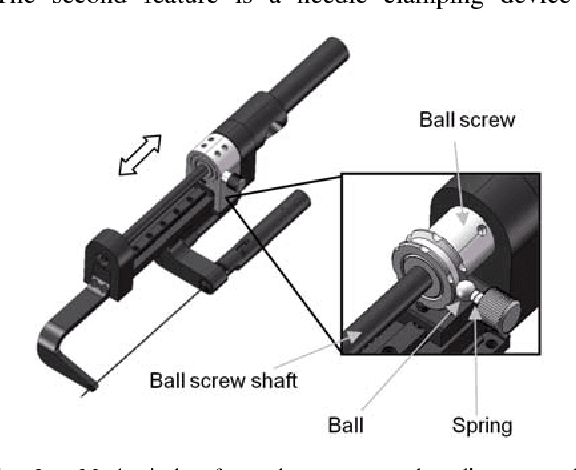
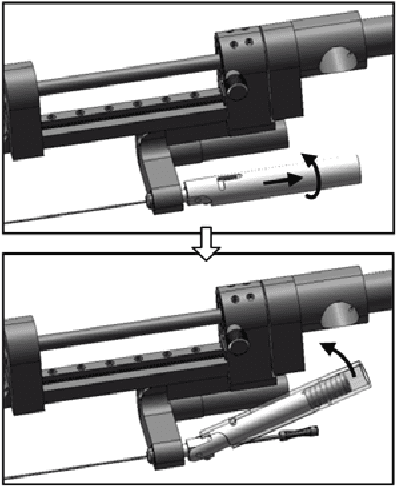
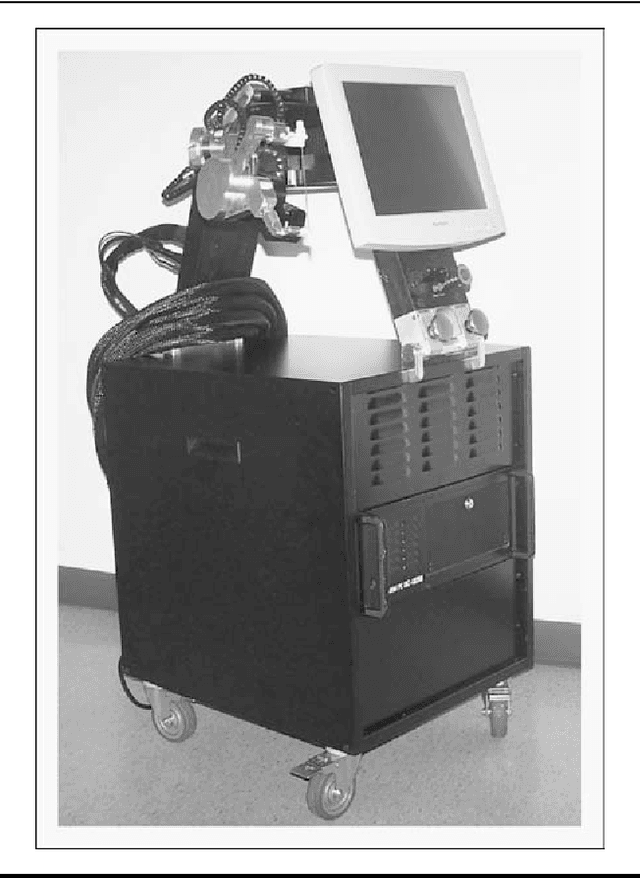
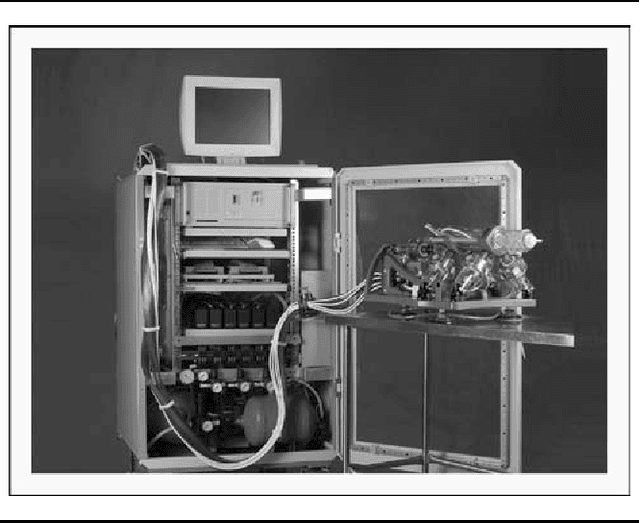
Development of a Novel Robot for Transperineal Needle Based Interventions: Focal Therapy, Brachytherapy and Prostate Biopsies
Aug 31, 2012
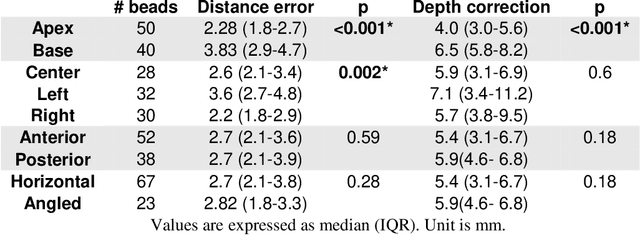
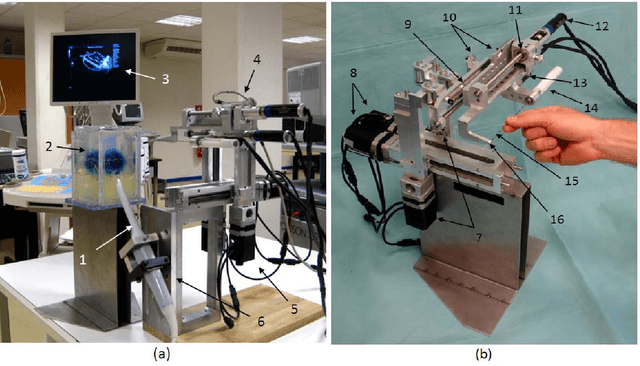

Purpose: We report what is to our knowledge the initial experience with a new 3-dimensional ultrasound robotic system for prostate brachytherapy assistance, focal therapy and prostate biopsies. Its ability to track prostate motion intraoperatively allows it to manage motions and guide needles to predefined targets. Materials and Methods: A robotic system was created for transrectal ultrasound guided needle implantation combined with intraoperative prostate tracking. Experiments were done on 90 targets embedded in a total of 9 mobile, deformable, synthetic prostate phantoms. Experiments involved trying to insert glass beads as close as possible to targets in multimodal anthropomorphic imaging phantoms. Results were measured by segmenting the inserted beads in computerized tomography volumes of the phantoms. Results: The robot reached the chosen targets in phantoms with a median accuracy of 2.73 mm and a median prostate motion of 5.46 mm. Accuracy was better at the apex than at the base (2.28 vs 3.83 mm, p <0.001), and similar for horizontal and angled needle inclinations (2.7 vs 2.82 mm, p = 0.18). Conclusions: To our knowledge this robot for prostate focal therapy, brachytherapy and targeted prostate biopsies is the first system to use intraoperative prostate motion tracking to guide needles into the prostate. Preliminary experiments show its ability to reach targets despite prostate motion.
Prostate biopsy tracking with deformation estimation
Jul 07, 2011
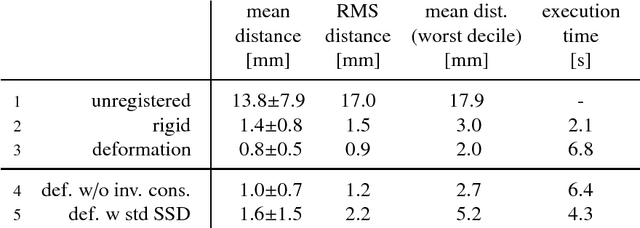

Transrectal biopsies under 2D ultrasound (US) control are the current clinical standard for prostate cancer diagnosis. The isoechogenic nature of prostate carcinoma makes it necessary to sample the gland systematically, resulting in a low sensitivity. Also, it is difficult for the clinician to follow the sampling protocol accurately under 2D US control and the exact anatomical location of the biopsy cores is unknown after the intervention. Tracking systems for prostate biopsies make it possible to generate biopsy distribution maps for intra- and post-interventional quality control and 3D visualisation of histological results for diagnosis and treatment planning. They can also guide the clinician toward non-ultrasound targets. In this paper, a volume-swept 3D US based tracking system for fast and accurate estimation of prostate tissue motion is proposed. The entirely image-based system solves the patient motion problem with an a priori model of rectal probe kinematics. Prostate deformations are estimated with elastic registration to maximize accuracy. The system is robust with only 17 registration failures out of 786 (2%) biopsy volumes acquired from 47 patients during biopsy sessions. Accuracy was evaluated to 0.76$\pm$0.52mm using manually segmented fiducials on 687 registered volumes stemming from 40 patients. A clinical protocol for assisted biopsy acquisition was designed and implemented as a biopsy assistance system, which allows to overcome the draw-backs of the standard biopsy procedure.
Prosper: image and robot-guided prostate brachytherapy
Apr 08, 2011

Brachytherapy for localized prostate cancer consists in destroying cancer by introducing iodine radioactive seeds into the gland through hollow needles. The planning of the position of the seeds and their introduction into the prostate is based on intra-operative ultrasound (US) imaging. We propose to optimize the global quality of the procedure by: i) using 3D US; ii) enhancing US data with MRI registration; iii) using a specially designed needle-insertion robot, connected to the imaging data. The imaging methods have been successfully tested on patient data while the robot accuracy has been evaluated on a realistic deformable phantom.
Design of an ultrasound-guided robotic brachytherapy needle insertion system
Sep 14, 2009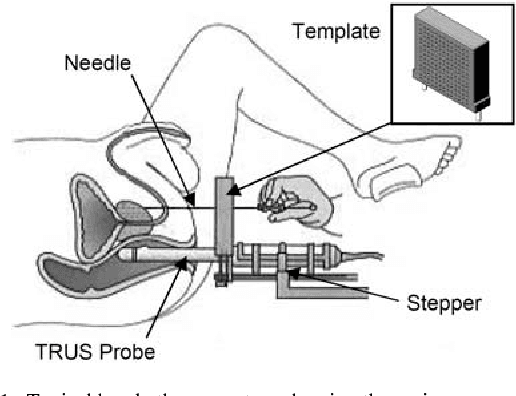
In this paper we describe a new robotic brachytherapy needle-insertion system that is designed to replace the template used in the manual technique. After a brief review of existing robotic systems, we describe the requirements that we based our design upon. A detailed description of the proposed system follows. Our design is capable of positioning and inclining a needle within the same workspace as the manual template. To help improve accuracy, the needle can be rotated about its axis during insertion into the prostate. The system can be mounted on existing steppers and also easily accommodates existing seed dispensers, such as the Mick Applicator.
Computer- and robot-assisted Medical Intervention
Mar 26, 2009
Medical robotics includes assistive devices used by the physician in order to make his/her diagnostic or therapeutic practices easier and more efficient. This chapter focuses on such systems. It introduces the general field of Computer-Assisted Medical Interventions, its aims, its different components and describes the place of robots in that context. The evolutions in terms of general design and control paradigms in the development of medical robots are presented and issues specific to that application domain are discussed. A view of existing systems, on-going developments and future trends is given. A case-study is detailed. Other types of robotic help in the medical environment (such as for assisting a handicapped person, for rehabilitation of a patient or for replacement of some damaged/suppressed limbs or organs) are out of the scope of this chapter.
* Handbook of Automation, Shimon Nof (Ed.) (2009) 000-000
BiopSym: a simulator for enhanced learning of ultrasound-guided prostate biopsy
Dec 17, 2008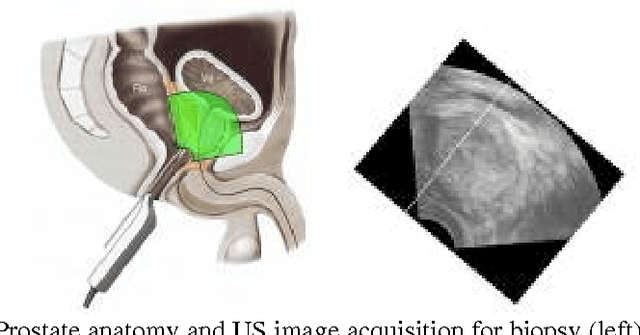

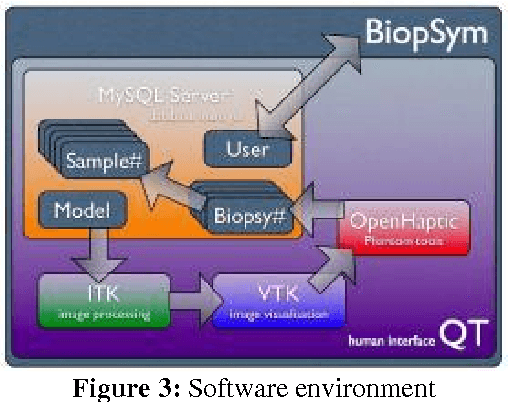

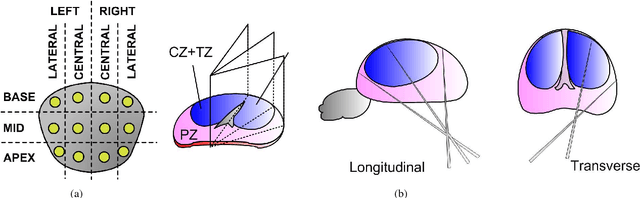
This paper describes a simulator of ultrasound-guided prostate biopsies for cancer diagnosis. When performing biopsy series, the clinician has to move the ultrasound probe and to mentally integrate the real-time bi-dimensional images into a three-dimensional (3D) representation of the anatomical environment. Such a 3D representation is necessary to sample regularly the prostate in order to maximize the probability of detecting a cancer if any. To make the training of young physicians easier and faster we developed a simulator that combines images computed from three-dimensional ultrasound recorded data to haptic feedback. The paper presents the first version of this simulator.
Urologic robots and future directions
Dec 12, 2008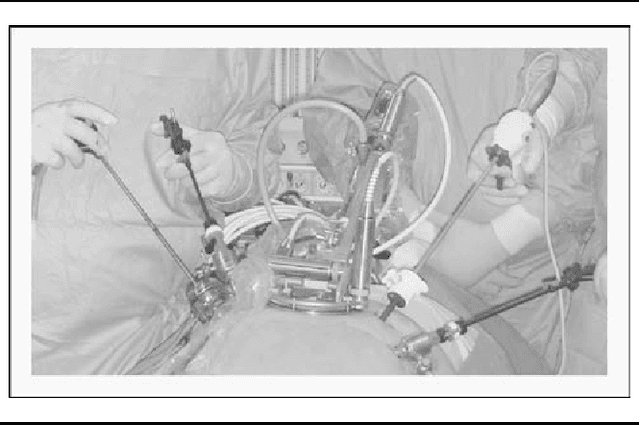
PURPOSE OF REVIEW: Robot-assisted laparoscopic surgery in urology has gained immense popularity with the daVinci system, but a lot of research teams are working on new robots. The purpose of this study is to review current urologic robots and present future development directions. RECENT FINDINGS: Future systems are expected to advance in two directions: improvements of remote manipulation robots and developments of image-guided robots. SUMMARY: The final goal of robots is to allow safer and more homogeneous outcomes with less variability of surgeon performance, as well as new tools to perform tasks on the basis of medical transcutaneous imaging, in a less invasive way, at lower costs. It is expected that improvements for a remote system could be augmented in reality, with haptic feedback, size reduction, and development of new tools for natural orifice translumenal endoscopic surgery. The paradigm of image-guided robots is close to clinical availability and the most advanced robots are presented with end-user technical assessments. It is also notable that the potential of robots lies much further ahead than the accomplishments of the daVinci system. The integration of imaging with robotics holds a substantial promise, because this can accomplish tasks otherwise impossible. Image-guided robots have the potential to offer a paradigm shift.