 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProstate biopsy tracking with deformation estimation
Jul 07, 2011
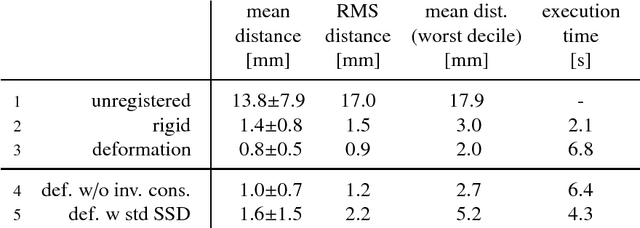
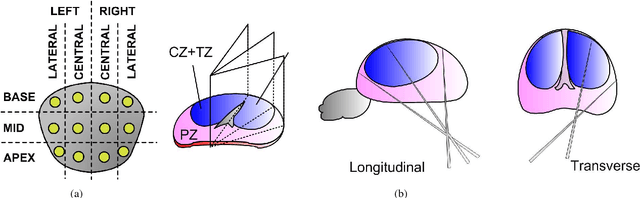

Transrectal biopsies under 2D ultrasound (US) control are the current clinical standard for prostate cancer diagnosis. The isoechogenic nature of prostate carcinoma makes it necessary to sample the gland systematically, resulting in a low sensitivity. Also, it is difficult for the clinician to follow the sampling protocol accurately under 2D US control and the exact anatomical location of the biopsy cores is unknown after the intervention. Tracking systems for prostate biopsies make it possible to generate biopsy distribution maps for intra- and post-interventional quality control and 3D visualisation of histological results for diagnosis and treatment planning. They can also guide the clinician toward non-ultrasound targets. In this paper, a volume-swept 3D US based tracking system for fast and accurate estimation of prostate tissue motion is proposed. The entirely image-based system solves the patient motion problem with an a priori model of rectal probe kinematics. Prostate deformations are estimated with elastic registration to maximize accuracy. The system is robust with only 17 registration failures out of 786 (2%) biopsy volumes acquired from 47 patients during biopsy sessions. Accuracy was evaluated to 0.76$\pm$0.52mm using manually segmented fiducials on 687 registered volumes stemming from 40 patients. A clinical protocol for assisted biopsy acquisition was designed and implemented as a biopsy assistance system, which allows to overcome the draw-backs of the standard biopsy procedure.
BiopSym: a simulator for enhanced learning of ultrasound-guided prostate biopsy
Dec 17, 2008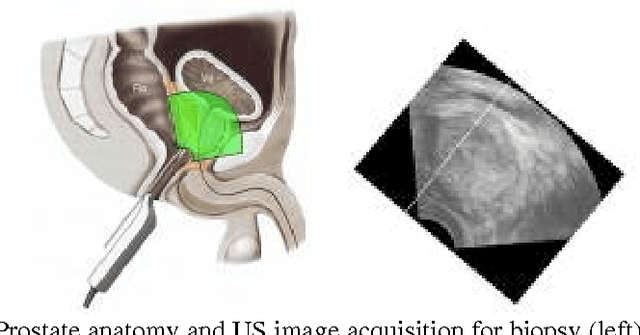

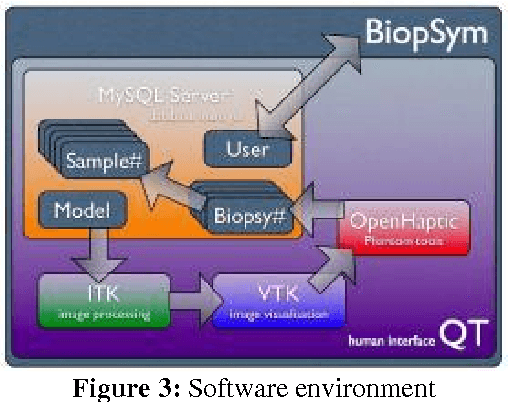

This paper describes a simulator of ultrasound-guided prostate biopsies for cancer diagnosis. When performing biopsy series, the clinician has to move the ultrasound probe and to mentally integrate the real-time bi-dimensional images into a three-dimensional (3D) representation of the anatomical environment. Such a 3D representation is necessary to sample regularly the prostate in order to maximize the probability of detecting a cancer if any. To make the training of young physicians easier and faster we developed a simulator that combines images computed from three-dimensional ultrasound recorded data to haptic feedback. The paper presents the first version of this simulator.
Urologic robots and future directions
Dec 12, 2008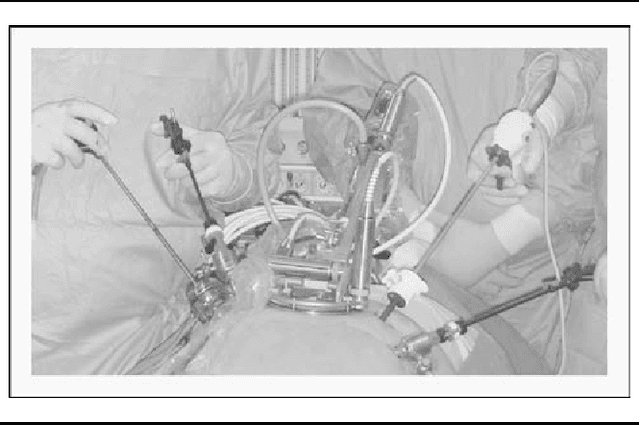
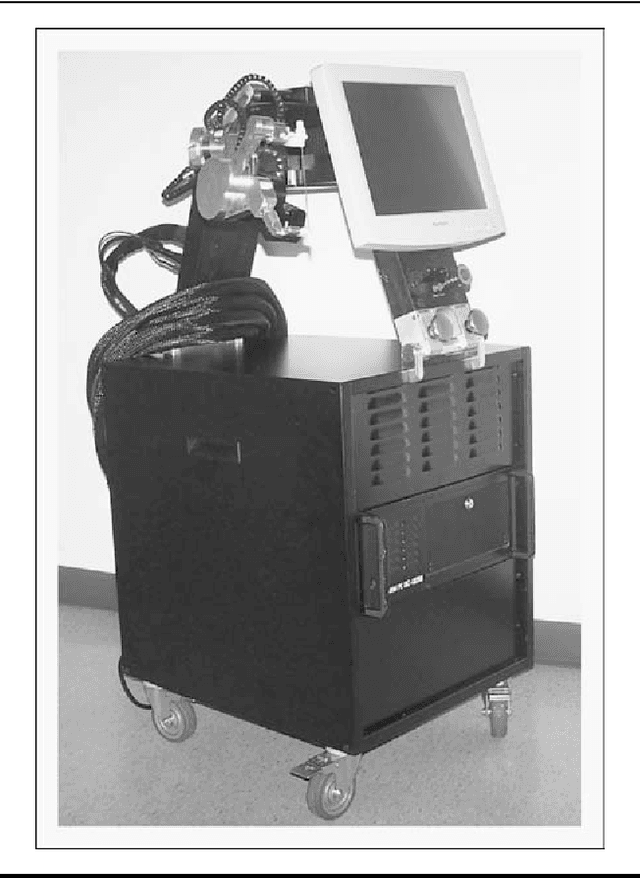
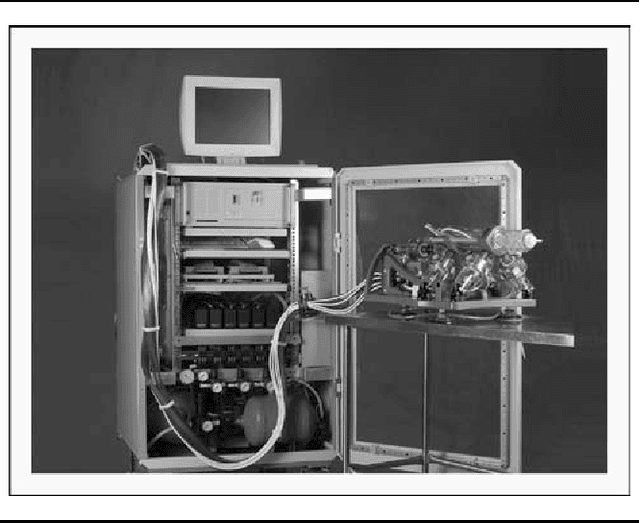
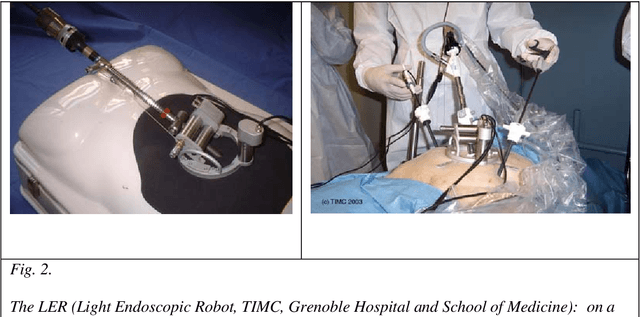
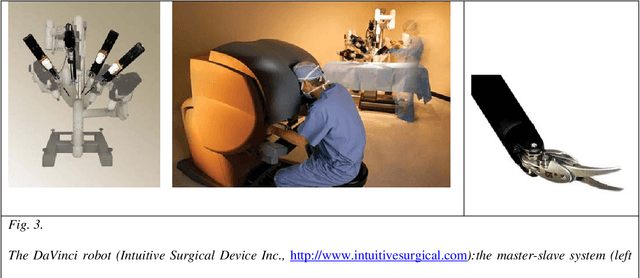
PURPOSE OF REVIEW: Robot-assisted laparoscopic surgery in urology has gained immense popularity with the daVinci system, but a lot of research teams are working on new robots. The purpose of this study is to review current urologic robots and present future development directions. RECENT FINDINGS: Future systems are expected to advance in two directions: improvements of remote manipulation robots and developments of image-guided robots. SUMMARY: The final goal of robots is to allow safer and more homogeneous outcomes with less variability of surgeon performance, as well as new tools to perform tasks on the basis of medical transcutaneous imaging, in a less invasive way, at lower costs. It is expected that improvements for a remote system could be augmented in reality, with haptic feedback, size reduction, and development of new tools for natural orifice translumenal endoscopic surgery. The paradigm of image-guided robots is close to clinical availability and the most advanced robots are presented with end-user technical assessments. It is also notable that the potential of robots lies much further ahead than the accomplishments of the daVinci system. The integration of imaging with robotics holds a substantial promise, because this can accomplish tasks otherwise impossible. Image-guided robots have the potential to offer a paradigm shift.
Medical image computing and computer-aided medical interventions applied to soft tissues. Work in progress in urology
Dec 13, 2007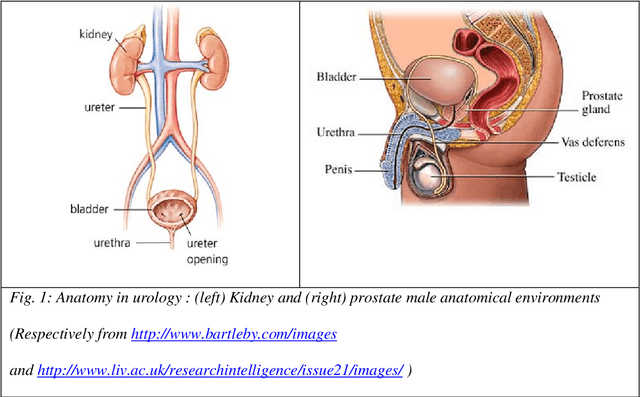

Until recently, Computer-Aided Medical Interventions (CAMI) and Medical Robotics have focused on rigid and non deformable anatomical structures. Nowadays, special attention is paid to soft tissues, raising complex issues due to their mobility and deformation. Mini-invasive digestive surgery was probably one of the first fields where soft tissues were handled through the development of simulators, tracking of anatomical structures and specific assistance robots. However, other clinical domains, for instance urology, are concerned. Indeed, laparoscopic surgery, new tumour destruction techniques (e.g. HIFU, radiofrequency, or cryoablation), increasingly early detection of cancer, and use of interventional and diagnostic imaging modalities, recently opened new challenges to the urologist and scientists involved in CAMI. This resulted in the last five years in a very significant increase of research and developments of computer-aided urology systems. In this paper, we propose a description of the main problems related to computer-aided diagnostic and therapy of soft tissues and give a survey of the different types of assistance offered to the urologist: robotization, image fusion, surgical navigation. Both research projects and operational industrial systems are discussed.