 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProsper: image and robot-guided prostate brachytherapy
Apr 08, 2011

Brachytherapy for localized prostate cancer consists in destroying cancer by introducing iodine radioactive seeds into the gland through hollow needles. The planning of the position of the seeds and their introduction into the prostate is based on intra-operative ultrasound (US) imaging. We propose to optimize the global quality of the procedure by: i) using 3D US; ii) enhancing US data with MRI registration; iii) using a specially designed needle-insertion robot, connected to the imaging data. The imaging methods have been successfully tested on patient data while the robot accuracy has been evaluated on a realistic deformable phantom.
Medical image computing and computer-aided medical interventions applied to soft tissues. Work in progress in urology
Dec 13, 2007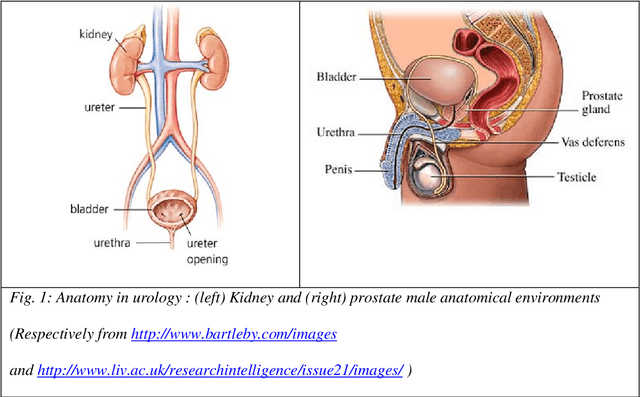
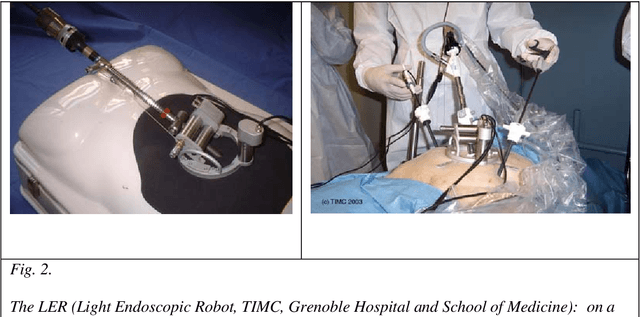
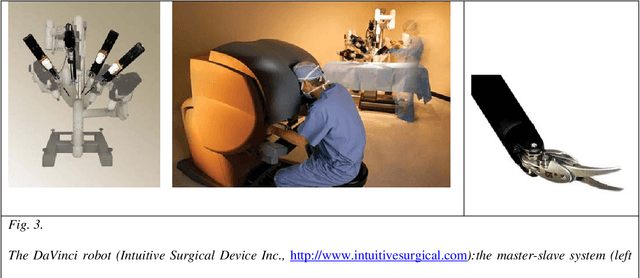

Until recently, Computer-Aided Medical Interventions (CAMI) and Medical Robotics have focused on rigid and non deformable anatomical structures. Nowadays, special attention is paid to soft tissues, raising complex issues due to their mobility and deformation. Mini-invasive digestive surgery was probably one of the first fields where soft tissues were handled through the development of simulators, tracking of anatomical structures and specific assistance robots. However, other clinical domains, for instance urology, are concerned. Indeed, laparoscopic surgery, new tumour destruction techniques (e.g. HIFU, radiofrequency, or cryoablation), increasingly early detection of cancer, and use of interventional and diagnostic imaging modalities, recently opened new challenges to the urologist and scientists involved in CAMI. This resulted in the last five years in a very significant increase of research and developments of computer-aided urology systems. In this paper, we propose a description of the main problems related to computer-aided diagnostic and therapy of soft tissues and give a survey of the different types of assistance offered to the urologist: robotization, image fusion, surgical navigation. Both research projects and operational industrial systems are discussed.