 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFirst Clinical Experience in Urologic Surgery with a Novel Robotic Lightweight Laparoscope Holder
Aug 31, 2012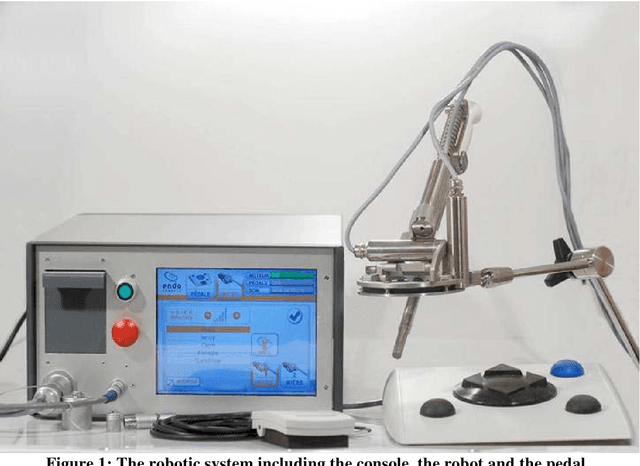
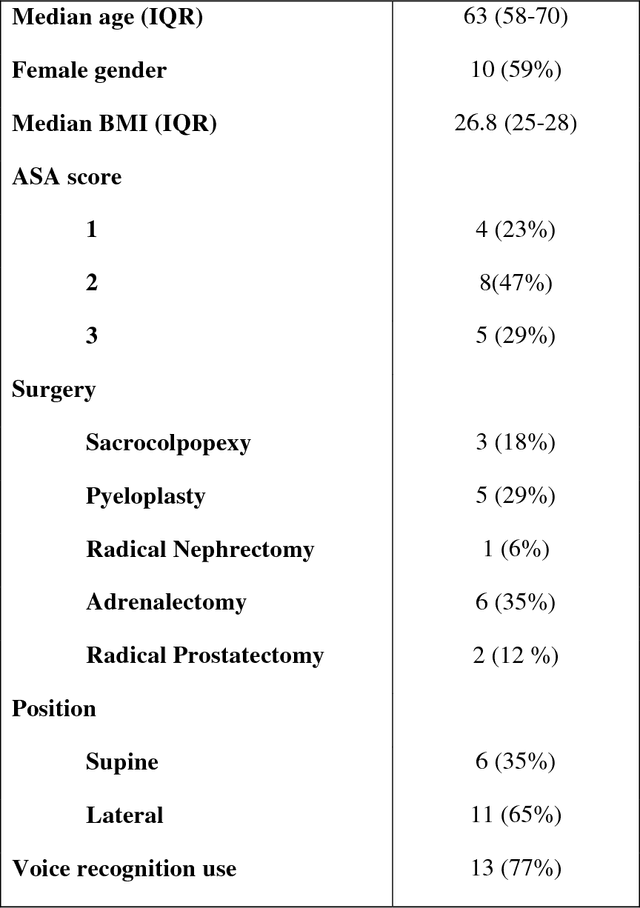


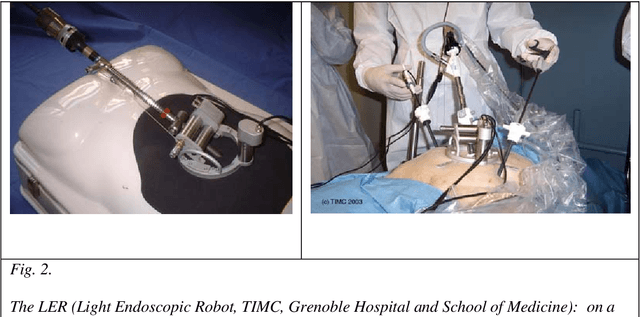
Purpose: To report the feasibility and the safety of a surgeon-controlled robotic endoscope holder in laparoscopic surgery. Materials and methods: From March 2010 to September 2010, 20 patients were enrolled prospectively to undergo a laparoscopic surgery using an innovative robotic endoscope holder. Two surgeons performed 6 adrenalectomies, 4 sacrocolpopexies, 5 pyeloplasties, 4 radical prostatectomies and 1 radical nephrectomy. Demographic data, overall set-up time, operative time, number of assistants needed were reviewed. Surgeon's satisfaction regarding the ergonomics was assessed using a ten point scale. Postoperative clinical outcomes were reviewed at day 1 and 1 month postoperatively. Results: The per-protocol analysis was performed on 17 patients for whom the robot was effectively used for surgery. Median age was 63 years, 10 patients were female (59%). Median BMI was 26.8. Surgical procedures were completed with the robot in 12 cases (71 %). Median number of surgical assistant was 0. Overall set-up time with the robot was 19 min, operative time was 130 min) during which the robot was used 71% of the time. Mean hospital stay was 6.94 days $\pm$ 2.3. Median score regarding the easiness of use was 7. Median pain level was 1.5/10 at day 1 and 0 at 1 month postoperatively. Open conversion was needed in 1 case (6 %) and 4 minor complications occurred in 2 patients (12%). Conclusion: This use of this novel robotic laparoscope holder is safe, feasible and it provides a good comfort to the surgeon.
TER: A Robot for Remote Ultrasonic Examination: Experimental Evaluations
Jan 28, 2008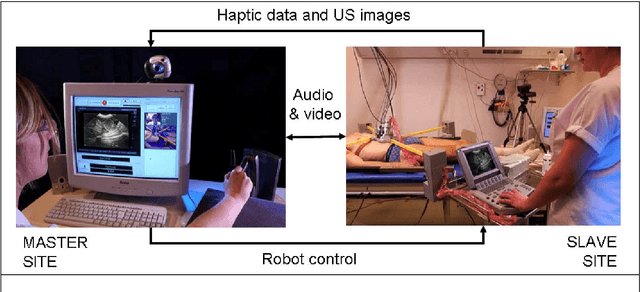
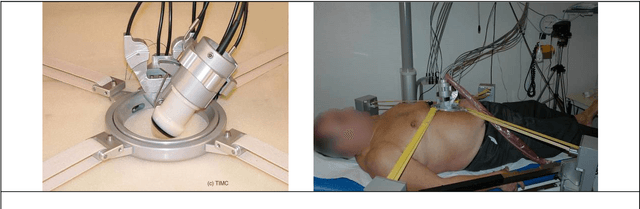
This chapter: o Motivates the clinical use of robotic tele-echography o Introduces the TER system o Describes technical and clinical evaluations performed with TER
Medical image computing and computer-aided medical interventions applied to soft tissues. Work in progress in urology
Dec 13, 2007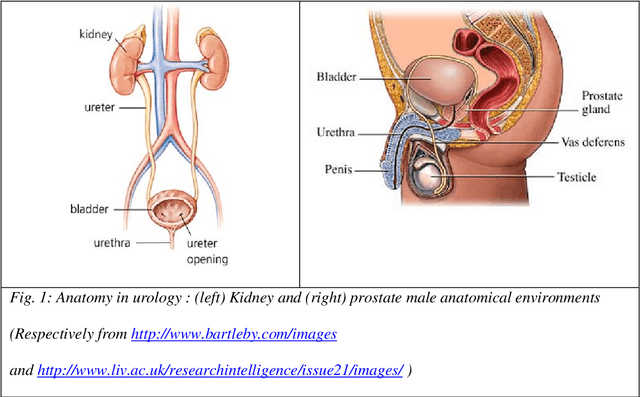

Until recently, Computer-Aided Medical Interventions (CAMI) and Medical Robotics have focused on rigid and non deformable anatomical structures. Nowadays, special attention is paid to soft tissues, raising complex issues due to their mobility and deformation. Mini-invasive digestive surgery was probably one of the first fields where soft tissues were handled through the development of simulators, tracking of anatomical structures and specific assistance robots. However, other clinical domains, for instance urology, are concerned. Indeed, laparoscopic surgery, new tumour destruction techniques (e.g. HIFU, radiofrequency, or cryoablation), increasingly early detection of cancer, and use of interventional and diagnostic imaging modalities, recently opened new challenges to the urologist and scientists involved in CAMI. This resulted in the last five years in a very significant increase of research and developments of computer-aided urology systems. In this paper, we propose a description of the main problems related to computer-aided diagnostic and therapy of soft tissues and give a survey of the different types of assistance offered to the urologist: robotization, image fusion, surgical navigation. Both research projects and operational industrial systems are discussed.