 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline identification of surgical deviations in laparoscopic rectopexy
Sep 24, 2019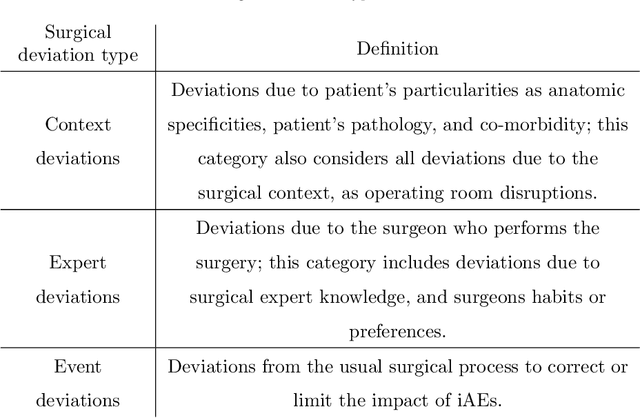
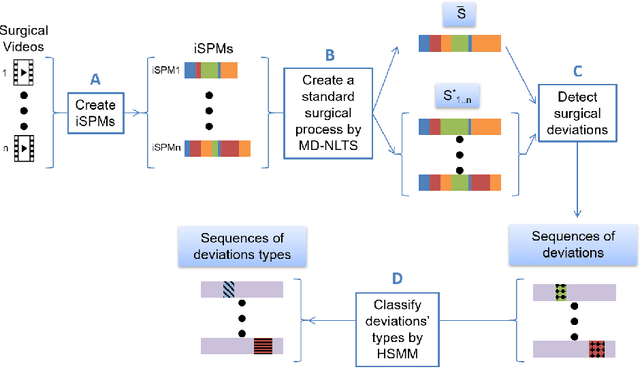
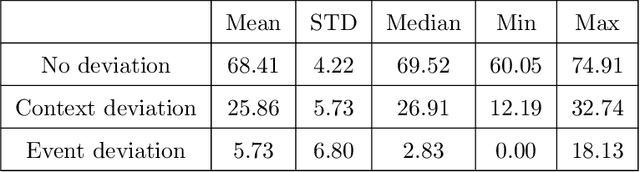
Objective: A median of 14.4% of patient undergone at least one adverse event during surgery and a third of them are preventable. The occurrence of adverse events forces surgeons to implement corrective strategies and, thus, deviate from the standard surgical process. Therefore, it is clear that the automatic identification of adverse events is a major challenge for patient safety. In this paper, we have proposed a method enabling us to identify such deviations. We have focused on identifying surgeons' deviations from standard surgical processes due to surgical events rather than anatomic specificities. This is particularly challenging, given the high variability in typical surgical procedure workflows. Methods: We have introduced a new approach designed to automatically detect and distinguish surgical process deviations based on multi-dimensional non-linear temporal scaling with a hidden semi-Markov model using manual annotation of surgical processes. The approach was then evaluated using cross-validation. Results: The best results have over 90% accuracy. Recall and precision were superior at 70%. We have provided a detailed analysis of the incorrectly-detected observations. Conclusion: Multi-dimensional non-linear temporal scaling with a hidden semi-Markov model provides promising results for detecting deviations. Our error analysis of the incorrectly-detected observations offers different leads in order to further improve our method. Significance: Our method demonstrated the feasibility of automatically detecting surgical deviations that could be implemented for both skill analysis and developing situation awareness-based computer-assisted surgical systems.
First Clinical Experience in Urologic Surgery with a Novel Robotic Lightweight Laparoscope Holder
Aug 31, 2012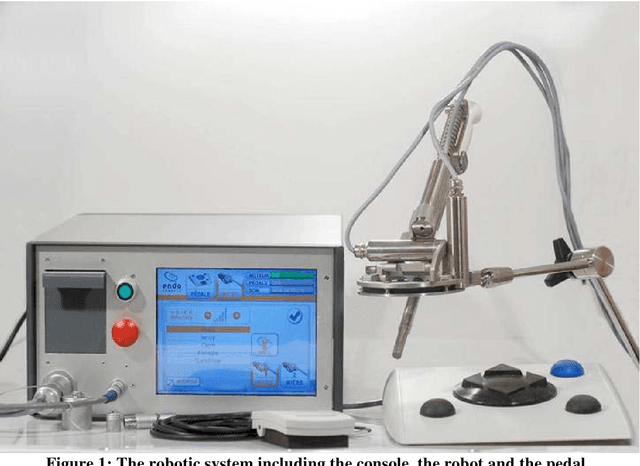
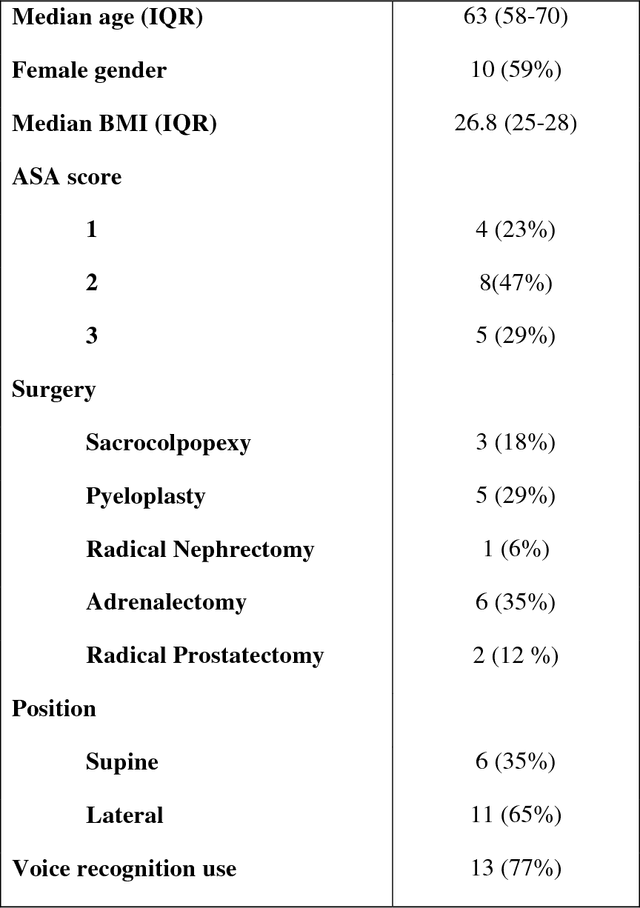


Purpose: To report the feasibility and the safety of a surgeon-controlled robotic endoscope holder in laparoscopic surgery. Materials and methods: From March 2010 to September 2010, 20 patients were enrolled prospectively to undergo a laparoscopic surgery using an innovative robotic endoscope holder. Two surgeons performed 6 adrenalectomies, 4 sacrocolpopexies, 5 pyeloplasties, 4 radical prostatectomies and 1 radical nephrectomy. Demographic data, overall set-up time, operative time, number of assistants needed were reviewed. Surgeon's satisfaction regarding the ergonomics was assessed using a ten point scale. Postoperative clinical outcomes were reviewed at day 1 and 1 month postoperatively. Results: The per-protocol analysis was performed on 17 patients for whom the robot was effectively used for surgery. Median age was 63 years, 10 patients were female (59%). Median BMI was 26.8. Surgical procedures were completed with the robot in 12 cases (71 %). Median number of surgical assistant was 0. Overall set-up time with the robot was 19 min, operative time was 130 min) during which the robot was used 71% of the time. Mean hospital stay was 6.94 days $\pm$ 2.3. Median score regarding the easiness of use was 7. Median pain level was 1.5/10 at day 1 and 0 at 1 month postoperatively. Open conversion was needed in 1 case (6 %) and 4 minor complications occurred in 2 patients (12%). Conclusion: This use of this novel robotic laparoscope holder is safe, feasible and it provides a good comfort to the surgeon.
TER: A Robot for Remote Ultrasonic Examination: Experimental Evaluations
Jan 28, 2008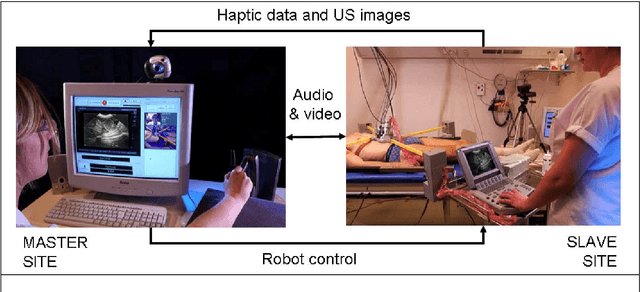
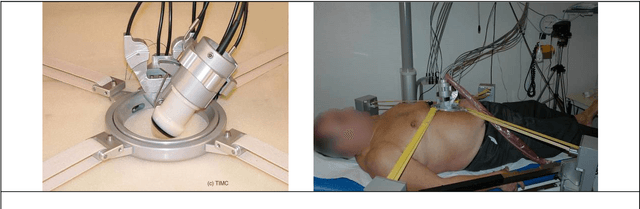
This chapter: o Motivates the clinical use of robotic tele-echography o Introduces the TER system o Describes technical and clinical evaluations performed with TER
Utilisation de la substitution sensorielle par électro-stimulation linguale pour la prévention des escarres chez les paraplégiques. Etude préliminaire
Jul 12, 2006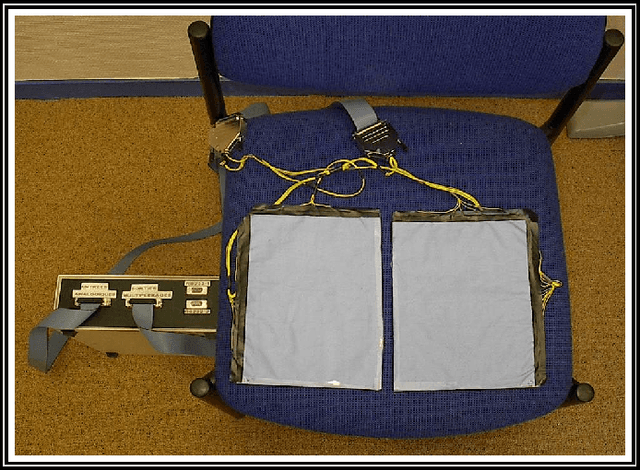
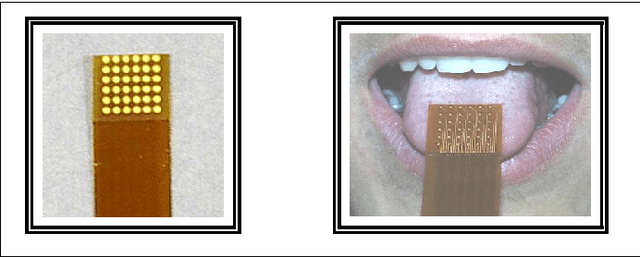
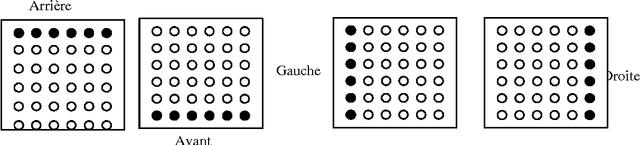
Pressure ulcers are recognized as a major health issue in individuals with spinal cord injuries and new approaches to prevent this pathology are necessary. An innovative health strategy is being developed through the use of computer and sensory substitution via the tongue in order to compensate for the sensory loss in the buttock area for individuals with paraplegia. This sensory compensation will enable individuals with spinal cord injuries to be aware of a localized excess of pressure at the skin/seat interface and, consequently, will enable them to prevent the formation of pressure ulcers by relieving the cutaneous area of suffering. This work reports an initial evaluation of this approach and the feasibility of creating an adapted behavior, with a change in pressure as a response to electro-stimulated information on the tongue. Obtained during a clinical study in 10 healthy seated subjects, the first results are encouraging, with 92% success in 100 performed tests. These results, which have to be completed and validated in the paraplegic population, may lead to a new approach to education in health to prevent the formation of pressure ulcers within this population. Keywords: Spinal Cord Injuries, Pressure Ulcer, Sensory Substitution, Health Education, Biomedical Informatics.