Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiopSym: a simulator for enhanced learning of ultrasound-guided prostate biopsy
Paper and Code
Dec 17, 2008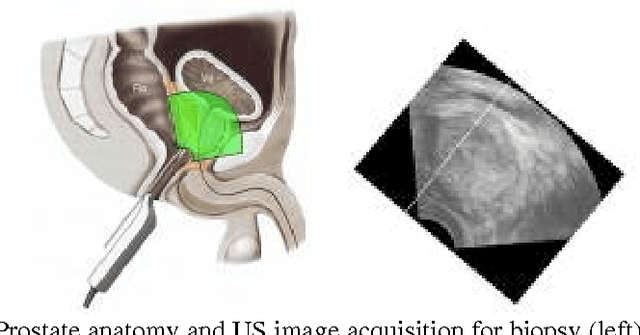


This paper describes a simulator of ultrasound-guided prostate biopsies for cancer diagnosis. When performing biopsy series, the clinician has to move the ultrasound probe and to mentally integrate the real-time bi-dimensional images into a three-dimensional (3D) representation of the anatomical environment. Such a 3D representation is necessary to sample regularly the prostate in order to maximize the probability of detecting a cancer if any. To make the training of young physicians easier and faster we developed a simulator that combines images computed from three-dimensional ultrasound recorded data to haptic feedback. The paper presents the first version of this simulator.
* Medecine Meets Virtual Reality, Los Angeles : \'Etats-Unis
d'Am\'erique (2009)
View paper on