 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to enhance learning of robotic surgery gestures? A tactile cue saliency investigation for 3D hand guidance
May 10, 2019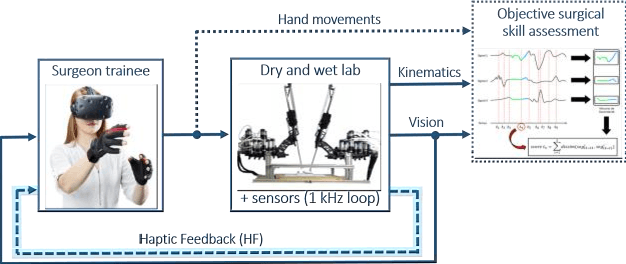
The current generation of surgeons requires extensive training in teleoperation to develop specific dexterous skills, which are independent of medical knowledge. Training curricula progress from manipulation tasks to simulated surgical tasks but are limited in time. To tackle this, we propose to integrate surgical robotic training together with Haptic Feedback (HF) to improve skill acquisition. This paper present the initial but promising results of our haptic device designed to support in the training of surgical gestures. Our ongoing work is related to integrate the HF in the RAVEN II platform.
Holdable Haptic Device for 4-DOF Motion Guidance
Mar 07, 2019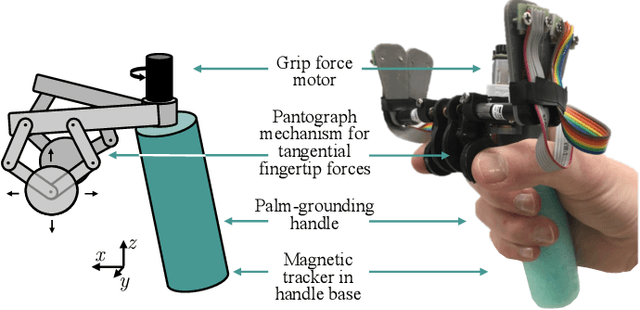
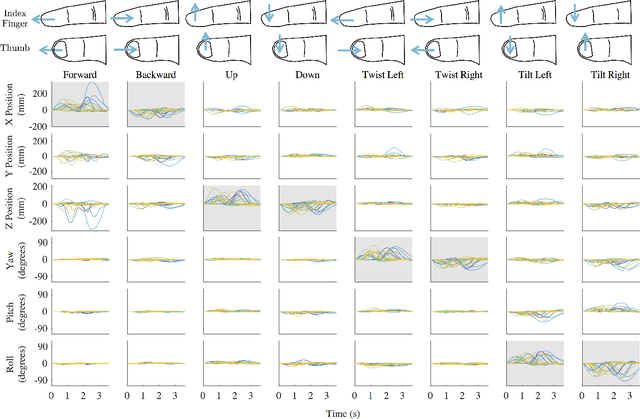
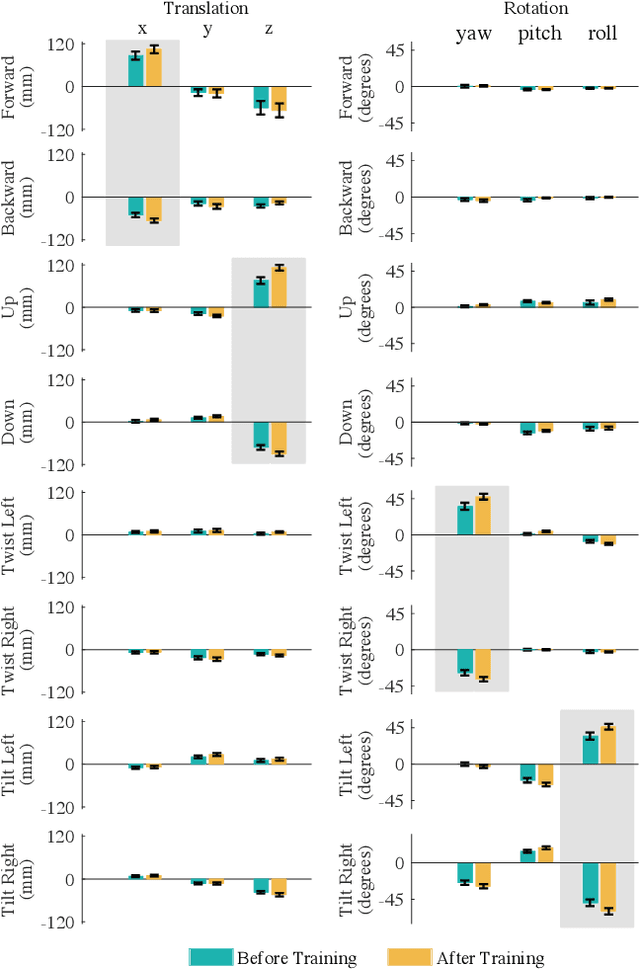
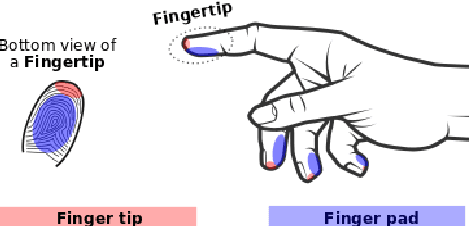
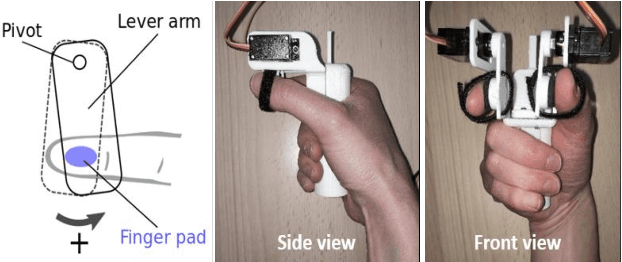
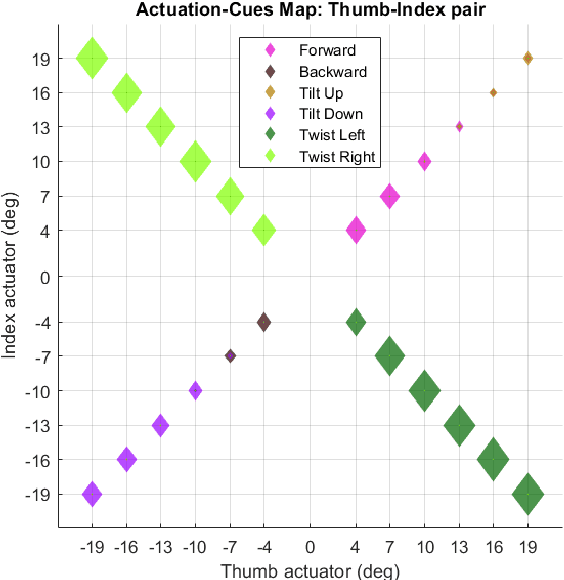
Hand-held haptic devices can allow for greater freedom of motion and larger workspaces than traditional grounded haptic devices. They can also provide more compelling haptic sensations to the users' fingertips than many wearable haptic devices because reaction forces can be distributed over a larger area of skin far away from the stimulation site. This paper presents a hand-held kinesthetic gripper that provides guidance cues in four degrees of freedom (DOF). 2-DOF tangential forces on the thumb and index finger combine to create cues to translate or rotate the hand. We demonstrate the device's capabilities in a three-part user study. First, users moved their hands in response to haptic cues before receiving instruction or training. Then, they trained on cues in eight directions in a forced-choice task. Finally, they repeated the first part, now knowing what each cue intended to convey. Users were able to discriminate each cue over 90% of the time. Users moved correctly in response to the guidance cues both before and after the training and indicated that the cues were easy to follow. The results show promise for holdable kinesthetic devices in haptic feedback and guidance for applications such as virtual reality, medical training, and teleoperation.
Design of an ultrasound-guided robotic brachytherapy needle insertion system
Sep 14, 2009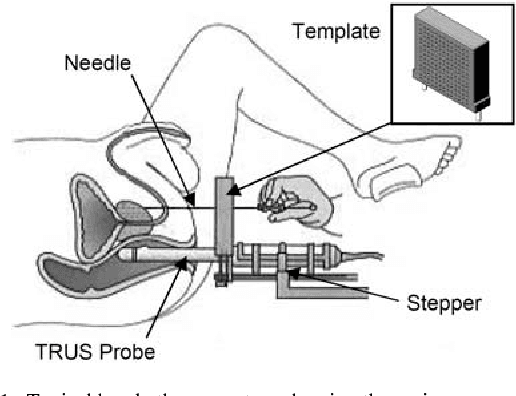
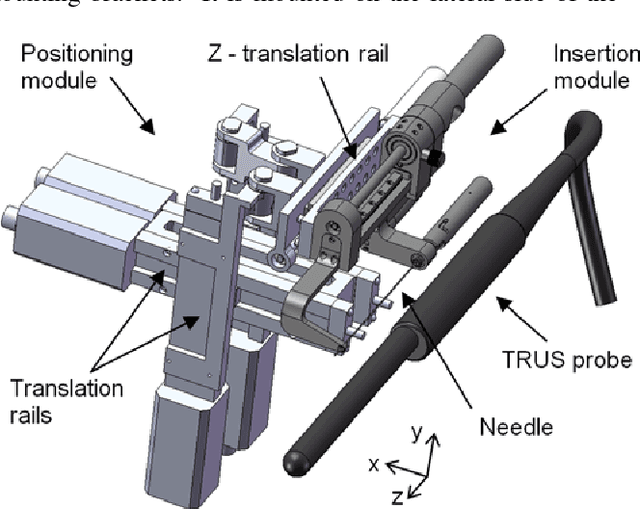
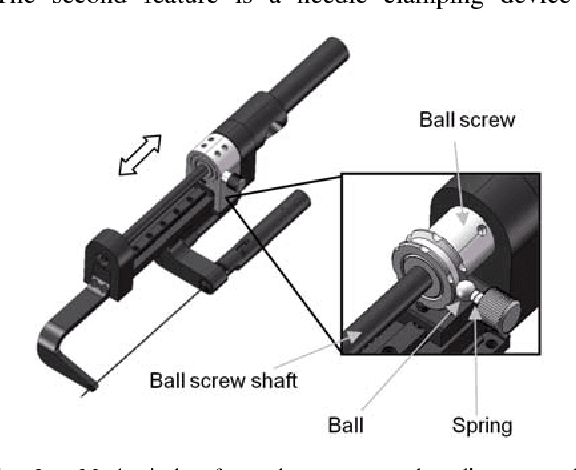
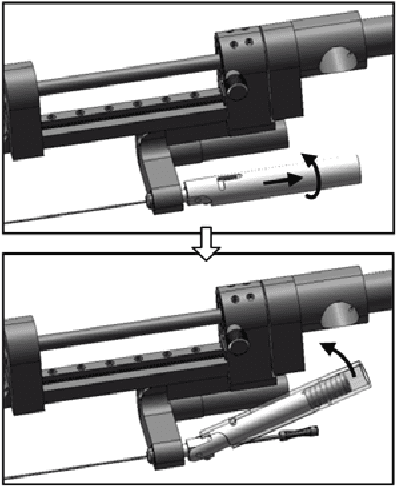
In this paper we describe a new robotic brachytherapy needle-insertion system that is designed to replace the template used in the manual technique. After a brief review of existing robotic systems, we describe the requirements that we based our design upon. A detailed description of the proposed system follows. Our design is capable of positioning and inclining a needle within the same workspace as the manual template. To help improve accuracy, the needle can be rotated about its axis during insertion into the prostate. The system can be mounted on existing steppers and also easily accommodates existing seed dispensers, such as the Mick Applicator.