Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of an ultrasound-guided robotic brachytherapy needle insertion system
Sep 14, 2009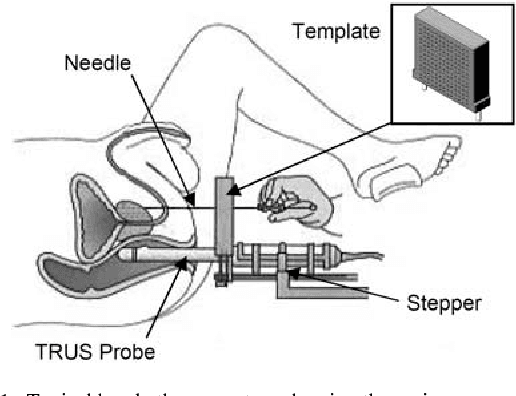
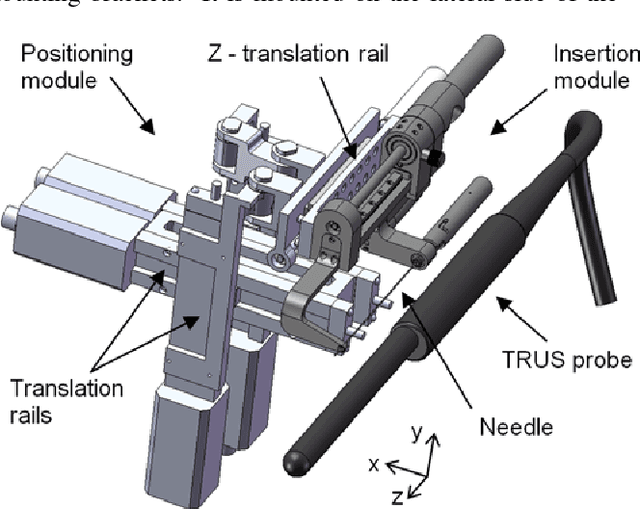
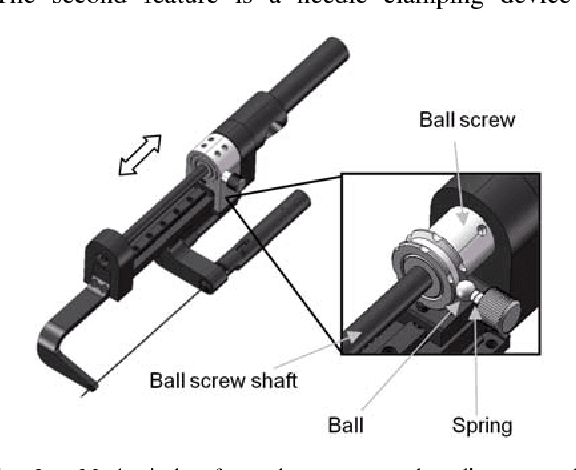
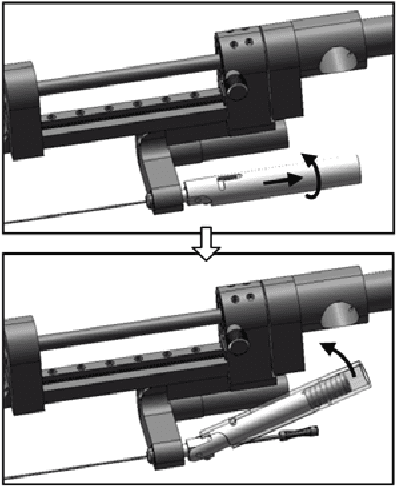
In this paper we describe a new robotic brachytherapy needle-insertion system that is designed to replace the template used in the manual technique. After a brief review of existing robotic systems, we describe the requirements that we based our design upon. A detailed description of the proposed system follows. Our design is capable of positioning and inclining a needle within the same workspace as the manual template. To help improve accuracy, the needle can be rotated about its axis during insertion into the prostate. The system can be mounted on existing steppers and also easily accommodates existing seed dispensers, such as the Mick Applicator.
* 31th International Conference of the Engineering in Medicine and
Biology Society, Minneapolis : France (2009)
Via