 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a Novel Robot for Transperineal Needle Based Interventions: Focal Therapy, Brachytherapy and Prostate Biopsies
Paper and Code
Aug 31, 2012
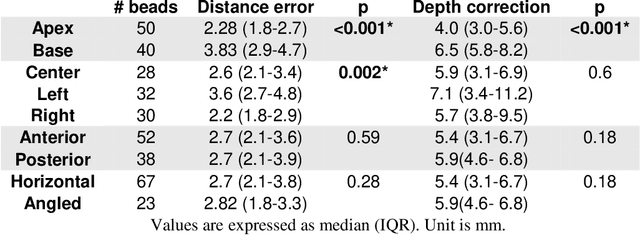
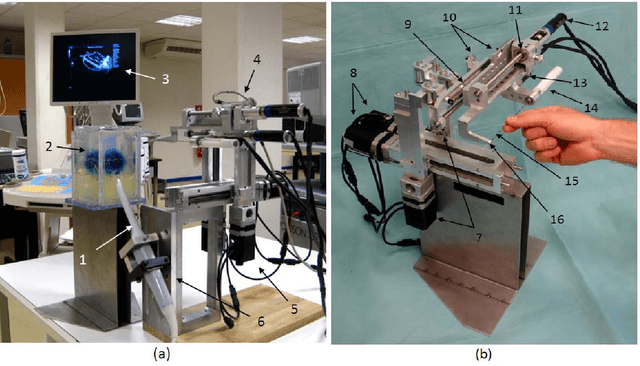

Purpose: We report what is to our knowledge the initial experience with a new 3-dimensional ultrasound robotic system for prostate brachytherapy assistance, focal therapy and prostate biopsies. Its ability to track prostate motion intraoperatively allows it to manage motions and guide needles to predefined targets. Materials and Methods: A robotic system was created for transrectal ultrasound guided needle implantation combined with intraoperative prostate tracking. Experiments were done on 90 targets embedded in a total of 9 mobile, deformable, synthetic prostate phantoms. Experiments involved trying to insert glass beads as close as possible to targets in multimodal anthropomorphic imaging phantoms. Results were measured by segmenting the inserted beads in computerized tomography volumes of the phantoms. Results: The robot reached the chosen targets in phantoms with a median accuracy of 2.73 mm and a median prostate motion of 5.46 mm. Accuracy was better at the apex than at the base (2.28 vs 3.83 mm, p <0.001), and similar for horizontal and angled needle inclinations (2.7 vs 2.82 mm, p = 0.18). Conclusions: To our knowledge this robot for prostate focal therapy, brachytherapy and targeted prostate biopsies is the first system to use intraoperative prostate motion tracking to guide needles into the prostate. Preliminary experiments show its ability to reach targets despite prostate motion.