 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniVLA: Learning to Act Anywhere with Task-centric Latent Actions
May 09, 2025A generalist robot should perform effectively across various environments. However, most existing approaches heavily rely on scaling action-annotated data to enhance their capabilities. Consequently, they are often limited to single physical specification and struggle to learn transferable knowledge across different embodiments and environments. To confront these limitations, we propose UniVLA, a new framework for learning cross-embodiment vision-language-action (VLA) policies. Our key innovation is to derive task-centric action representations from videos with a latent action model. This enables us to exploit extensive data across a wide spectrum of embodiments and perspectives. To mitigate the effect of task-irrelevant dynamics, we incorporate language instructions and establish a latent action model within the DINO feature space. Learned from internet-scale videos, the generalist policy can be deployed to various robots through efficient latent action decoding. We obtain state-of-the-art results across multiple manipulation and navigation benchmarks, as well as real-robot deployments. UniVLA achieves superior performance over OpenVLA with less than 1/20 of pretraining compute and 1/10 of downstream data. Continuous performance improvements are observed as heterogeneous data, even including human videos, are incorporated into the training pipeline. The results underscore UniVLA's potential to facilitate scalable and efficient robot policy learning.
AgiBot World Colosseo: A Large-scale Manipulation Platform for Scalable and Intelligent Embodied Systems
Mar 09, 2025We explore how scalable robot data can address real-world challenges for generalized robotic manipulation. Introducing AgiBot World, a large-scale platform comprising over 1 million trajectories across 217 tasks in five deployment scenarios, we achieve an order-of-magnitude increase in data scale compared to existing datasets. Accelerated by a standardized collection pipeline with human-in-the-loop verification, AgiBot World guarantees high-quality and diverse data distribution. It is extensible from grippers to dexterous hands and visuo-tactile sensors for fine-grained skill acquisition. Building on top of data, we introduce Genie Operator-1 (GO-1), a novel generalist policy that leverages latent action representations to maximize data utilization, demonstrating predictable performance scaling with increased data volume. Policies pre-trained on our dataset achieve an average performance improvement of 30% over those trained on Open X-Embodiment, both in in-domain and out-of-distribution scenarios. GO-1 exhibits exceptional capability in real-world dexterous and long-horizon tasks, achieving over 60% success rate on complex tasks and outperforming prior RDT approach by 32%. By open-sourcing the dataset, tools, and models, we aim to democratize access to large-scale, high-quality robot data, advancing the pursuit of scalable and general-purpose intelligence.
Towards Synergistic, Generalized, and Efficient Dual-System for Robotic Manipulation
Oct 10, 2024

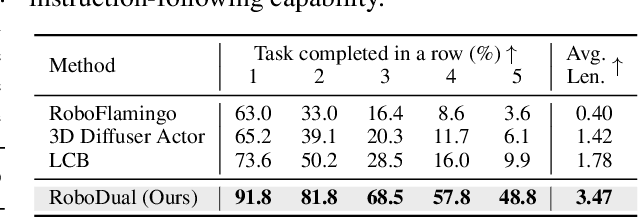

The increasing demand for versatile robotic systems to operate in diverse and dynamic environments has emphasized the importance of a generalist policy, which leverages a large cross-embodiment data corpus to facilitate broad adaptability and high-level reasoning. However, the generalist would struggle with inefficient inference and cost-expensive training. The specialist policy, instead, is curated for specific domain data and excels at task-level precision with efficiency. Yet, it lacks the generalization capacity for a wide range of applications. Inspired by these observations, we introduce RoboDual, a synergistic dual-system that supplements the merits of both generalist and specialist policy. A diffusion transformer-based specialist is devised for multi-step action rollouts, exquisitely conditioned on the high-level task understanding and discretized action output of a vision-language-action (VLA) based generalist. Compared to OpenVLA, RoboDual achieves 26.7% improvement in real-world setting and 12% gain on CALVIN by introducing a specialist policy with merely 20M trainable parameters. It maintains strong performance with 5% of demonstration data only, and enables a 3.8 times higher control frequency in real-world deployment. Code would be made publicly available. Our project page is hosted at: https://opendrivelab.com/RoboDual/
Heterogeneous Federated Learning with Convolutional and Spiking Neural Networks
Jun 14, 2024Federated learning (FL) has emerged as a promising paradigm for training models on decentralized data while safeguarding data privacy. Most existing FL systems, however, assume that all machine learning models are of the same type, although it becomes more likely that different edge devices adopt different types of AI models, including both conventional analogue artificial neural networks (ANNs) and biologically more plausible spiking neural networks (SNNs). This diversity empowers the efficient handling of specific tasks and requirements, showcasing the adaptability and versatility of edge computing platforms. One main challenge of such heterogeneous FL system lies in effectively aggregating models from the local devices in a privacy-preserving manner. To address the above issue, this work benchmarks FL systems containing both convoluntional neural networks (CNNs) and SNNs by comparing various aggregation approaches, including federated CNNs, federated SNNs, federated CNNs for SNNs, federated SNNs for CNNs, and federated CNNs with SNN fusion. Experimental results demonstrate that the CNN-SNN fusion framework exhibits the best performance among the above settings on the MNIST dataset. Additionally, intriguing phenomena of competitive suppression are noted during the convergence process of multi-model FL.