 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLADY: Linear Attention for Autonomous Driving Efficiency without Transformers
Dec 18, 2025End-to-end paradigms have demonstrated great potential for autonomous driving. Additionally, most existing methods are built upon Transformer architectures. However, transformers incur a quadratic attention cost, limiting their ability to model long spatial and temporal sequences-particularly on resource-constrained edge platforms. As autonomous driving inherently demands efficient temporal modeling, this challenge severely limits their deployment and real-time performance. Recently, linear attention mechanisms have gained increasing attention due to their superior spatiotemporal complexity. However, existing linear attention architectures are limited to self-attention, lacking support for cross-modal and cross-temporal interactions-both crucial for autonomous driving. In this work, we propose LADY, the first fully linear attention-based generative model for end-to-end autonomous driving. LADY enables fusion of long-range temporal context at inference with constant computational and memory costs, regardless of the history length of camera and LiDAR features. Additionally, we introduce a lightweight linear cross-attention mechanism that enables effective cross-modal information exchange. Experiments on the NAVSIM and Bench2Drive benchmarks demonstrate that LADY achieves state-of-the-art performance with constant-time and memory complexity, offering improved planning performance and significantly reduced computational cost. Additionally, the model has been deployed and validated on edge devices, demonstrating its practicality in resource-limited scenarios.
FusionAD: Multi-modality Fusion for Prediction and Planning Tasks of Autonomous Driving
Aug 14, 2023



Building a multi-modality multi-task neural network toward accurate and robust performance is a de-facto standard in perception task of autonomous driving. However, leveraging such data from multiple sensors to jointly optimize the prediction and planning tasks remains largely unexplored. In this paper, we present FusionAD, to the best of our knowledge, the first unified framework that fuse the information from two most critical sensors, camera and LiDAR, goes beyond perception task. Concretely, we first build a transformer based multi-modality fusion network to effectively produce fusion based features. In constrast to camera-based end-to-end method UniAD, we then establish a fusion aided modality-aware prediction and status-aware planning modules, dubbed FMSPnP that take advantages of multi-modality features. We conduct extensive experiments on commonly used benchmark nuScenes dataset, our FusionAD achieves state-of-the-art performance and surpassing baselines on average 15% on perception tasks like detection and tracking, 10% on occupancy prediction accuracy, reducing prediction error from 0.708 to 0.389 in ADE score and reduces the collision rate from 0.31% to only 0.12%.
Imitation Learning of Hierarchical Driving Model: from Continuous Intention to Continuous Trajectory
Oct 20, 2020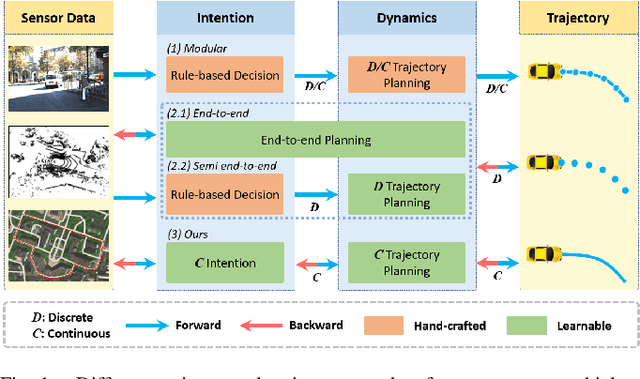
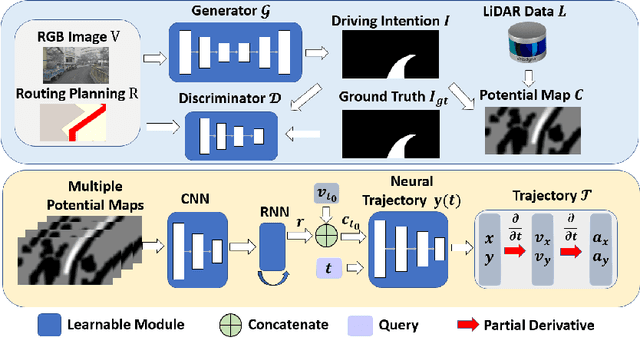
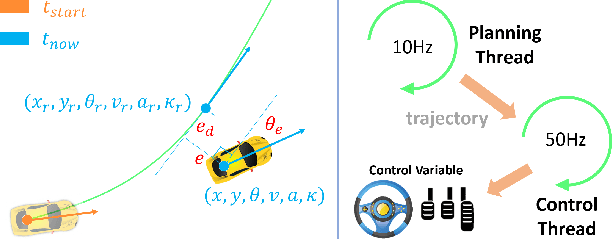
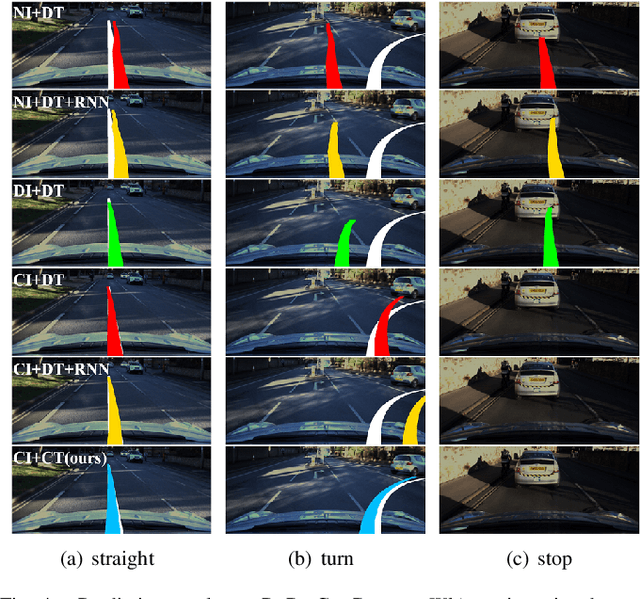
One of the challenges to reduce the gap between the machine and the human level driving is how to endow the system with the learning capacity to deal with the coupled complexity of environments, intentions, and dynamics. In this paper, we propose a hierarchical driving model with explicit model of continuous intention and continuous dynamics, which decouples the complexity in the observation-to-action reasoning in the human driving data. Specifically, the continuous intention module takes the route planning and perception to generate a potential map encoded with obstacles and goals being expressed as grid based potentials. Then, the potential map is regarded as a condition, together with the current dynamics, to generate the trajectory. The trajectory is modeled by a network based continuous function approximator, which naturally reserves the derivatives for high-order supervision without any additional parameters. Finally, we validate our method on both datasets and simulators, demonstrating superior performance. The method is also deployed on the real vehicle with loop latency, validating its effectiveness.
Learning hierarchical behavior and motion planning for autonomous driving
May 08, 2020
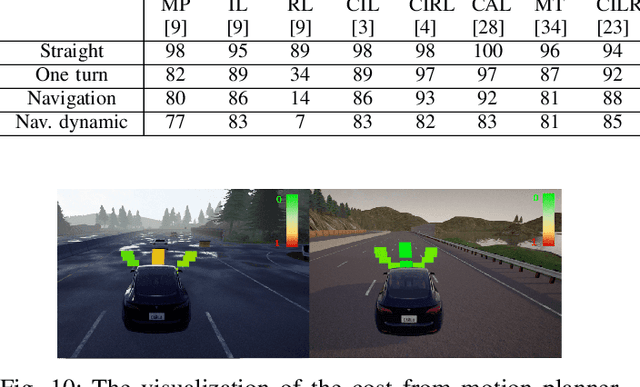
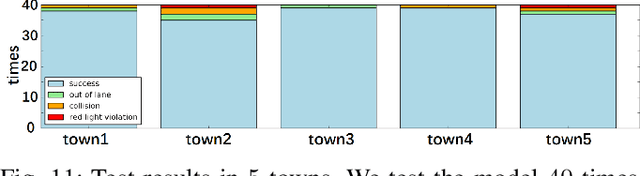
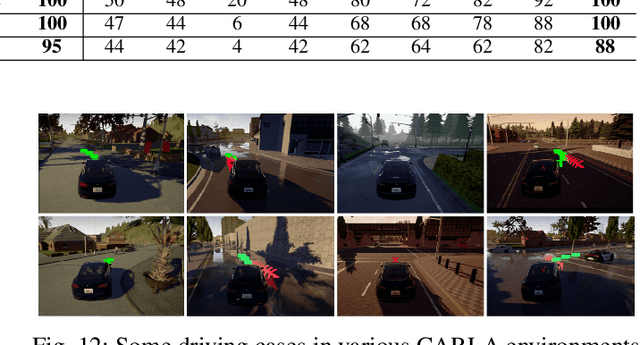
Learning-based driving solution, a new branch for autonomous driving, is expected to simplify the modeling of driving by learning the underlying mechanisms from data. To improve the tactical decision-making for learning-based driving solution, we introduce hierarchical behavior and motion planning (HBMP) to explicitly model the behavior in learning-based solution. Due to the coupled action space of behavior and motion, it is challenging to solve HBMP problem using reinforcement learning (RL) for long-horizon driving tasks. We transform HBMP problem by integrating a classical sampling-based motion planner, of which the optimal cost is regarded as the rewards for high-level behavior learning. As a result, this formulation reduces action space and diversifies the rewards without losing the optimality of HBMP. In addition, we propose a sharable representation for input sensory data across simulation platforms and real-world environment, so that models trained in a fast event-based simulator, SUMO, can be used to initialize and accelerate the RL training in a dynamics based simulator, CARLA. Experimental results demonstrate the effectiveness of the method. Besides, the model is successfully transferred to the real-world, validating the generalization capability.