 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex Dominance in Deep Learning I: A Scaling Law of Loss and Learning Rate
Feb 06, 2026Deep learning has non-convex loss landscape and its optimization dynamics is hard to analyze or control. Nevertheless, the dynamics can be empirically convex-like across various tasks, models, optimizers, hyperparameters, etc. In this work, we examine the applicability of convexity and Lipschitz continuity in deep learning, in order to precisely control the loss dynamics via the learning rate schedules. We illustrate that deep learning quickly becomes weakly convex after a short period of training, and the loss is predicable by an upper bound on the last iterate, which further informs the scaling of optimal learning rate. Through the lens of convexity, we build scaling laws of learning rates and losses that extrapolate as much as 80X across training horizons and 70X across model sizes.
An Analytical Characterization of Sloppiness in Neural Networks: Insights from Linear Models
May 13, 2025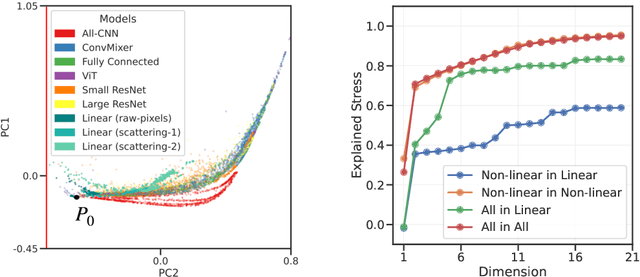
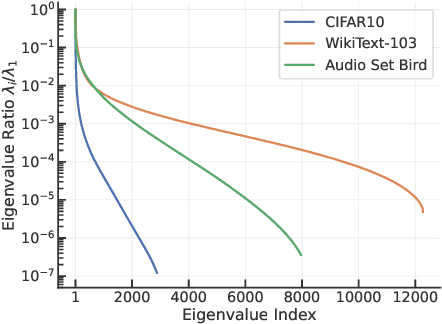
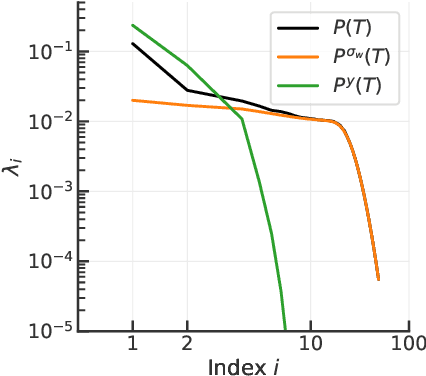
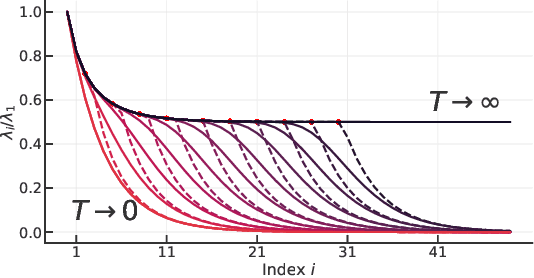
Recent experiments have shown that training trajectories of multiple deep neural networks with different architectures, optimization algorithms, hyper-parameter settings, and regularization methods evolve on a remarkably low-dimensional "hyper-ribbon-like" manifold in the space of probability distributions. Inspired by the similarities in the training trajectories of deep networks and linear networks, we analytically characterize this phenomenon for the latter. We show, using tools in dynamical systems theory, that the geometry of this low-dimensional manifold is controlled by (i) the decay rate of the eigenvalues of the input correlation matrix of the training data, (ii) the relative scale of the ground-truth output to the weights at the beginning of training, and (iii) the number of steps of gradient descent. By analytically computing and bounding the contributions of these quantities, we characterize phase boundaries of the region where hyper-ribbons are to be expected. We also extend our analysis to kernel machines and linear models that are trained with stochastic gradient descent.
The Training Process of Many Deep Networks Explores the Same Low-Dimensional Manifold
May 02, 2023We develop information-geometric techniques to analyze the trajectories of the predictions of deep networks during training. By examining the underlying high-dimensional probabilistic models, we reveal that the training process explores an effectively low-dimensional manifold. Networks with a wide range of architectures, sizes, trained using different optimization methods, regularization techniques, data augmentation techniques, and weight initializations lie on the same manifold in the prediction space. We study the details of this manifold to find that networks with different architectures follow distinguishable trajectories but other factors have a minimal influence; larger networks train along a similar manifold as that of smaller networks, just faster; and networks initialized at very different parts of the prediction space converge to the solution along a similar manifold.
A picture of the space of typical learnable tasks
Oct 31, 2022We develop a technique to analyze representations learned by deep networks when they are trained on different tasks using supervised, meta- and contrastive learning. We develop a technique to visualize such representations using an isometric embedding of the space of probabilistic models into a lower-dimensional space, i.e., one that preserves pairwise distances. We discover the following surprising phenomena that shed light upon the structure in the space of learnable tasks: (1) the manifold of probabilistic models trained on different tasks using different representation learning methods is effectively low-dimensional; (2) supervised learning on one task results in a surprising amount of progress on seemingly dissimilar tasks; progress on other tasks is larger if the training task has diverse classes; (3) the structure of the space of tasks indicated by our analysis is consistent with parts of the Wordnet phylogenetic tree; (4) fine-tuning a model upon a sub-task does not change the representation much if the model was trained for a large number of epochs; (5) episodic meta-learning algorithms fit similar models eventually as that of supervised learning, even if the two traverse different trajectories during training; (6) contrastive learning methods trained on different datasets learn similar representations. We use classification tasks constructed from the CIFAR-10 and Imagenet datasets to study these phenomena.
Scalable and Efficient Training of Large Convolutional Neural Networks with Differential Privacy
May 21, 2022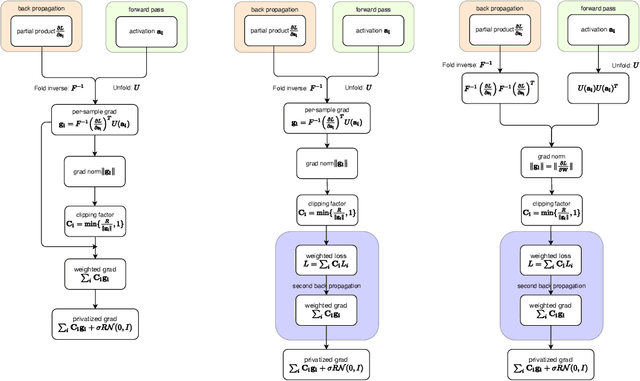


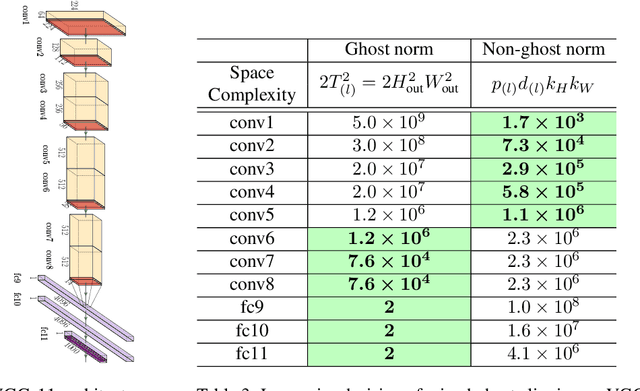
Large convolutional neural networks (CNN) can be difficult to train in the differentially private (DP) regime, since the optimization algorithms require a computationally expensive operation, known as the per-sample gradient clipping. We propose an efficient and scalable implementation of this clipping on convolutional layers, termed as the mixed ghost clipping, that significantly eases the private training in terms of both time and space complexities, without affecting the accuracy. The improvement in efficiency is rigorously studied through the first complexity analysis for the mixed ghost clipping and existing DP training algorithms. Extensive experiments on vision classification tasks, with large ResNet, VGG, and Vision Transformers, demonstrate that DP training with mixed ghost clipping adds $1\sim 10\%$ memory overhead and $<2\times$ slowdown to the standard non-private training. Specifically, when training VGG19 on CIFAR10, the mixed ghost clipping is $3\times$ faster than state-of-the-art Opacus library with $18\times$ larger maximum batch size. To emphasize the significance of efficient DP training on convolutional layers, we achieve 96.7\% accuracy on CIFAR10 and 83.0\% on CIFAR100 at $\epsilon=1$ using BEiT, while the previous best results are 94.8\% and 67.4\%, respectively. We open-source a privacy engine (\url{https://github.com/JialinMao/private_CNN}) that implements DP training of CNN with a few lines of code.
Loss Functions for Multiset Prediction
Oct 25, 2018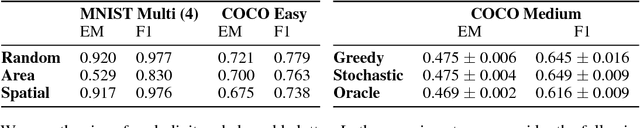
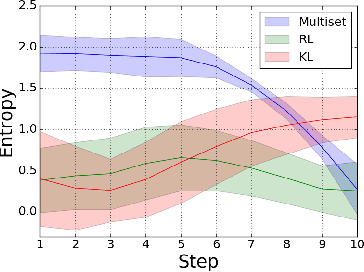
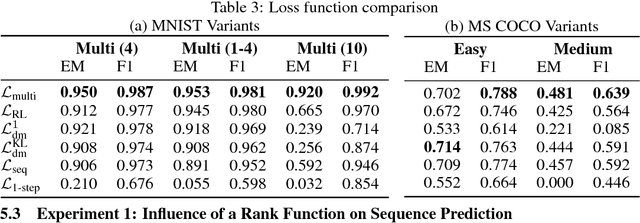
We study the problem of multiset prediction. The goal of multiset prediction is to train a predictor that maps an input to a multiset consisting of multiple items. Unlike existing problems in supervised learning, such as classification, ranking and sequence generation, there is no known order among items in a target multiset, and each item in the multiset may appear more than once, making this problem extremely challenging. In this paper, we propose a novel multiset loss function by viewing this problem from the perspective of sequential decision making. The proposed multiset loss function is empirically evaluated on two families of datasets, one synthetic and the other real, with varying levels of difficulty, against various baseline loss functions including reinforcement learning, sequence, and aggregated distribution matching loss functions. The experiments reveal the effectiveness of the proposed loss function over the others.
Saliency-based Sequential Image Attention with Multiset Prediction
Nov 14, 2017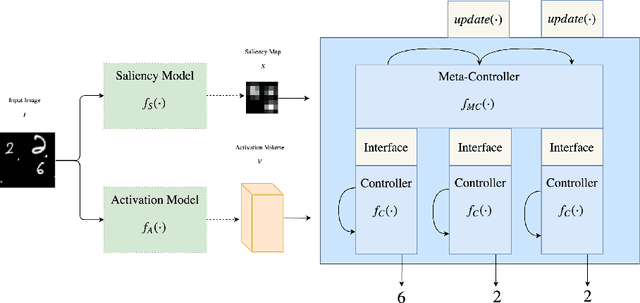
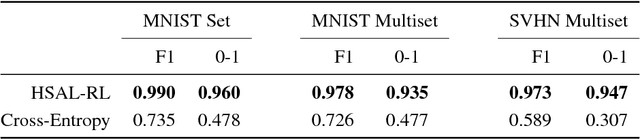
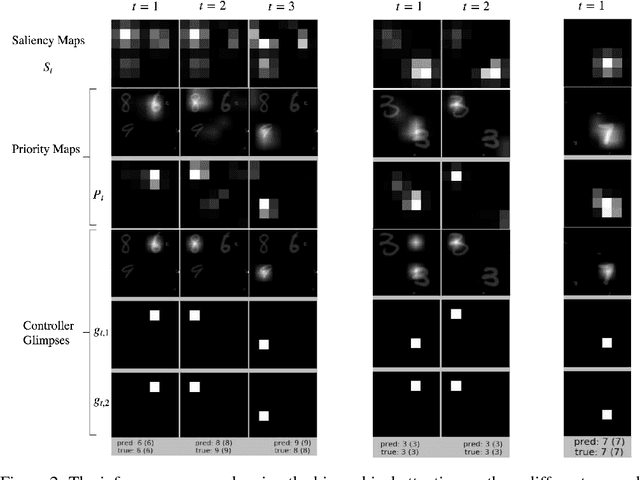
Humans process visual scenes selectively and sequentially using attention. Central to models of human visual attention is the saliency map. We propose a hierarchical visual architecture that operates on a saliency map and uses a novel attention mechanism to sequentially focus on salient regions and take additional glimpses within those regions. The architecture is motivated by human visual attention, and is used for multi-label image classification on a novel multiset task, demonstrating that it achieves high precision and recall while localizing objects with its attention. Unlike conventional multi-label image classification models, the model supports multiset prediction due to a reinforcement-learning based training process that allows for arbitrary label permutation and multiple instances per label.