 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM$^2$-Miner: Multi-Agent Enhanced MCTS for Mobile GUI Agent Data Mining
Feb 05, 2026Graphical User Interface (GUI) agent is pivotal to advancing intelligent human-computer interaction paradigms. Constructing powerful GUI agents necessitates the large-scale annotation of high-quality user-behavior trajectory data (i.e., intent-trajectory pairs) for training. However, manual annotation methods and current GUI agent data mining approaches typically face three critical challenges: high construction cost, poor data quality, and low data richness. To address these issues, we propose M$^2$-Miner, the first low-cost and automated mobile GUI agent data-mining framework based on Monte Carlo Tree Search (MCTS). For better data mining efficiency and quality, we present a collaborative multi-agent framework, comprising InferAgent, OrchestraAgent, and JudgeAgent for guidance, acceleration, and evaluation. To further enhance the efficiency of mining and enrich intent diversity, we design an intent recycling strategy to extract extra valuable interaction trajectories. Additionally, a progressive model-in-the-loop training strategy is introduced to improve the success rate of data mining. Extensive experiments have demonstrated that the GUI agent fine-tuned using our mined data achieves state-of-the-art performance on several commonly used mobile GUI benchmarks. Our work will be released to facilitate the community research.
SparkUI-Parser: Enhancing GUI Perception with Robust Grounding and Parsing
Sep 05, 2025The existing Multimodal Large Language Models (MLLMs) for GUI perception have made great progress. However, the following challenges still exist in prior methods: 1) They model discrete coordinates based on text autoregressive mechanism, which results in lower grounding accuracy and slower inference speed. 2) They can only locate predefined sets of elements and are not capable of parsing the entire interface, which hampers the broad application and support for downstream tasks. To address the above issues, we propose SparkUI-Parser, a novel end-to-end framework where higher localization precision and fine-grained parsing capability of the entire interface are simultaneously achieved. Specifically, instead of using probability-based discrete modeling, we perform continuous modeling of coordinates based on a pre-trained Multimodal Large Language Model (MLLM) with an additional token router and coordinate decoder. This effectively mitigates the limitations inherent in the discrete output characteristics and the token-by-token generation process of MLLMs, consequently boosting both the accuracy and the inference speed. To further enhance robustness, a rejection mechanism based on a modified Hungarian matching algorithm is introduced, which empowers the model to identify and reject non-existent elements, thereby reducing false positives. Moreover, we present ScreenParse, a rigorously constructed benchmark to systematically assess structural perception capabilities of GUI models across diverse scenarios. Extensive experiments demonstrate that our approach consistently outperforms SOTA methods on ScreenSpot, ScreenSpot-v2, CAGUI-Grounding and ScreenParse benchmarks. The resources are available at https://github.com/antgroup/SparkUI-Parser.
YOLO-Vehicle-Pro: A Cloud-Edge Collaborative Framework for Object Detection in Autonomous Driving under Adverse Weather Conditions
Oct 23, 2024



With the rapid advancement of autonomous driving technology, efficient and accurate object detection capabilities have become crucial factors in ensuring the safety and reliability of autonomous driving systems. However, in low-visibility environments such as hazy conditions, the performance of traditional object detection algorithms often degrades significantly, failing to meet the demands of autonomous driving. To address this challenge, this paper proposes two innovative deep learning models: YOLO-Vehicle and YOLO-Vehicle-Pro. YOLO-Vehicle is an object detection model tailored specifically for autonomous driving scenarios, employing multimodal fusion techniques to combine image and textual information for object detection. YOLO-Vehicle-Pro builds upon this foundation by introducing an improved image dehazing algorithm, enhancing detection performance in low-visibility environments. In addition to model innovation, this paper also designs and implements a cloud-edge collaborative object detection system, deploying models on edge devices and offloading partial computational tasks to the cloud in complex situations. Experimental results demonstrate that on the KITTI dataset, the YOLO-Vehicle-v1s model achieved 92.1% accuracy while maintaining a detection speed of 226 FPS and an inference time of 12ms, meeting the real-time requirements of autonomous driving. When processing hazy images, the YOLO-Vehicle-Pro model achieved a high accuracy of 82.3% mAP@50 on the Foggy Cityscapes dataset while maintaining a detection speed of 43 FPS.
PNeSM: Arbitrary 3D Scene Stylization via Prompt-Based Neural Style Mapping
Mar 13, 20243D scene stylization refers to transform the appearance of a 3D scene to match a given style image, ensuring that images rendered from different viewpoints exhibit the same style as the given style image, while maintaining the 3D consistency of the stylized scene. Several existing methods have obtained impressive results in stylizing 3D scenes. However, the models proposed by these methods need to be re-trained when applied to a new scene. In other words, their models are coupled with a specific scene and cannot adapt to arbitrary other scenes. To address this issue, we propose a novel 3D scene stylization framework to transfer an arbitrary style to an arbitrary scene, without any style-related or scene-related re-training. Concretely, we first map the appearance of the 3D scene into a 2D style pattern space, which realizes complete disentanglement of the geometry and appearance of the 3D scene and makes our model be generalized to arbitrary 3D scenes. Then we stylize the appearance of the 3D scene in the 2D style pattern space via a prompt-based 2D stylization algorithm. Experimental results demonstrate that our proposed framework is superior to SOTA methods in both visual quality and generalization.
Attack Deterministic Conditional Image Generative Models for Diverse and Controllable Generation
Mar 13, 2024Existing generative adversarial network (GAN) based conditional image generative models typically produce fixed output for the same conditional input, which is unreasonable for highly subjective tasks, such as large-mask image inpainting or style transfer. On the other hand, GAN-based diverse image generative methods require retraining/fine-tuning the network or designing complex noise injection functions, which is computationally expensive, task-specific, or struggle to generate high-quality results. Given that many deterministic conditional image generative models have been able to produce high-quality yet fixed results, we raise an intriguing question: is it possible for pre-trained deterministic conditional image generative models to generate diverse results without changing network structures or parameters? To answer this question, we re-examine the conditional image generation tasks from the perspective of adversarial attack and propose a simple and efficient plug-in projected gradient descent (PGD) like method for diverse and controllable image generation. The key idea is attacking the pre-trained deterministic generative models by adding a micro perturbation to the input condition. In this way, diverse results can be generated without any adjustment of network structures or fine-tuning of the pre-trained models. In addition, we can also control the diverse results to be generated by specifying the attack direction according to a reference text or image. Our work opens the door to applying adversarial attack to low-level vision tasks, and experiments on various conditional image generation tasks demonstrate the effectiveness and superiority of the proposed method.
VGOS: Voxel Grid Optimization for View Synthesis from Sparse Inputs
Apr 26, 2023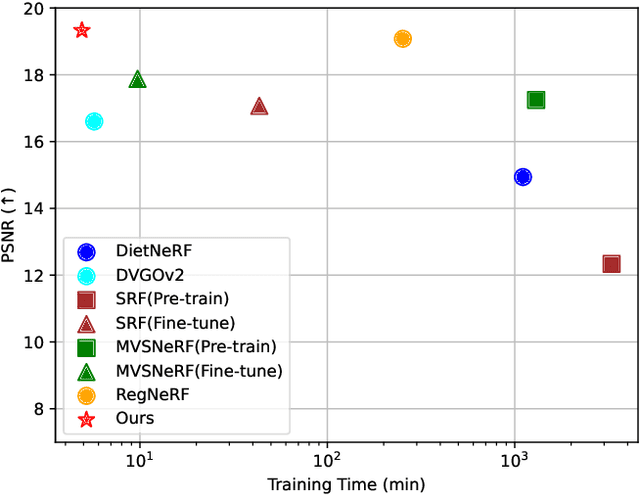
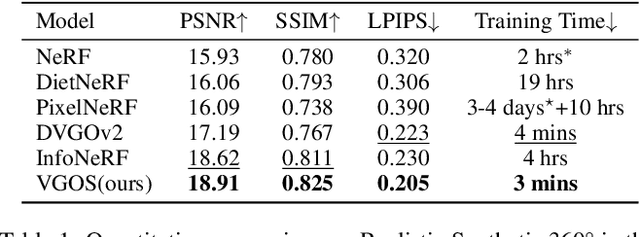
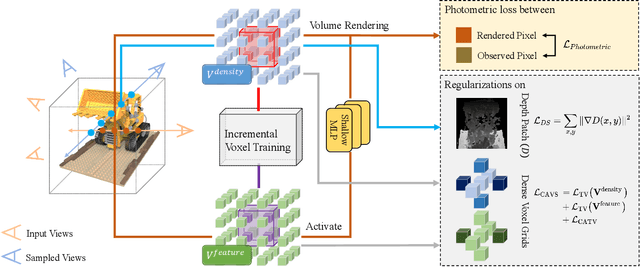
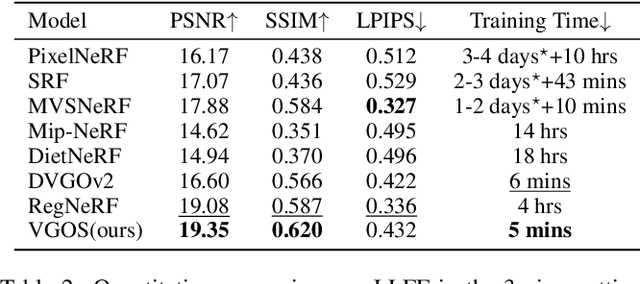
Neural Radiance Fields (NeRF) has shown great success in novel view synthesis due to its state-of-the-art quality and flexibility. However, NeRF requires dense input views (tens to hundreds) and a long training time (hours to days) for a single scene to generate high-fidelity images. Although using the voxel grids to represent the radiance field can significantly accelerate the optimization process, we observe that for sparse inputs, the voxel grids are more prone to overfitting to the training views and will have holes and floaters, which leads to artifacts. In this paper, we propose VGOS, an approach for fast (3-5 minutes) radiance field reconstruction from sparse inputs (3-10 views) to address these issues. To improve the performance of voxel-based radiance field in sparse input scenarios, we propose two methods: (a) We introduce an incremental voxel training strategy, which prevents overfitting by suppressing the optimization of peripheral voxels in the early stage of reconstruction. (b) We use several regularization techniques to smooth the voxels, which avoids degenerate solutions. Experiments demonstrate that VGOS achieves state-of-the-art performance for sparse inputs with super-fast convergence. Code will be available at https://github.com/SJoJoK/VGOS.
Generative Image Inpainting with Segmentation Confusion Adversarial Training and Contrastive Learning
Mar 23, 2023



This paper presents a new adversarial training framework for image inpainting with segmentation confusion adversarial training (SCAT) and contrastive learning. SCAT plays an adversarial game between an inpainting generator and a segmentation network, which provides pixel-level local training signals and can adapt to images with free-form holes. By combining SCAT with standard global adversarial training, the new adversarial training framework exhibits the following three advantages simultaneously: (1) the global consistency of the repaired image, (2) the local fine texture details of the repaired image, and (3) the flexibility of handling images with free-form holes. Moreover, we propose the textural and semantic contrastive learning losses to stabilize and improve our inpainting model's training by exploiting the feature representation space of the discriminator, in which the inpainting images are pulled closer to the ground truth images but pushed farther from the corrupted images. The proposed contrastive losses better guide the repaired images to move from the corrupted image data points to the real image data points in the feature representation space, resulting in more realistic completed images. We conduct extensive experiments on two benchmark datasets, demonstrating our model's effectiveness and superiority both qualitatively and quantitatively.