 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePNeSM: Arbitrary 3D Scene Stylization via Prompt-Based Neural Style Mapping
Mar 13, 20243D scene stylization refers to transform the appearance of a 3D scene to match a given style image, ensuring that images rendered from different viewpoints exhibit the same style as the given style image, while maintaining the 3D consistency of the stylized scene. Several existing methods have obtained impressive results in stylizing 3D scenes. However, the models proposed by these methods need to be re-trained when applied to a new scene. In other words, their models are coupled with a specific scene and cannot adapt to arbitrary other scenes. To address this issue, we propose a novel 3D scene stylization framework to transfer an arbitrary style to an arbitrary scene, without any style-related or scene-related re-training. Concretely, we first map the appearance of the 3D scene into a 2D style pattern space, which realizes complete disentanglement of the geometry and appearance of the 3D scene and makes our model be generalized to arbitrary 3D scenes. Then we stylize the appearance of the 3D scene in the 2D style pattern space via a prompt-based 2D stylization algorithm. Experimental results demonstrate that our proposed framework is superior to SOTA methods in both visual quality and generalization.
VGOS: Voxel Grid Optimization for View Synthesis from Sparse Inputs
Apr 26, 2023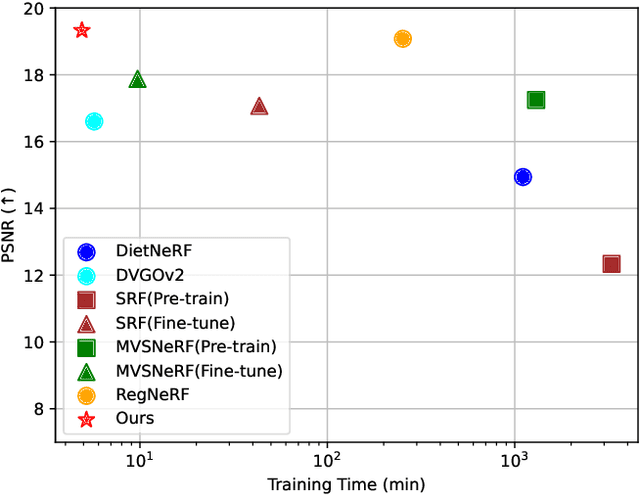
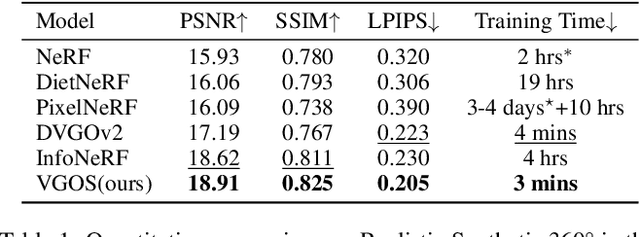
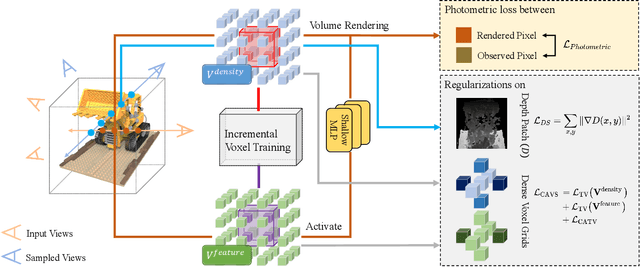
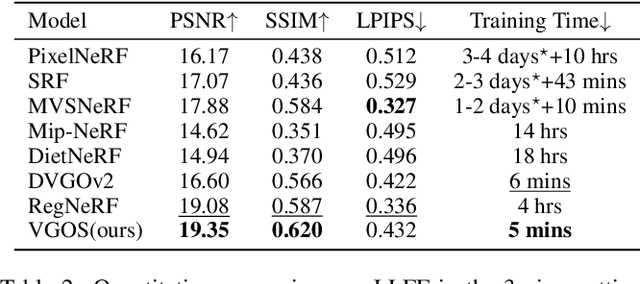
Neural Radiance Fields (NeRF) has shown great success in novel view synthesis due to its state-of-the-art quality and flexibility. However, NeRF requires dense input views (tens to hundreds) and a long training time (hours to days) for a single scene to generate high-fidelity images. Although using the voxel grids to represent the radiance field can significantly accelerate the optimization process, we observe that for sparse inputs, the voxel grids are more prone to overfitting to the training views and will have holes and floaters, which leads to artifacts. In this paper, we propose VGOS, an approach for fast (3-5 minutes) radiance field reconstruction from sparse inputs (3-10 views) to address these issues. To improve the performance of voxel-based radiance field in sparse input scenarios, we propose two methods: (a) We introduce an incremental voxel training strategy, which prevents overfitting by suppressing the optimization of peripheral voxels in the early stage of reconstruction. (b) We use several regularization techniques to smooth the voxels, which avoids degenerate solutions. Experiments demonstrate that VGOS achieves state-of-the-art performance for sparse inputs with super-fast convergence. Code will be available at https://github.com/SJoJoK/VGOS.