 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBabelCalib: A Universal Approach to Calibrating Central Cameras
Sep 20, 2021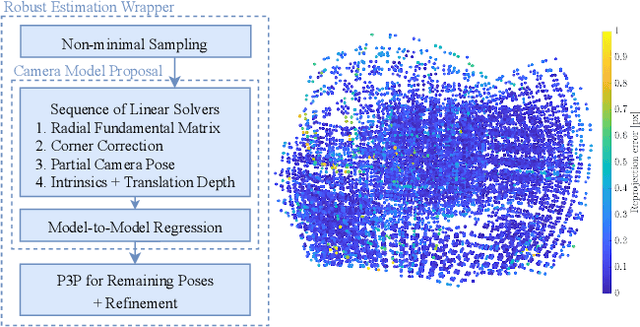
Existing calibration methods occasionally fail for large field-of-view cameras due to the non-linearity of the underlying problem and the lack of good initial values for all parameters of the used camera model. This might occur because a simpler projection model is assumed in an initial step, or a poor initial guess for the internal parameters is pre-defined. A lot of the difficulties of general camera calibration lie in the use of a forward projection model. We side-step these challenges by first proposing a solver to calibrate the parameters in terms of a back-projection model and then regress the parameters for a target forward model. These steps are incorporated in a robust estimation framework to cope with outlying detections. Extensive experiments demonstrate that our approach is very reliable and returns the most accurate calibration parameters as measured on the downstream task of absolute pose estimation on test sets. The code is released at https://github.com/ylochman/babelcalib.
Minimal Solvers for Single-View Lens-Distorted Camera Auto-Calibration
Nov 17, 2020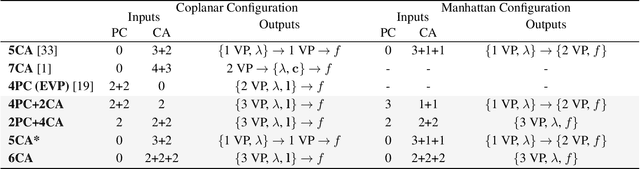
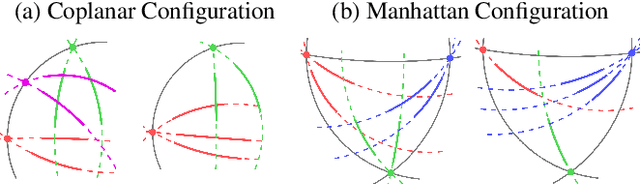

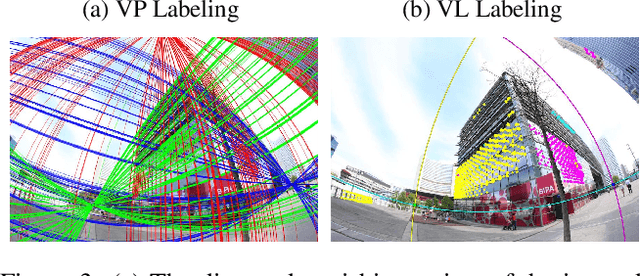
This paper proposes minimal solvers that use combinations of imaged translational symmetries and parallel scene lines to jointly estimate lens undistortion with either affine rectification or focal length and absolute orientation. We use constraints provided by orthogonal scene planes to recover the focal length. We show that solvers using feature combinations can recover more accurate calibrations than solvers using only one feature type on scenes that have a balance of lines and texture. We also show that the proposed solvers are complementary and can be used together in a RANSAC-based estimator to improve auto-calibration accuracy. State-of-the-art performance is demonstrated on a standard dataset of lens-distorted urban images. The code is available at https://github.com/ylochman/single-view-autocalib.
Minimal Solvers for Rectifying from Radially-Distorted Conjugate Translations
Nov 04, 2019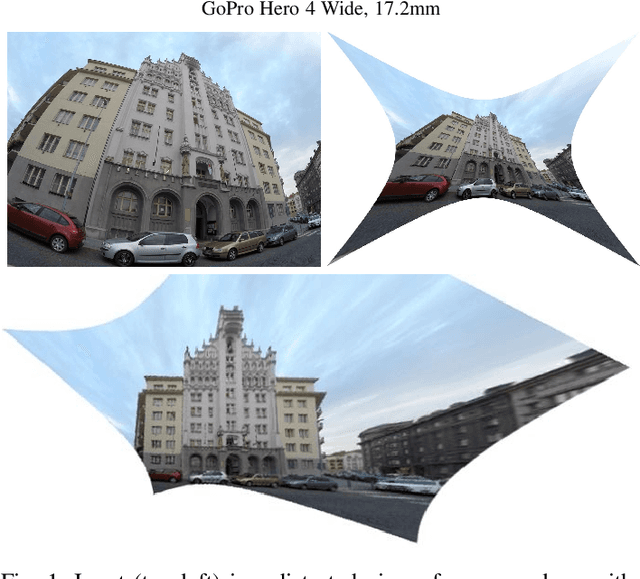

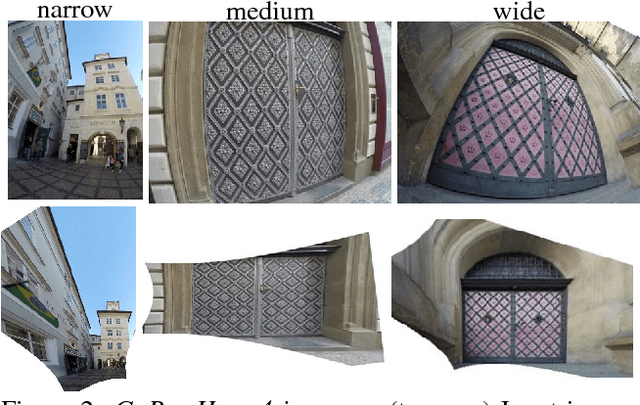
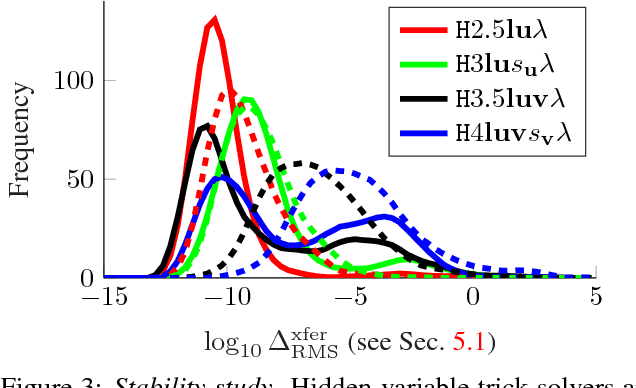
This paper introduces minimal solvers that jointly solve for affine-rectification and radial lens undistortion from the image of translated and reflected coplanar features. The proposed solvers use the invariant that the affine-rectified image of the meet of the joins of radially-distorted conjugately-translated point correspondences is on the line at infinity. The hidden-variable trick from algebraic geometry is used to reformulate and simplify the constraints so that the generated solvers are stable, small and fast. Multiple solvers are proposed to accommodate various local feature types and sampling strategies, and, remarkably, three of the proposed solvers can recover rectification and lens undistortion from only one radially-distorted conjugately-translated affine-covariant region correspondence. Synthetic and real-image experiments confirm that the proposed solvers demonstrate superior robustness to noise compared to the state of the art. Accurate rectifications on imagery taken with narrow to fisheye field-of-view lenses demonstrate the wide applicability of the proposed method. The method is fully automatic.
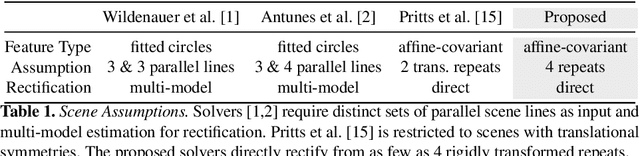
Minimal Solvers for Rectifying from Radially-Distorted Scales and Change of Scales
Jul 25, 2019

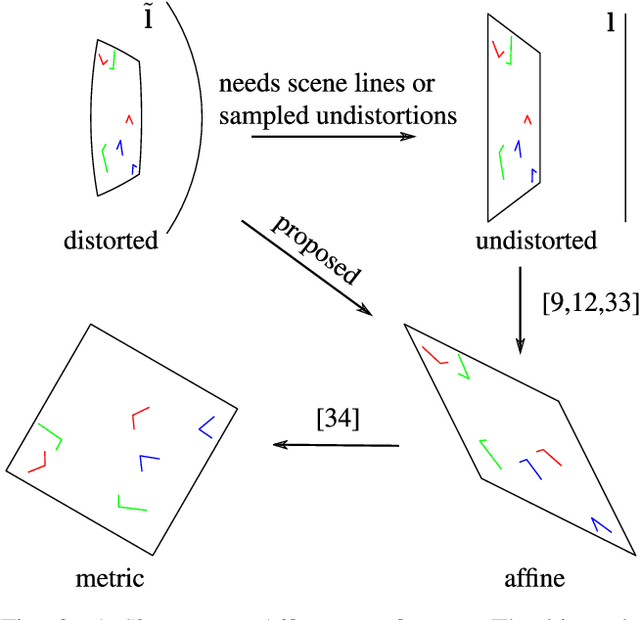
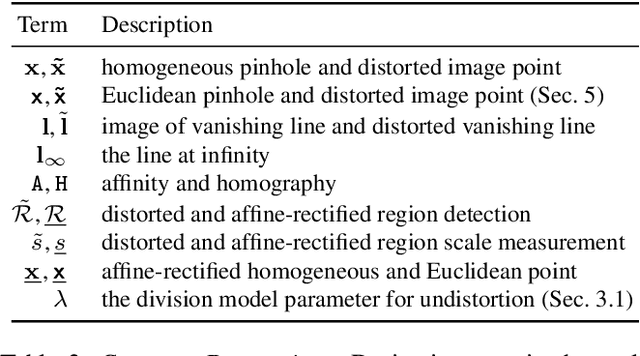
This paper introduces the first minimal solvers that jointly estimate lens distortion and affine rectification from the image of rigidly-transformed coplanar features. The solvers work on scenes without straight lines and, in general, relax strong assumptions about scene content made by the state of the art. The proposed solvers use the affine invariant that coplanar repeats have the same scale in rectified space. The solvers are separated into two groups that differ by how the equal scale invariant of rectified space is used to place constraints on the lens undistortion and rectification parameters. We demonstrate a principled approach for generating stable minimal solvers by the Gr\"obner basis method, which is accomplished by sampling feasible monomial bases to maximize numerical stability. Synthetic and real-image experiments confirm that the proposed solvers demonstrate superior robustness to noise compared to the state of the art. Accurate rectifications on imagery taken with narrow to fisheye field-of-view lenses demonstrate the wide applicability of the proposed method. The method is fully automatic.
Rectification from Radially-Distorted Scales
Oct 30, 2018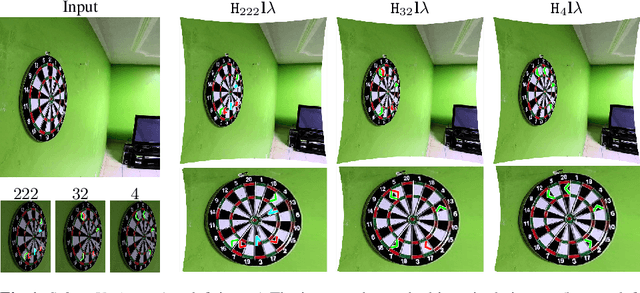


This paper introduces the first minimal solvers that jointly estimate lens distortion and affine rectification from repetitions of rigidly transformed coplanar local features. The proposed solvers incorporate lens distortion into the camera model and extend accurate rectification to wide-angle images that contain nearly any type of coplanar repeated content. We demonstrate a principled approach to generating stable minimal solvers by the Grobner basis method, which is accomplished by sampling feasible monomial bases to maximize numerical stability. Synthetic and real-image experiments confirm that the solvers give accurate rectifications from noisy measurements when used in a RANSAC-based estimator. The proposed solvers demonstrate superior robustness to noise compared to the state-of-the-art. The solvers work on scenes without straight lines and, in general, relax the strong assumptions on scene content made by the state-of-the-art. Accurate rectifications on imagery that was taken with narrow focal length to near fish-eye lenses demonstrate the wide applicability of the proposed method. The method is fully automated, and the code is publicly available at https://github.com/prittjam/repeats.
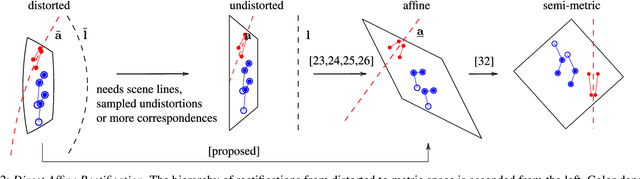
Radially-Distorted Conjugate Translations
Jun 21, 2018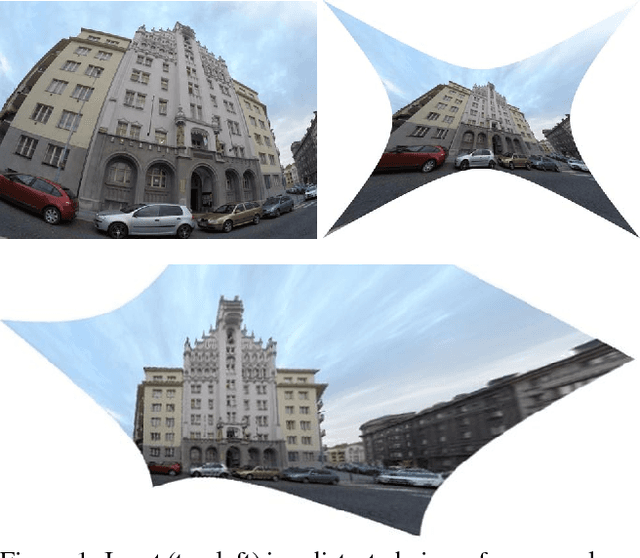

This paper introduces the first minimal solvers that jointly solve for affine-rectification and radial lens distortion from coplanar repeated patterns. Even with imagery from moderately distorted lenses, plane rectification using the pinhole camera model is inaccurate or invalid. The proposed solvers incorporate lens distortion into the camera model and extend accurate rectification to wide-angle imagery, which is now common from consumer cameras. The solvers are derived from constraints induced by the conjugate translations of an imaged scene plane, which are integrated with the division model for radial lens distortion. The hidden-variable trick with ideal saturation is used to reformulate the constraints so that the solvers generated by the Grobner-basis method are stable, small and fast. Rectification and lens distortion are recovered from either one conjugately translated affine-covariant feature or two independently translated similarity-covariant features. The proposed solvers are used in a \RANSAC-based estimator, which gives accurate rectifications after few iterations. The proposed solvers are evaluated against the state-of-the-art and demonstrate significantly better rectifications on noisy measurements. Qualitative results on diverse imagery demonstrate high-accuracy undistortions and rectifications. The source code is publicly available at https://github.com/prittjam/repeats.
Coplanar Repeats by Energy Minimization
Nov 26, 2017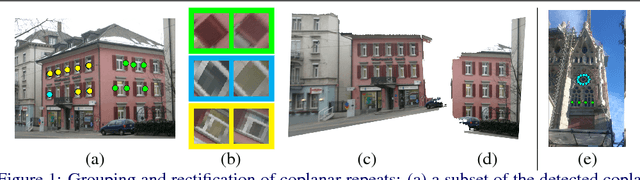


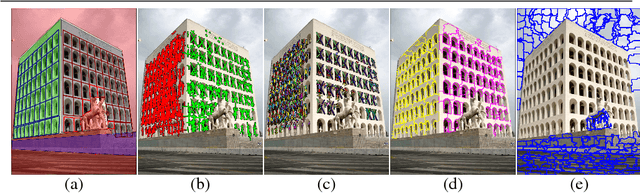
This paper proposes an automated method to detect, group and rectify arbitrarily-arranged coplanar repeated elements via energy minimization. The proposed energy functional combines several features that model how planes with coplanar repeats are projected into images and captures global interactions between different coplanar repeat groups and scene planes. An inference framework based on a recent variant of $\alpha$-expansion is described and fast convergence is demonstrated. We compare the proposed method to two widely-used geometric multi-model fitting methods using a new dataset of annotated images containing multiple scene planes with coplanar repeats in varied arrangements. The evaluation shows a significant improvement in the accuracy of rectifications computed from coplanar repeats detected with the proposed method versus those detected with the baseline methods.
* 14 pages with supplemental materials attached