 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadially-Distorted Conjugate Translations
Paper and Code
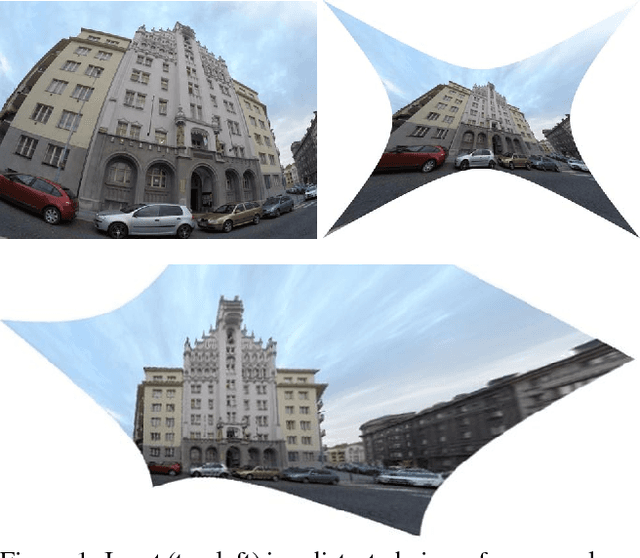

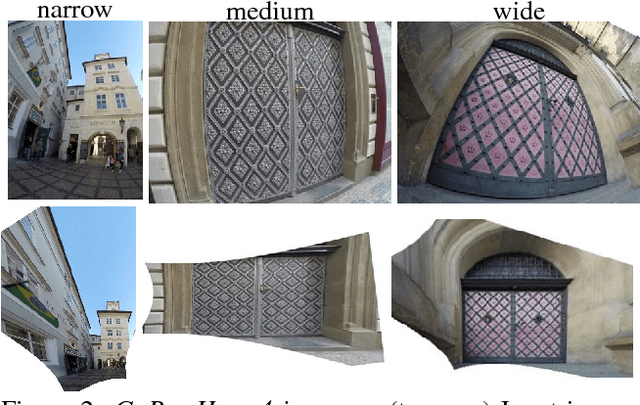
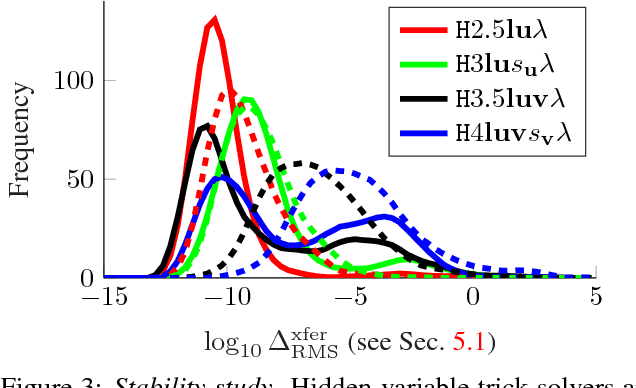
This paper introduces the first minimal solvers that jointly solve for affine-rectification and radial lens distortion from coplanar repeated patterns. Even with imagery from moderately distorted lenses, plane rectification using the pinhole camera model is inaccurate or invalid. The proposed solvers incorporate lens distortion into the camera model and extend accurate rectification to wide-angle imagery, which is now common from consumer cameras. The solvers are derived from constraints induced by the conjugate translations of an imaged scene plane, which are integrated with the division model for radial lens distortion. The hidden-variable trick with ideal saturation is used to reformulate the constraints so that the solvers generated by the Grobner-basis method are stable, small and fast. Rectification and lens distortion are recovered from either one conjugately translated affine-covariant feature or two independently translated similarity-covariant features. The proposed solvers are used in a \RANSAC-based estimator, which gives accurate rectifications after few iterations. The proposed solvers are evaluated against the state-of-the-art and demonstrate significantly better rectifications on noisy measurements. Qualitative results on diverse imagery demonstrate high-accuracy undistortions and rectifications. The source code is publicly available at https://github.com/prittjam/repeats.