 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-the-Fly VLA Adaptation via Test-Time Reinforcement Learning
Jan 13, 2026Vision-Language-Action models have recently emerged as a powerful paradigm for general-purpose robot learning, enabling agents to map visual observations and natural-language instructions into executable robotic actions. Though popular, they are primarily trained via supervised fine-tuning or training-time reinforcement learning, requiring explicit fine-tuning phases, human interventions, or controlled data collection. Consequently, existing methods remain unsuitable for challenging simulated- or physical-world deployments, where robots must respond autonomously and flexibly to evolving environments. To address this limitation, we introduce a Test-Time Reinforcement Learning for VLAs (TT-VLA), a framework that enables on-the-fly policy adaptation during inference. TT-VLA formulates a dense reward mechanism that leverages step-by-step task-progress signals to refine action policies during test time while preserving the SFT/RL-trained priors, making it an effective supplement to current VLA models. Empirical results show that our approach enhances overall adaptability, stability, and task success in dynamic, previously unseen scenarios under simulated and real-world settings. We believe TT-VLA offers a principled step toward self-improving, deployment-ready VLAs.
Exploring the Adversarial Vulnerabilities of Vision-Language-Action Models in Robotics
Nov 22, 2024



Recently in robotics, Vision-Language-Action (VLA) models have emerged as a transformative approach, enabling robots to execute complex tasks by integrating visual and linguistic inputs within an end-to-end learning framework. While VLA models offer significant capabilities, they also introduce new attack surfaces, making them vulnerable to adversarial attacks. With these vulnerabilities largely unexplored, this paper systematically quantifies the robustness of VLA-based robotic systems. Recognizing the unique demands of robotic execution, our attack objectives target the inherent spatial and functional characteristics of robotic systems. In particular, we introduce an untargeted position-aware attack objective that leverages spatial foundations to destabilize robotic actions, and a targeted attack objective that manipulates the robotic trajectory. Additionally, we design an adversarial patch generation approach that places a small, colorful patch within the camera's view, effectively executing the attack in both digital and physical environments. Our evaluation reveals a marked degradation in task success rates, with up to a 100\% reduction across a suite of simulated robotic tasks, highlighting critical security gaps in current VLA architectures. By unveiling these vulnerabilities and proposing actionable evaluation metrics, this work advances both the understanding and enhancement of safety for VLA-based robotic systems, underscoring the necessity for developing robust defense strategies prior to physical-world deployments.
Diff-PIC: Revolutionizing Particle-In-Cell Simulation for Advancing Nuclear Fusion with Diffusion Models
Aug 03, 2024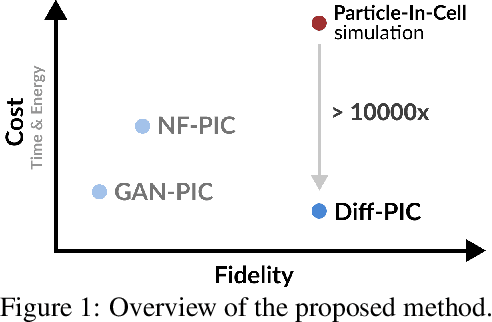
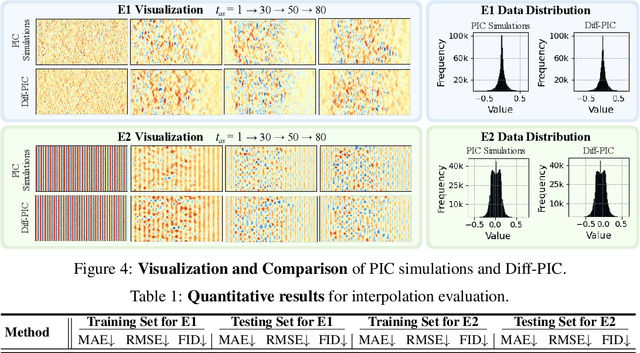
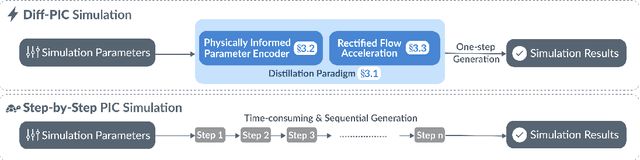
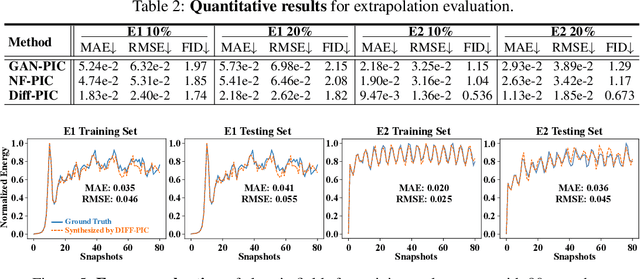
Sustainable energy is a crucial global challenge, and recent breakthroughs in nuclear fusion ignition underscore the potential of harnessing energy extracted from nuclear fusion in everyday life, thereby drawing significant attention to fusion ignition research, especially Laser-Plasma Interaction (LPI). Unfortunately, the complexity of LPI at ignition scale renders theory-based analysis nearly impossible -- instead, it has to rely heavily on Particle-in-Cell (PIC) simulations, which is extremely computationally intensive, making it a major bottleneck in advancing fusion ignition. In response, this work introduces Diff-PIC, a novel paradigm that leverages conditional diffusion models as a computationally efficient alternative to PIC simulations for generating high-fidelity scientific data. Specifically, we design a distillation paradigm to distill the physical patterns captured by PIC simulations into diffusion models, demonstrating both theoretical and practical feasibility. Moreover, to ensure practical effectiveness, we provide solutions for two critical challenges: (1) We develop a physically-informed conditional diffusion model that can learn and generate meaningful embeddings for mathematically continuous physical conditions. This model offers algorithmic generalization and adaptable transferability, effectively capturing the complex relationships between physical conditions and simulation outcomes; and (2) We employ the rectified flow technique to make our model a one-step conditional diffusion model, enhancing its efficiency further while maintaining high fidelity and physical validity. Diff-PIC establishes a new paradigm for using diffusion models to overcome the computational barriers in nuclear fusion research, setting a benchmark for future innovations and advancements in this field.
Inertial Confinement Fusion Forecasting via LLMs
Jul 15, 2024Controlled fusion energy is deemed pivotal for the advancement of human civilization. In this study, we introduce $\textbf{Fusion-LLM}$, a novel integration of Large Language Models (LLMs) with classical reservoir computing paradigms tailored to address challenges in Inertial Confinement Fusion ($\texttt{ICF}$). Our approach offers several key contributions: Firstly, we propose the $\textit{LLM-anchored Reservoir}$, augmented with a fusion-specific prompt, enabling accurate forecasting of hot electron dynamics during implosion. Secondly, we develop $\textit{Signal-Digesting Channels}$ to temporally and spatially describe the laser intensity across time, capturing the unique characteristics of $\texttt{ICF}$ inputs. Lastly, we design the $\textit{Confidence Scanner}$ to quantify the confidence level in forecasting, providing valuable insights for domain experts to design the $\texttt{ICF}$ process. Extensive experiments demonstrate the superior performance of our method, achieving 1.90 CAE, 0.14 $\texttt{top-1}$ MAE, and 0.11 $\texttt{top-5}$ MAE in predicting Hard X-ray ($\texttt{HXR}$) energies of $\texttt{ICF}$ tasks, which presents state-of-the-art comparisons against concurrent best systems. Additionally, we present $\textbf{Fusion4AI}$, the first $\texttt{ICF}$ benchmark based on physical experiments, aimed at fostering novel ideas in plasma physics research and enhancing the utility of LLMs in scientific exploration. Overall, our work strives to forge an innovative synergy between AI and plasma science for advancing fusion energy.