 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImageNet-RIB Benchmark: Large Pre-Training Datasets Don't Guarantee Robustness after Fine-Tuning
Oct 28, 2024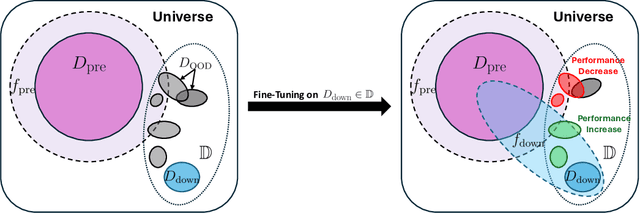
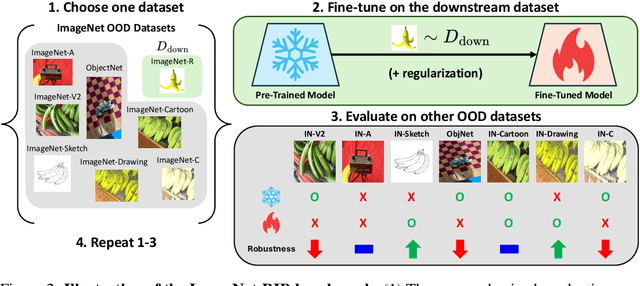

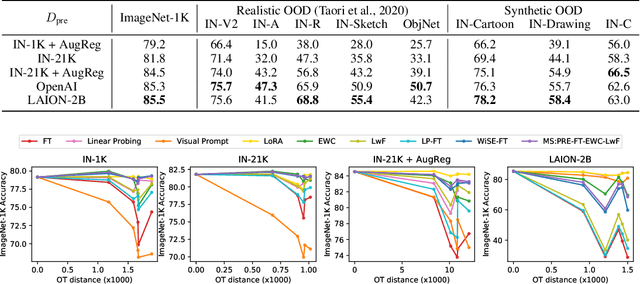
Highly performant large-scale pre-trained models promise to also provide a valuable foundation for learning specialized tasks, by fine-tuning the model to the desired task. By starting from a good general-purpose model, the goal is to achieve both specialization in the target task and maintain robustness. To assess the robustness of models to out-of-distribution samples after fine-tuning on downstream datasets, we introduce a new robust fine-tuning benchmark, ImageNet-RIB (Robustness Inheritance Benchmark). The benchmark consists of a set of related but distinct specialized (downstream) tasks; pre-trained models are fine-tuned on one task in the set and their robustness is assessed on the rest, iterating across all tasks for fine-tuning and assessment. We find that the continual learning methods, EWC and LwF maintain robustness after fine-tuning though fine-tuning generally does reduce performance on generalization to related downstream tasks across models. Not surprisingly, models pre-trained on large and rich datasets exhibit higher initial robustness across datasets and suffer more pronounced degradation during fine-tuning. The distance between the pre-training and downstream datasets, measured by optimal transport, predicts this performance degradation on the pre-training dataset. However, counterintuitively, model robustness after fine-tuning on related downstream tasks is the worst when the pre-training dataset is the richest and the most diverse. This suggests that starting with the strongest foundation model is not necessarily the best approach for performance on specialist tasks. The benchmark thus offers key insights for developing more resilient fine-tuning strategies and building robust machine learning models. https://jd730.github.io/projects/ImageNet-RIB
Breaking Neural Network Scaling Laws with Modularity
Sep 09, 2024



Modular neural networks outperform nonmodular neural networks on tasks ranging from visual question answering to robotics. These performance improvements are thought to be due to modular networks' superior ability to model the compositional and combinatorial structure of real-world problems. However, a theoretical explanation of how modularity improves generalizability, and how to leverage task modularity while training networks remains elusive. Using recent theoretical progress in explaining neural network generalization, we investigate how the amount of training data required to generalize on a task varies with the intrinsic dimensionality of a task's input. We show theoretically that when applied to modularly structured tasks, while nonmodular networks require an exponential number of samples with task dimensionality, modular networks' sample complexity is independent of task dimensionality: modular networks can generalize in high dimensions. We then develop a novel learning rule for modular networks to exploit this advantage and empirically show the improved generalization of the rule, both in- and out-of-distribution, on high-dimensional, modular tasks.
Towards Exact Computation of Inductive Bias
Jun 22, 2024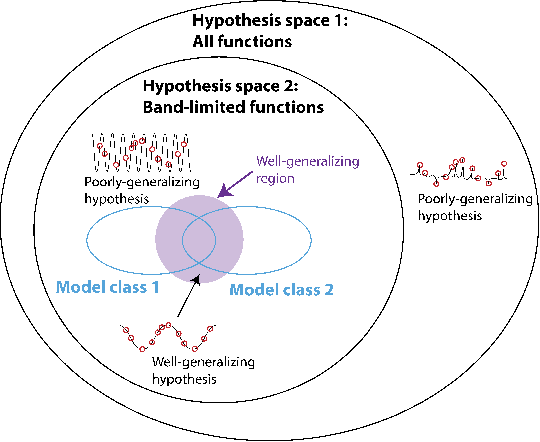

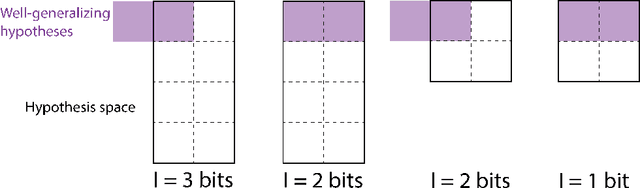
Much research in machine learning involves finding appropriate inductive biases (e.g. convolutional neural networks, momentum-based optimizers, transformers) to promote generalization on tasks. However, quantification of the amount of inductive bias associated with these architectures and hyperparameters has been limited. We propose a novel method for efficiently computing the inductive bias required for generalization on a task with a fixed training data budget; formally, this corresponds to the amount of information required to specify well-generalizing models within a specific hypothesis space of models. Our approach involves modeling the loss distribution of random hypotheses drawn from a hypothesis space to estimate the required inductive bias for a task relative to these hypotheses. Unlike prior work, our method provides a direct estimate of inductive bias without using bounds and is applicable to diverse hypothesis spaces. Moreover, we derive approximation error bounds for our estimation approach in terms of the number of sampled hypotheses. Consistent with prior results, our empirical results demonstrate that higher dimensional tasks require greater inductive bias. We show that relative to other expressive model classes, neural networks as a model class encode large amounts of inductive bias. Furthermore, our measure quantifies the relative difference in inductive bias between different neural network architectures. Our proposed inductive bias metric provides an information-theoretic interpretation of the benefits of specific model architectures for certain tasks and provides a quantitative guide to developing tasks requiring greater inductive bias, thereby encouraging the development of more powerful inductive biases.
Neuro-Inspired Fragmentation and Recall to Overcome Catastrophic Forgetting in Curiosity
Oct 26, 2023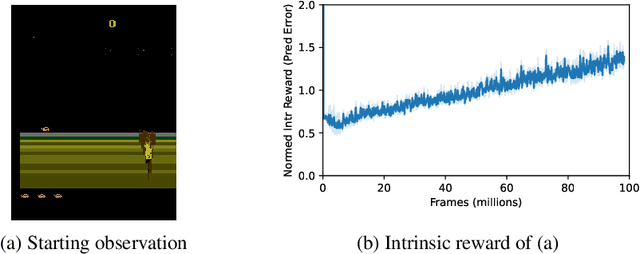
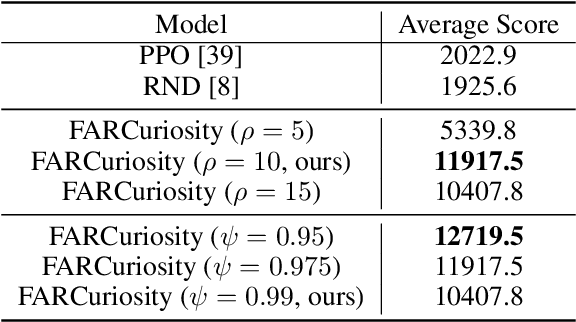
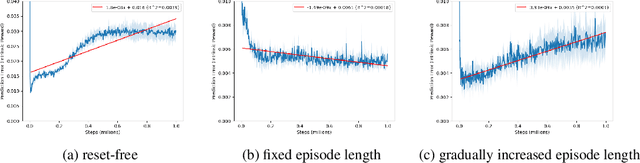

Deep reinforcement learning methods exhibit impressive performance on a range of tasks but still struggle on hard exploration tasks in large environments with sparse rewards. To address this, intrinsic rewards can be generated using forward model prediction errors that decrease as the environment becomes known, and incentivize an agent to explore novel states. While prediction-based intrinsic rewards can help agents solve hard exploration tasks, they can suffer from catastrophic forgetting and actually increase at visited states. We first examine the conditions and causes of catastrophic forgetting in grid world environments. We then propose a new method FARCuriosity, inspired by how humans and animals learn. The method depends on fragmentation and recall: an agent fragments an environment based on surprisal, and uses different local curiosity modules (prediction-based intrinsic reward functions) for each fragment so that modules are not trained on the entire environment. At each fragmentation event, the agent stores the current module in long-term memory (LTM) and either initializes a new module or recalls a previously stored module based on its match with the current state. With fragmentation and recall, FARCuriosity achieves less forgetting and better overall performance in games with varied and heterogeneous environments in the Atari benchmark suite of tasks. Thus, this work highlights the problem of catastrophic forgetting in prediction-based curiosity methods and proposes a solution.
Neuro-Inspired Efficient Map Building via Fragmentation and Recall
Jul 11, 2023Animals and robots navigate through environments by building and refining maps of the space. These maps enable functions including navigating back to home, planning, search, and foraging. In large environments, exploration of the space is a hard problem: agents can become stuck in local regions. Here, we use insights from neuroscience to propose and apply the concept of Fragmentation-and-Recall (FarMap), with agents solving the mapping problem by building local maps via a surprisal-based clustering of space, which they use to set subgoals for spatial exploration. Agents build and use a local map to predict their observations; high surprisal leads to a ``fragmentation event'' that truncates the local map. At these events, the recent local map is placed into long-term memory (LTM), and a different local map is initialized. If observations at a fracture point match observations in one of the stored local maps, that map is recalled (and thus reused) from LTM. The fragmentation points induce a natural online clustering of the larger space, forming a set of intrinsic potential subgoals that are stored in LTM as a topological graph. Agents choose their next subgoal from the set of near and far potential subgoals from within the current local map or LTM, respectively. Thus, local maps guide exploration locally, while LTM promotes global exploration. We evaluate FarMap on complex procedurally-generated spatial environments to demonstrate that this mapping strategy much more rapidly covers the environment (number of agent steps and wall clock time) and is more efficient in active memory usage, without loss of performance.
Model-agnostic Measure of Generalization Difficulty
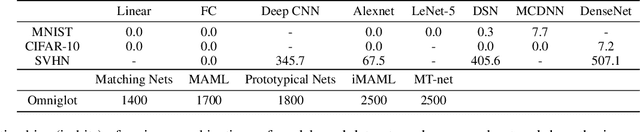
May 01, 2023The measure of a machine learning algorithm is the difficulty of the tasks it can perform, and sufficiently difficult tasks are critical drivers of strong machine learning models. However, quantifying the generalization difficulty of machine learning benchmarks has remained challenging. We propose what is to our knowledge the first model-agnostic measure of the inherent generalization difficulty of tasks. Our inductive bias complexity measure quantifies the total information required to generalize well on a task minus the information provided by the data. It does so by measuring the fractional volume occupied by hypotheses that generalize on a task given that they fit the training data. It scales exponentially with the intrinsic dimensionality of the space over which the model must generalize but only polynomially in resolution per dimension, showing that tasks which require generalizing over many dimensions are drastically more difficult than tasks involving more detail in fewer dimensions. Our measure can be applied to compute and compare supervised learning, reinforcement learning and meta-learning generalization difficulties against each other. We show that applied empirically, it formally quantifies intuitively expected trends, e.g. that in terms of required inductive bias, MNIST < CIFAR10 < Imagenet and fully observable Markov decision processes (MDPs) < partially observable MDPs. Further, we show that classification of complex images $<$ few-shot meta-learning with simple images. Our measure provides a quantitative metric to guide the construction of more complex tasks requiring greater inductive bias, and thereby encourages the development of more sophisticated architectures and learning algorithms with more powerful generalization capabilities.
Exemplar-Based Open-Set Panoptic Segmentation Network
May 19, 2021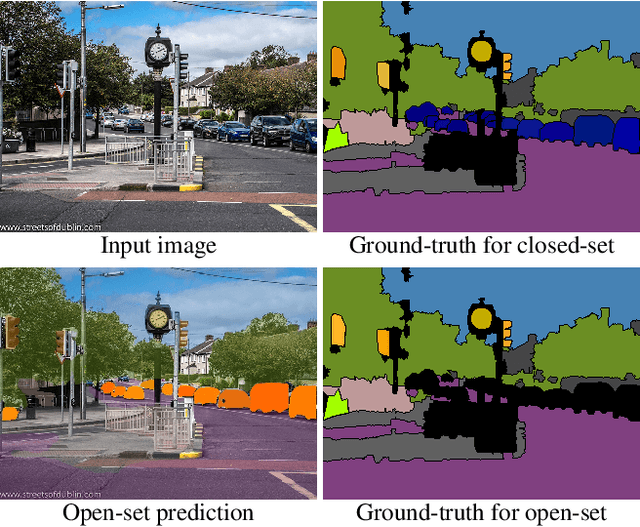
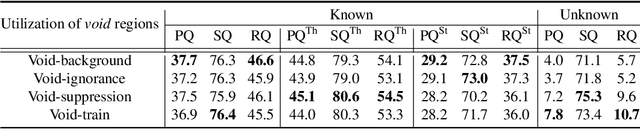
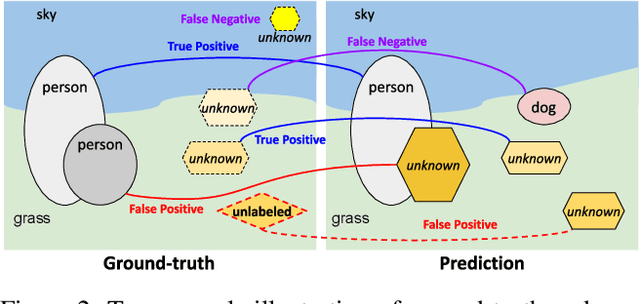
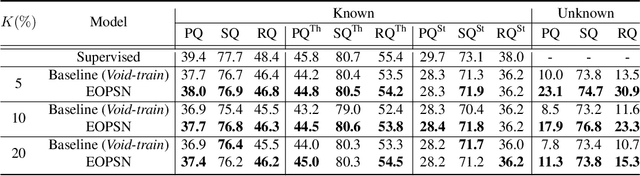
We extend panoptic segmentation to the open-world and introduce an open-set panoptic segmentation (OPS) task. This task requires performing panoptic segmentation for not only known classes but also unknown ones that have not been acknowledged during training. We investigate the practical challenges of the task and construct a benchmark on top of an existing dataset, COCO. In addition, we propose a novel exemplar-based open-set panoptic segmentation network (EOPSN) inspired by exemplar theory. Our approach identifies a new class based on exemplars, which are identified by clustering and employed as pseudo-ground-truths. The size of each class increases by mining new exemplars based on the similarities to the existing ones associated with the class. We evaluate EOPSN on the proposed benchmark and demonstrate the effectiveness of our proposals. The primary goal of our work is to draw the attention of the community to the recognition in the open-world scenarios. The implementation of our algorithm is available on the project webpage: https://cv.snu.ac.kr/research/EOPSN.
Weakly Supervised Instance Segmentation by Deep Community Learning
Mar 06, 2020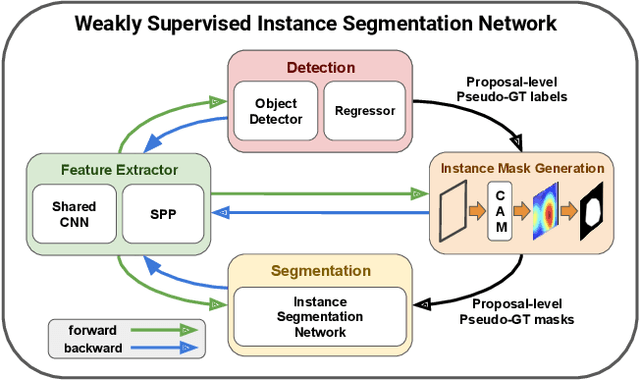
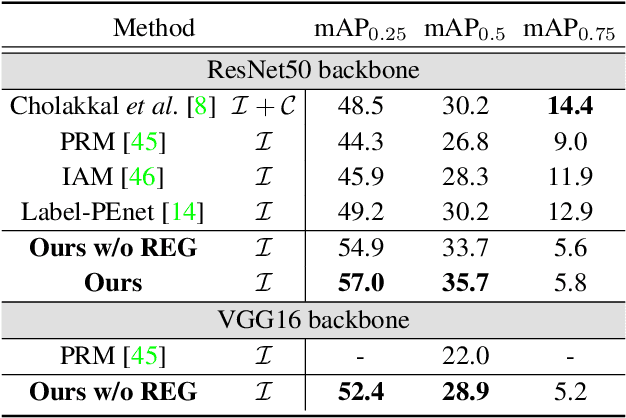
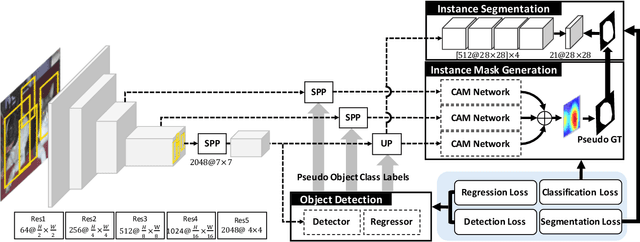
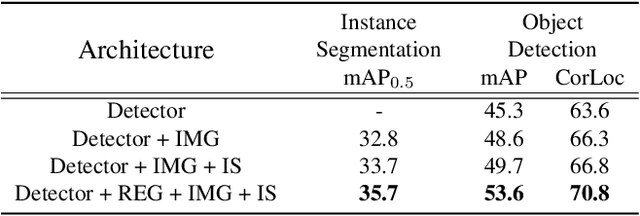
We present a weakly supervised instance segmentation algorithm based on deep community learning with multiple tasks. This task is formulated as a combination of weakly supervised object detection and semantic segmentation, where individual objects of the same class are identified and segmented separately. We address this problem by designing a unified deep neural network architecture, which has a positive feedback loop of object detection with bounding box regression, instance mask generation, instance segmentation, and feature extraction. Each component of the network makes active interactions with others to improve accuracy, and the end-to-end trainability of our model makes our results more robust and reproducible. The proposed algorithm achieves state-of-the-art performance in the weakly supervised setting without any additional training such as Fast R-CNN and Mask R-CNN on the standard benchmark dataset.