 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitive Weave: Synthesizing Abstracted Knowledge with a Spatio-Temporal Resonance Graph
Jun 09, 2025The emergence of capable large language model (LLM) based agents necessitates memory architectures that transcend mere data storage, enabling continuous learning, nuanced reasoning, and dynamic adaptation. Current memory systems often grapple with fundamental limitations in structural flexibility, temporal awareness, and the ability to synthesize higher-level insights from raw interaction data. This paper introduces Cognitive Weave, a novel memory framework centered around a multi-layered spatio-temporal resonance graph (STRG). This graph manages information as semantically rich insight particles (IPs), which are dynamically enriched with resonance keys, signifiers, and situational imprints via a dedicated semantic oracle interface (SOI). These IPs are interconnected through typed relational strands, forming an evolving knowledge tapestry. A key component of Cognitive Weave is the cognitive refinement process, an autonomous mechanism that includes the synthesis of insight aggregates (IAs) condensed, higher-level knowledge structures derived from identified clusters of related IPs. We present comprehensive experimental results demonstrating Cognitive Weave's marked enhancement over existing approaches in long-horizon planning tasks, evolving question-answering scenarios, and multi-session dialogue coherence. The system achieves a notable 34% average improvement in task completion rates and a 42% reduction in mean query latency when compared to state-of-the-art baselines. Furthermore, this paper explores the ethical considerations inherent in such advanced memory systems, discusses the implications for long-term memory in LLMs, and outlines promising future research trajectories.
Kanana: Compute-efficient Bilingual Language Models
Feb 26, 2025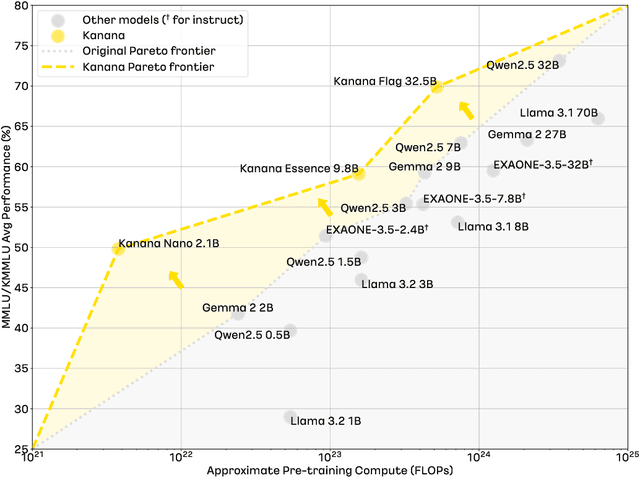



We introduce Kanana, a series of bilingual language models that demonstrate exceeding performance in Korean and competitive performance in English. The computational cost of Kanana is significantly lower than that of state-of-the-art models of similar size. The report details the techniques employed during pre-training to achieve compute-efficient yet competitive models, including high quality data filtering, staged pre-training, depth up-scaling, and pruning and distillation. Furthermore, the report outlines the methodologies utilized during the post-training of the Kanana models, encompassing supervised fine-tuning and preference optimization, aimed at enhancing their capability for seamless interaction with users. Lastly, the report elaborates on plausible approaches used for language model adaptation to specific scenarios, such as embedding, retrieval augmented generation, and function calling. The Kanana model series spans from 2.1B to 32.5B parameters with 2.1B models (base, instruct, embedding) publicly released to promote research on Korean language models.
Controlled Text Generation for Black-box Language Models via Score-based Progressive Editor
Nov 13, 2023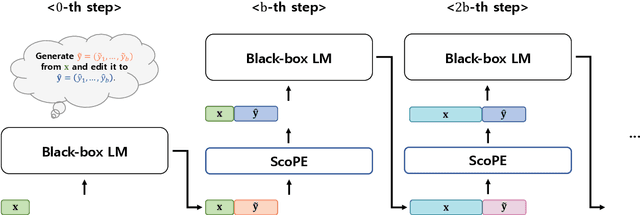


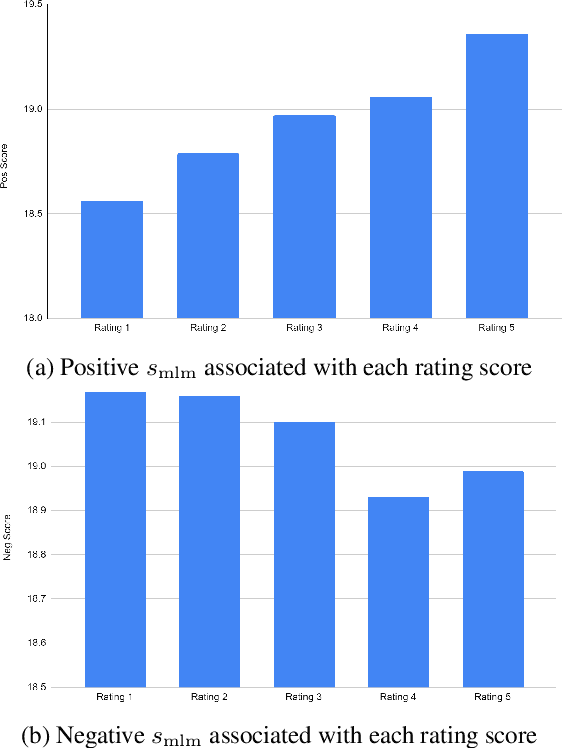
Despite recent progress in language models, generating constrained text for specific domains remains a challenge, particularly when utilizing black-box models that lack domain-specific knowledge. In this paper, we introduce ScoPE (Score-based Progressive Editor) generation, a novel approach for controlled text generation for black-box language models. We employ ScoPE to facilitate text generation in the target domain by integrating it with language models through a cascading approach. Trained to enhance the target domain score of the edited text, ScoPE progressively edits intermediate output discrete tokens to align with the target attributes throughout the auto-regressive generation process of the language model. This iterative process guides subsequent steps to produce desired output texts for the target domain. Our experimental results on diverse controlled generations demonstrate that ScoPE effectively facilitates controlled text generation for black-box language models in both in-domain and out-of-domain conditions, which is challenging for existing methods.
Learning Terrain-Aware Kinodynamic Model for Autonomous Off-Road Rally Driving With Model Predictive Path Integral Control
May 01, 2023High-speed autonomous driving in off-road environments has immense potential for various applications, but it also presents challenges due to the complexity of vehicle-terrain interactions. In such environments, it is crucial for the vehicle to predict its motion and adjust its controls proactively in response to environmental changes, such as variations in terrain elevation. To this end, we propose a method for learning terrain-aware kinodynamic model which is conditioned on both proprioceptive and exteroceptive information. The proposed model generates reliable predictions of 6-degree-of-freedom motion and can even estimate contact interactions without requiring ground truth force data during training. This enables the design of a safe and robust model predictive controller through appropriate cost function design which penalizes sampled trajectories with unstable motion, unsafe interactions, and high levels of uncertainty derived from the model. We demonstrate the effectiveness of our approach through experiments on a simulated off-road track, showing that our proposed model-controller pair outperforms the baseline and ensures robust high-speed driving performance without control failure.
Learning-based Uncertainty-aware Navigation in 3D Off-Road Terrains
Sep 19, 2022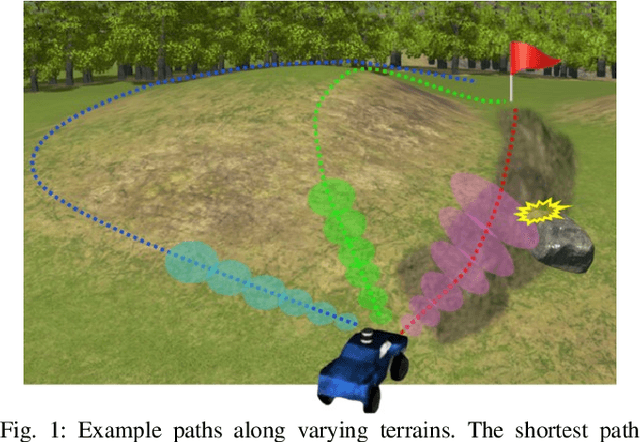

This paper presents a safe, efficient, and agile ground vehicle navigation algorithm for 3D off-road terrain environments. Off-road navigation is subject to uncertain vehicle-terrain interactions caused by different terrain conditions on top of 3D terrain topology. The existing works are limited to adopt overly simplified vehicle-terrain models. The proposed algorithm learns the terrain-induced uncertainties from driving data and encodes the learned uncertainty distribution into the traversability cost for path evaluation. The navigation path is then designed to optimize the uncertainty-aware traversability cost, resulting in a safe and agile vehicle maneuver. Assuring real-time execution, the algorithm is further implemented within parallel computation architecture running on Graphics Processing Units (GPU).
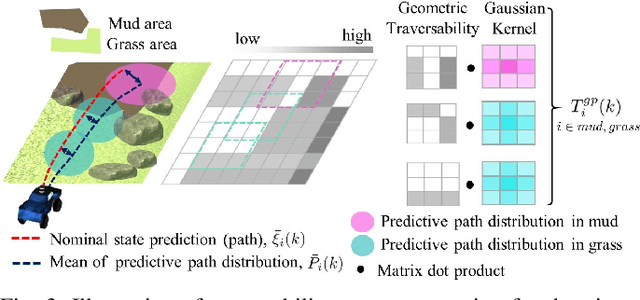
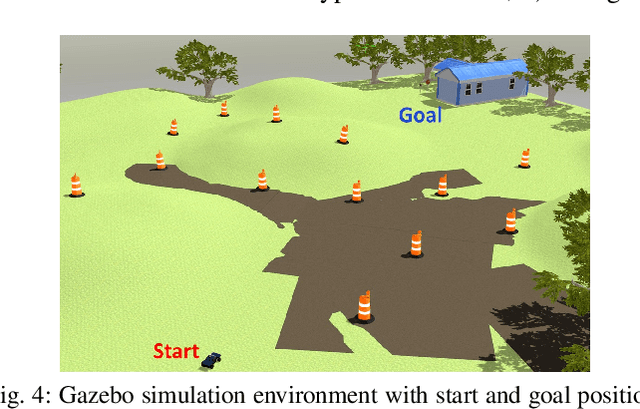
Physics Embedded Neural Network Vehicle Model and Applications in Risk-Aware Autonomous Driving Using Latent Features
Jul 16, 2022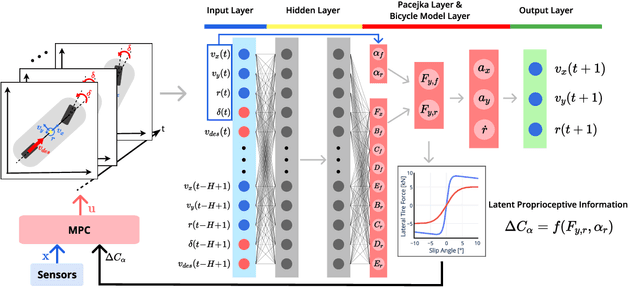
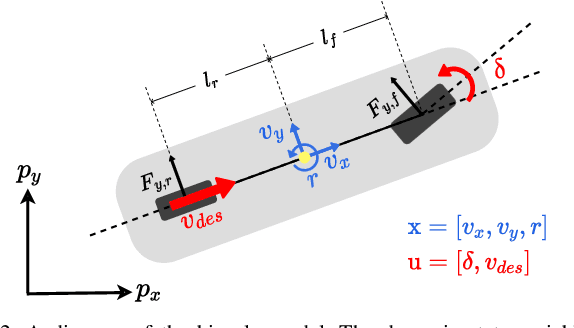
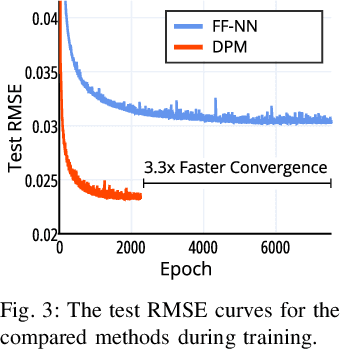
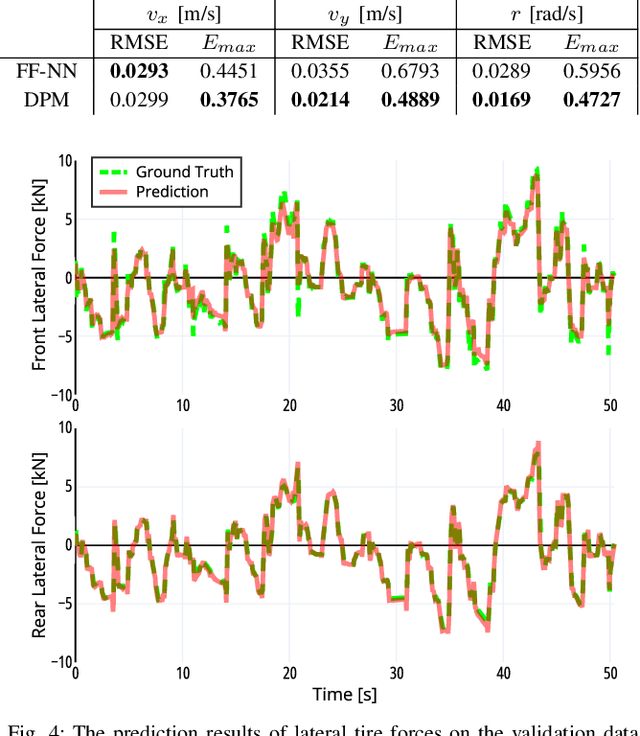
Non-holonomic vehicle motion has been studied extensively using physics-based models. Common approaches when using these models interpret the wheel/ground interactions using a linear tire model and thus may not fully capture the nonlinear and complex dynamics under various environments. On the other hand, neural network models have been widely employed in this domain, demonstrating powerful function approximation capabilities. However, these black-box learning strategies completely abandon the existing knowledge of well-known physics. In this paper, we seamlessly combine deep learning with a fully differentiable physics model to endow the neural network with available prior knowledge. The proposed model shows better generalization performance than the vanilla neural network model by a large margin. We also show that the latent features of our model can accurately represent lateral tire forces without the need for any additional training. Lastly, We develop a risk-aware model predictive controller using proprioceptive information derived from the latent features. We validate our idea in two autonomous driving tasks under unknown friction, outperforming the baseline control framework.
TOAST: Trajectory Optimization and Simultaneous Tracking using Shared Neural Network Dynamics
Jan 21, 2022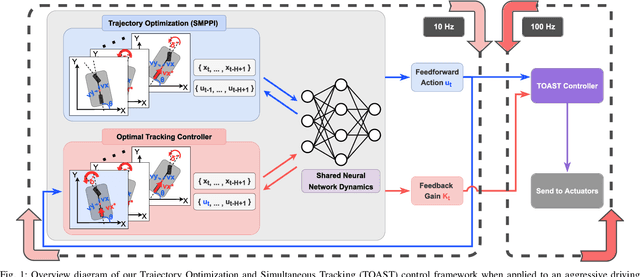
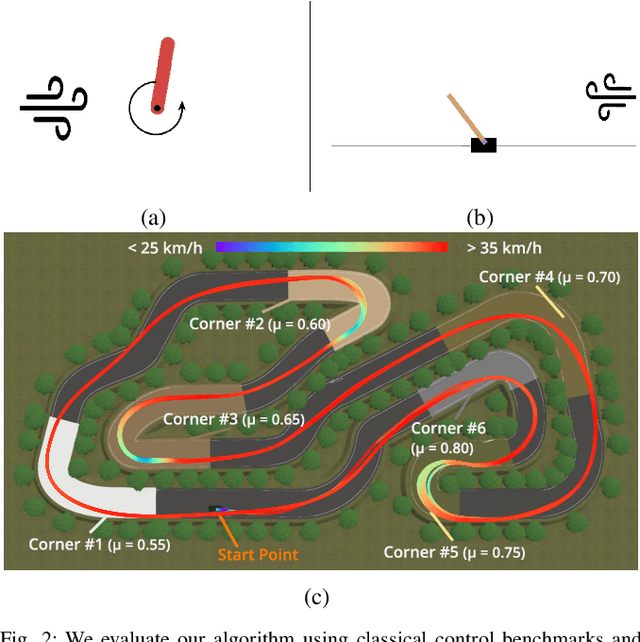
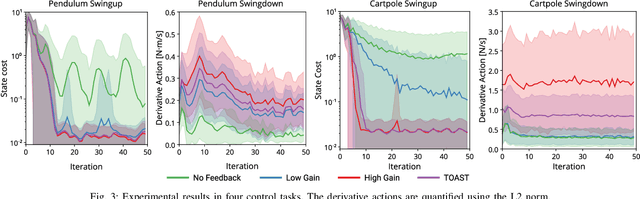
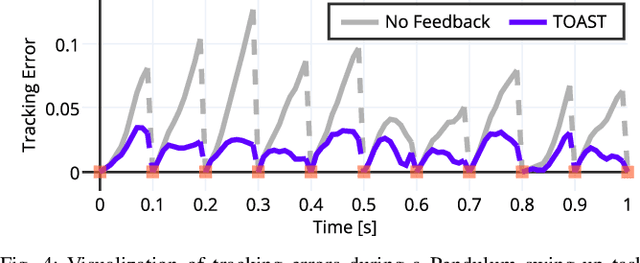
Neural networks have been increasingly employed in Model Predictive Controller (MPC) to control nonlinear dynamic systems. However, MPC still poses a problem that an achievable update rate is insufficient to cope with model uncertainty and external disturbances. In this paper, we present a novel control scheme that can design an optimal tracking controller using the neural network dynamics of the MPC, making it possible to be applied as a plug-and-play extension for any existing model-based feedforward controller. We also describe how our method handles a neural network containing historical information, which does not follow a general form of dynamics. The proposed method is evaluated by its performance in classical control benchmarks with external disturbances. We also extend our control framework to be applied in an aggressive autonomous driving task with unknown friction. In all experiments, our method outperformed the compared methods by a large margin. Our controller also showed low control chattering levels, demonstrating that our feedback controller does not interfere with the optimal command of MPC.
Human Driving Skill Modeling Using Neural Networks for Haptic Assistance in Realistic Virtual Environments
Sep 12, 2018
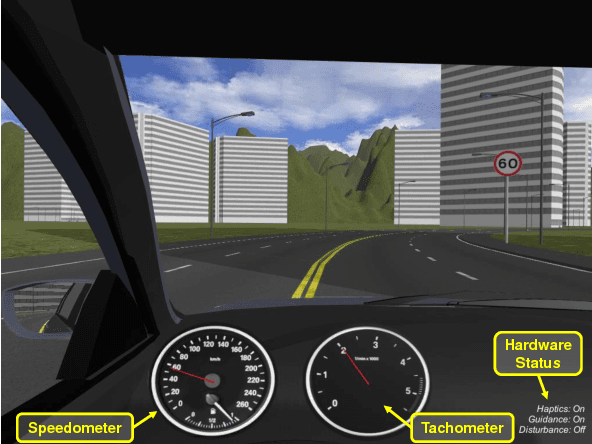
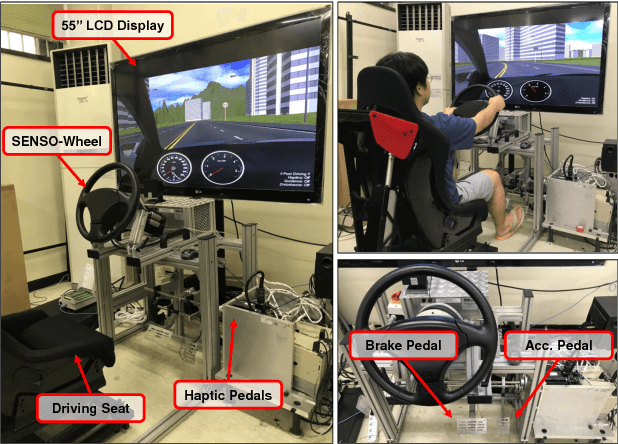
This work addresses our research on driving skill modeling using artificial neural networks for haptic assistance. In this paper, we present a haptic driving training simulator with performance-based, error-corrective haptic feedback. One key component of our simulator is the ability to learn an optimized driving skill model from the driving data of expert drivers. To this end, we obtain a model utilizing artificial neural networks to extract a desired movement of a steering wheel and an accelerator pedal based on the experts' prediction. Then, we can deliver haptic assistance based on a driver's performance error which is a difference between a current and the desired movement. We validate the performance of our framework in two respective user experiments recruiting expert/novice drivers to show the feasibility and applicability of facilitating neural networks for performance-based haptic driving skill transfer.