 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Active Exploration and Uncertainty-Aware Deployment Using Probabilistic Ensemble Neural Network Dynamics
May 20, 2023In recent years, learning-based control in robotics has gained significant attention due to its capability to address complex tasks in real-world environments. With the advances in machine learning algorithms and computational capabilities, this approach is becoming increasingly important for solving challenging control problems in robotics by learning unknown or partially known robot dynamics. Active exploration, in which a robot directs itself to states that yield the highest information gain, is essential for efficient data collection and minimizing human supervision. Similarly, uncertainty-aware deployment has been a growing concern in robotic control, as uncertain actions informed by the learned model can lead to unstable motions or failure. However, active exploration and uncertainty-aware deployment have been studied independently, and there is limited literature that seamlessly integrates them. This paper presents a unified model-based reinforcement learning framework that bridges these two tasks in the robotics control domain. Our framework uses a probabilistic ensemble neural network for dynamics learning, allowing the quantification of epistemic uncertainty via Jensen-Renyi Divergence. The two opposing tasks of exploration and deployment are optimized through state-of-the-art sampling-based MPC, resulting in efficient collection of training data and successful avoidance of uncertain state-action spaces. We conduct experiments on both autonomous vehicles and wheeled robots, showing promising results for both exploration and deployment.
TOAST: Trajectory Optimization and Simultaneous Tracking using Shared Neural Network Dynamics
Jan 21, 2022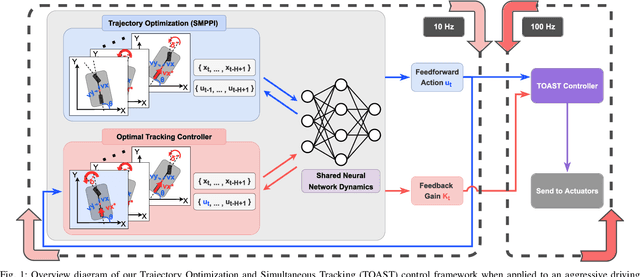
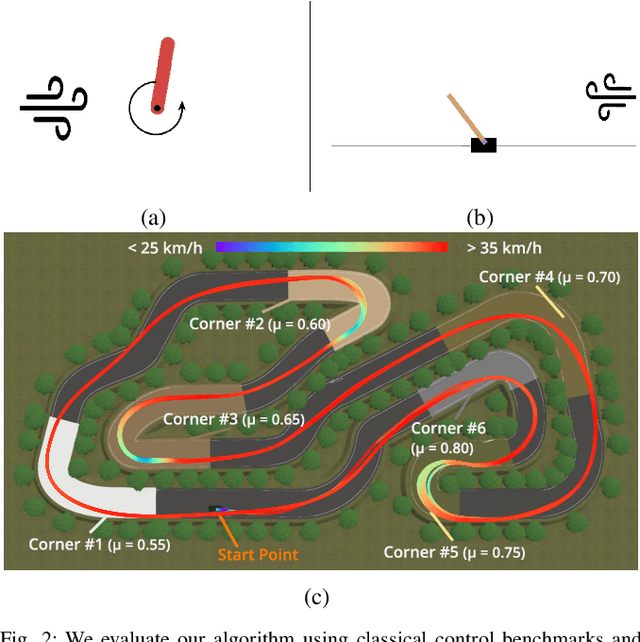
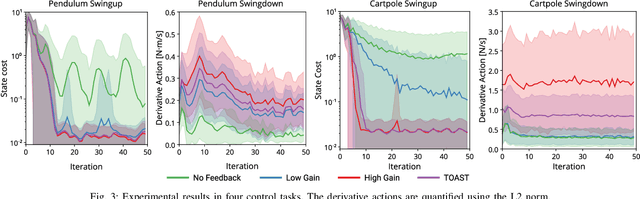
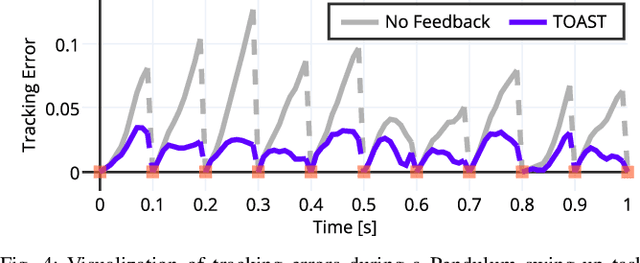
Neural networks have been increasingly employed in Model Predictive Controller (MPC) to control nonlinear dynamic systems. However, MPC still poses a problem that an achievable update rate is insufficient to cope with model uncertainty and external disturbances. In this paper, we present a novel control scheme that can design an optimal tracking controller using the neural network dynamics of the MPC, making it possible to be applied as a plug-and-play extension for any existing model-based feedforward controller. We also describe how our method handles a neural network containing historical information, which does not follow a general form of dynamics. The proposed method is evaluated by its performance in classical control benchmarks with external disturbances. We also extend our control framework to be applied in an aggressive autonomous driving task with unknown friction. In all experiments, our method outperformed the compared methods by a large margin. Our controller also showed low control chattering levels, demonstrating that our feedback controller does not interfere with the optimal command of MPC.