 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Terrain-Aware Kinodynamic Model for Autonomous Off-Road Rally Driving With Model Predictive Path Integral Control
May 01, 2023High-speed autonomous driving in off-road environments has immense potential for various applications, but it also presents challenges due to the complexity of vehicle-terrain interactions. In such environments, it is crucial for the vehicle to predict its motion and adjust its controls proactively in response to environmental changes, such as variations in terrain elevation. To this end, we propose a method for learning terrain-aware kinodynamic model which is conditioned on both proprioceptive and exteroceptive information. The proposed model generates reliable predictions of 6-degree-of-freedom motion and can even estimate contact interactions without requiring ground truth force data during training. This enables the design of a safe and robust model predictive controller through appropriate cost function design which penalizes sampled trajectories with unstable motion, unsafe interactions, and high levels of uncertainty derived from the model. We demonstrate the effectiveness of our approach through experiments on a simulated off-road track, showing that our proposed model-controller pair outperforms the baseline and ensures robust high-speed driving performance without control failure.
Physics Embedded Neural Network Vehicle Model and Applications in Risk-Aware Autonomous Driving Using Latent Features
Jul 16, 2022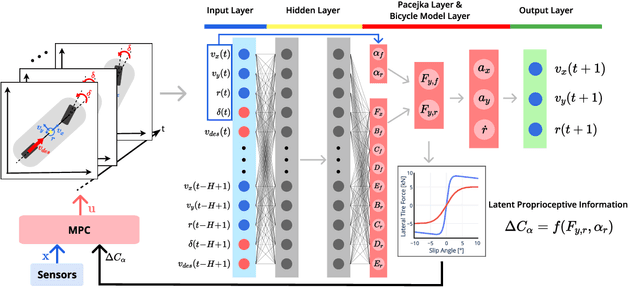
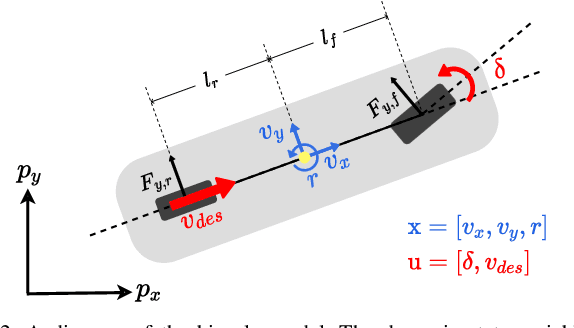
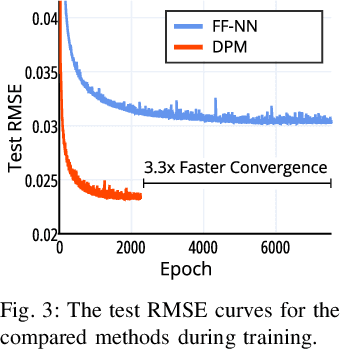
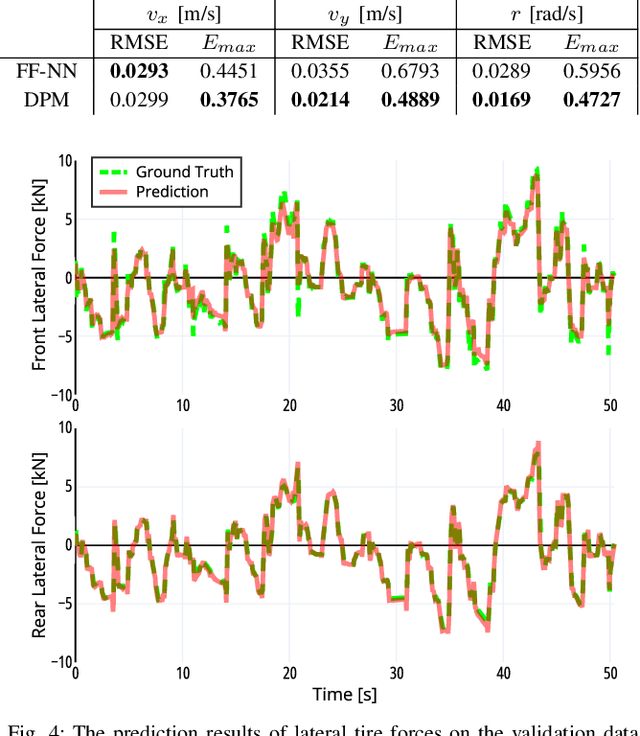
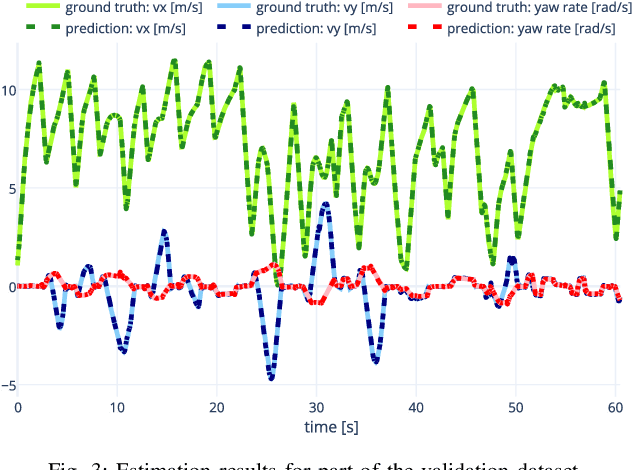
Non-holonomic vehicle motion has been studied extensively using physics-based models. Common approaches when using these models interpret the wheel/ground interactions using a linear tire model and thus may not fully capture the nonlinear and complex dynamics under various environments. On the other hand, neural network models have been widely employed in this domain, demonstrating powerful function approximation capabilities. However, these black-box learning strategies completely abandon the existing knowledge of well-known physics. In this paper, we seamlessly combine deep learning with a fully differentiable physics model to endow the neural network with available prior knowledge. The proposed model shows better generalization performance than the vanilla neural network model by a large margin. We also show that the latent features of our model can accurately represent lateral tire forces without the need for any additional training. Lastly, We develop a risk-aware model predictive controller using proprioceptive information derived from the latent features. We validate our idea in two autonomous driving tasks under unknown friction, outperforming the baseline control framework.
TOAST: Trajectory Optimization and Simultaneous Tracking using Shared Neural Network Dynamics
Jan 21, 2022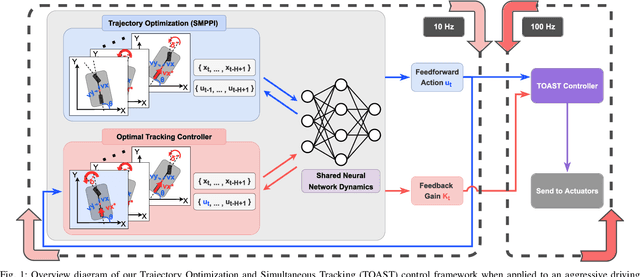
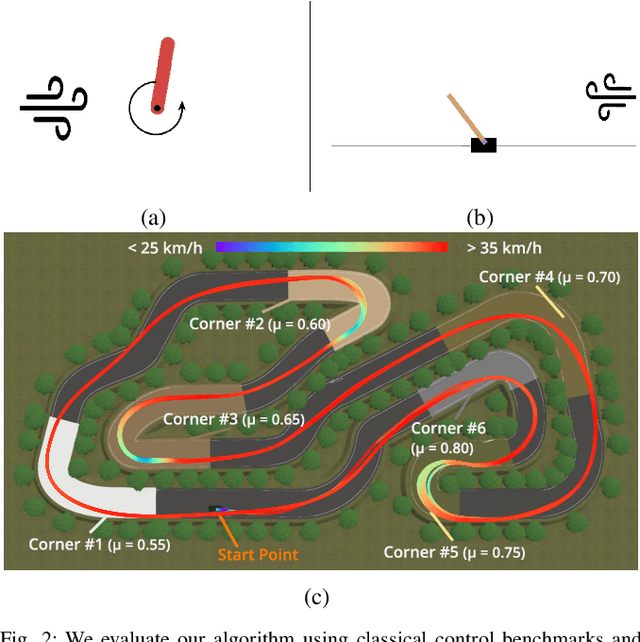
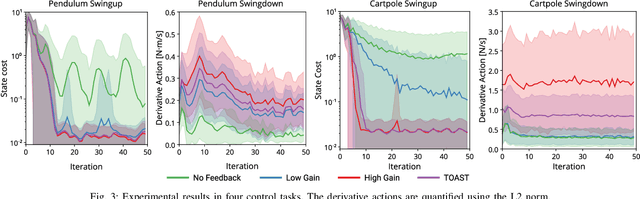
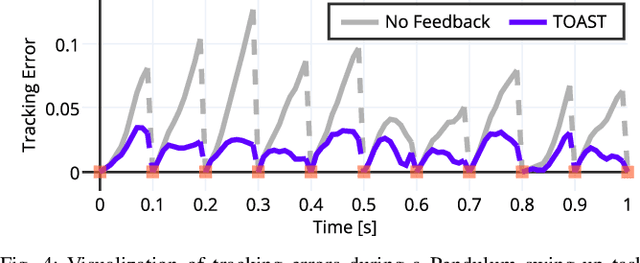
Neural networks have been increasingly employed in Model Predictive Controller (MPC) to control nonlinear dynamic systems. However, MPC still poses a problem that an achievable update rate is insufficient to cope with model uncertainty and external disturbances. In this paper, we present a novel control scheme that can design an optimal tracking controller using the neural network dynamics of the MPC, making it possible to be applied as a plug-and-play extension for any existing model-based feedforward controller. We also describe how our method handles a neural network containing historical information, which does not follow a general form of dynamics. The proposed method is evaluated by its performance in classical control benchmarks with external disturbances. We also extend our control framework to be applied in an aggressive autonomous driving task with unknown friction. In all experiments, our method outperformed the compared methods by a large margin. Our controller also showed low control chattering levels, demonstrating that our feedback controller does not interfere with the optimal command of MPC.
Derivative Action Control: Smooth Model Predictive Path Integral Control without Smoothing
Jan 13, 2022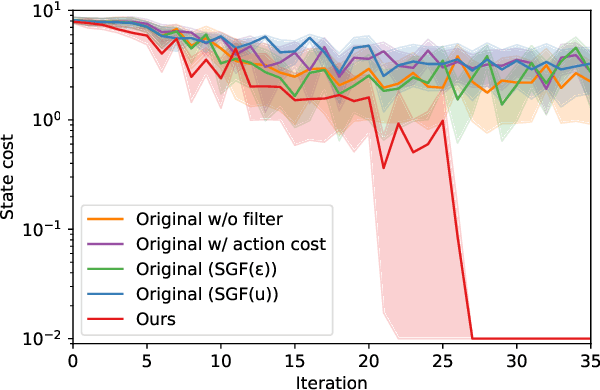


Here, we present a new approach to generate smooth control sequences in Model Predictive Path Integral control (MPPI) tasks without any additional smoothing algorithms. Our method effectively alleviates the chattering in sampling, while the information theoretic derivation of MPPI remains the same. We demonstrated the proposed method in a challenging autonomous driving task with quantitative evaluation of different algorithms. A neural network vehicle model for estimating system dynamics under varying road friction conditions is also presented. Our video can be found at: \url{https://youtu.be/o3Nmi0UJFqg}.