 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrack-centric Iterative Learning for Global Trajectory Optimization in Autonomous Racing
Jan 28, 2026This paper presents a global trajectory optimization framework for minimizing lap time in autonomous racing under uncertain vehicle dynamics. Optimizing the trajectory over the full racing horizon is computationally expensive, and tracking such a trajectory in the real world hardly assures global optimality due to uncertain dynamics. Yet, existing work mostly focuses on dynamics learning at the tracking level, without updating the trajectory itself to account for the learned dynamics. To address these challenges, we propose a track-centric approach that directly learns and optimizes the full-horizon trajectory. We first represent trajectories through a track-agnostic parametric space in light of the wavelet transform. This space is then efficiently explored using Bayesian optimization, where the lap time of each candidate is evaluated by running simulations with the learned dynamics. This optimization is embedded in an iterative learning framework, where the optimized trajectory is deployed to collect real-world data for updating the dynamics, progressively refining the trajectory over the iterations. The effectiveness of the proposed framework is validated through simulations and real-world experiments, demonstrating lap time improvement of up to 20.7% over a nominal baseline and consistently outperforming state-of-the-art methods.
Learning-based Uncertainty-aware Navigation in 3D Off-Road Terrains
Sep 19, 2022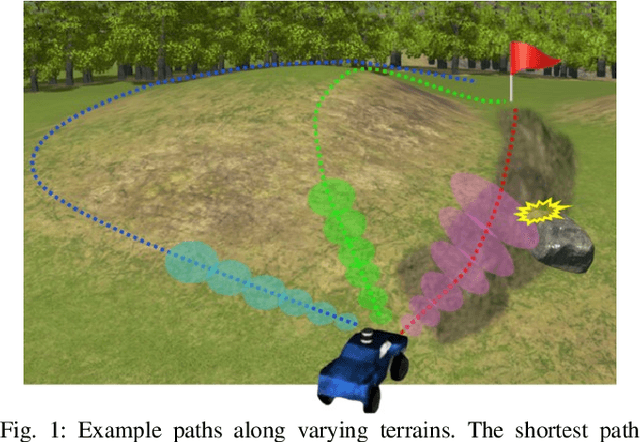

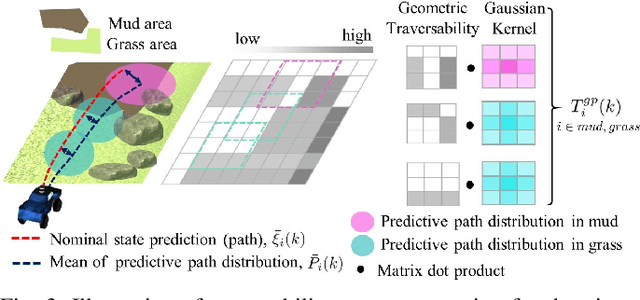
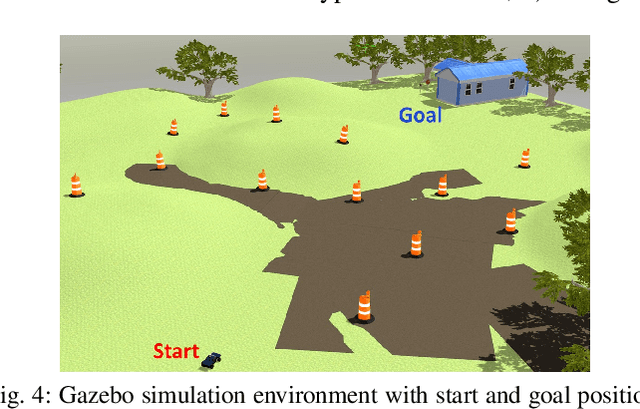
This paper presents a safe, efficient, and agile ground vehicle navigation algorithm for 3D off-road terrain environments. Off-road navigation is subject to uncertain vehicle-terrain interactions caused by different terrain conditions on top of 3D terrain topology. The existing works are limited to adopt overly simplified vehicle-terrain models. The proposed algorithm learns the terrain-induced uncertainties from driving data and encodes the learned uncertainty distribution into the traversability cost for path evaluation. The navigation path is then designed to optimize the uncertainty-aware traversability cost, resulting in a safe and agile vehicle maneuver. Assuring real-time execution, the algorithm is further implemented within parallel computation architecture running on Graphics Processing Units (GPU).