 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRina: Enhancing Ring-AllReduce with In-network Aggregation in Distributed Model Training
Jul 29, 2024Parameter Server (PS) and Ring-AllReduce (RAR) are two widely utilized synchronization architectures in multi-worker Deep Learning (DL), also referred to as Distributed Deep Learning (DDL). However, PS encounters challenges with the ``incast'' issue, while RAR struggles with problems caused by the long dependency chain. The emerging In-network Aggregation (INA) has been proposed to integrate with PS to mitigate its incast issue. However, such PS-based INA has poor incremental deployment abilities as it requires replacing all the switches to show significant performance improvement, which is not cost-effective. In this study, we present the incorporation of INA capabilities into RAR, called RAR with In-Network Aggregation (Rina), to tackle both the problems above. Rina features its agent-worker mechanism. When an INA-capable ToR switch is deployed, all workers in this rack run as one abstracted worker with the help of the agent, resulting in both excellent incremental deployment capabilities and better throughput. We conducted extensive testbed and simulation evaluations to substantiate the throughput advantages of Rina over existing DDL training synchronization structures. Compared with the state-of-the-art PS-based INA methods ATP, Rina can achieve more than 50\% throughput with the same hardware cost.
Uncertainty-aware Traffic Prediction under Missing Data
Sep 15, 2023



Traffic prediction is a crucial topic because of its broad scope of applications in the transportation domain. Recently, various studies have achieved promising results. However, most studies assume the prediction locations have complete or at least partial historical records and cannot be extended to non-historical recorded locations. In real-life scenarios, the deployment of sensors could be limited due to budget limitations and installation availability, which makes most current models not applicable. Though few pieces of literature tried to impute traffic states at the missing locations, these methods need the data simultaneously observed at the locations with sensors, making them not applicable to prediction tasks. Another drawback is the lack of measurement of uncertainty in prediction, making prior works unsuitable for risk-sensitive tasks or involving decision-making. To fill the gap, inspired by the previous inductive graph neural network, this work proposed an uncertainty-aware framework with the ability to 1) extend prediction to missing locations with no historical records and significantly extend spatial coverage of prediction locations while reducing deployment of sensors and 2) generate probabilistic prediction with uncertainty quantification to help the management of risk and decision making in the down-stream tasks. Through extensive experiments on real-life datasets, the result shows our method achieved promising results on prediction tasks, and the uncertainty quantification gives consistent results which highly correlated with the locations with and without historical data. We also show that our model could help support sensor deployment tasks in the transportation field to achieve higher accuracy with a limited sensor deployment budget.
LLM Powered Sim-to-real Transfer for Traffic Signal Control
Sep 04, 2023Numerous solutions are proposed for the Traffic Signal Control (TSC) tasks aiming to provide efficient transportation and mitigate congestion waste. In recent, promising results have been attained by Reinforcement Learning (RL) methods through trial and error in simulators, bringing confidence in solving cities' congestion headaches. However, there still exist performance gaps when simulator-trained policies are deployed to the real world. This issue is mainly introduced by the system dynamic difference between the training simulator and the real-world environments. The Large Language Models (LLMs) are trained on mass knowledge and proved to be equipped with astonishing inference abilities. In this work, we leverage LLMs to understand and profile the system dynamics by a prompt-based grounded action transformation. Accepting the cloze prompt template, and then filling in the answer based on accessible context, the pre-trained LLM's inference ability is exploited and applied to understand how weather conditions, traffic states, and road types influence traffic dynamics, being aware of this, the policies' action is taken and grounded based on realistic dynamics, thus help the agent learn a more realistic policy. We conduct experiments using DQN to show the effectiveness of the proposed PromptGAT's ability in mitigating the performance gap from simulation to reality (sim-to-real).
RegExplainer: Generating Explanations for Graph Neural Networks in Regression Task
Jul 25, 2023Graph regression is a fundamental task and has received increasing attention in a wide range of graph learning tasks. However, the inference process is often not interpretable. Most existing explanation techniques are limited to understanding GNN behaviors in classification tasks. In this work, we seek an explanation to interpret the graph regression models (XAIG-R). We show that existing methods overlook the distribution shifting and continuously ordered decision boundary, which hinders them away from being applied in the regression tasks. To address these challenges, we propose a novel objective based on the information bottleneck theory and introduce a new mix-up framework, which could support various GNNs in a model-agnostic manner. We further present a contrastive learning strategy to tackle the continuously ordered labels in regression task. To empirically verify the effectiveness of the proposed method, we introduce three benchmark datasets and a real-life dataset for evaluation. Extensive experiments show the effectiveness of the proposed method in interpreting GNN models in regression tasks.
Uncertainty-aware Grounded Action Transformation towards Sim-to-Real Transfer for Traffic Signal Control
Jul 23, 2023Traffic signal control (TSC) is a complex and important task that affects the daily lives of millions of people. Reinforcement Learning (RL) has shown promising results in optimizing traffic signal control, but current RL-based TSC methods are mainly trained in simulation and suffer from the performance gap between simulation and the real world. In this paper, we propose a simulation-to-real-world (sim-to-real) transfer approach called UGAT, which transfers a learned policy trained from a simulated environment to a real-world environment by dynamically transforming actions in the simulation with uncertainty to mitigate the domain gap of transition dynamics. We evaluate our method on a simulated traffic environment and show that it significantly improves the performance of the transferred RL policy in the real world.
Reinforcement Learning Approaches for Traffic Signal Control under Missing Data
Apr 25, 2023



The emergence of reinforcement learning (RL) methods in traffic signal control tasks has achieved better performance than conventional rule-based approaches. Most RL approaches require the observation of the environment for the agent to decide which action is optimal for a long-term reward. However, in real-world urban scenarios, missing observation of traffic states may frequently occur due to the lack of sensors, which makes existing RL methods inapplicable on road networks with missing observation. In this work, we aim to control the traffic signals in a real-world setting, where some of the intersections in the road network are not installed with sensors and thus with no direct observations around them. To the best of our knowledge, we are the first to use RL methods to tackle the traffic signal control problem in this real-world setting. Specifically, we propose two solutions: the first one imputes the traffic states to enable adaptive control, and the second one imputes both states and rewards to enable adaptive control and the training of RL agents. Through extensive experiments on both synthetic and real-world road network traffic, we reveal that our method outperforms conventional approaches and performs consistently with different missing rates. We also provide further investigations on how missing data influences the performance of our model.
LibSignal: An Open Library for Traffic Signal Control
Nov 19, 2022This paper introduces a library for cross-simulator comparison of reinforcement learning models in traffic signal control tasks. This library is developed to implement recent state-of-the-art reinforcement learning models with extensible interfaces and unified cross-simulator evaluation metrics. It supports commonly-used simulators in traffic signal control tasks, including Simulation of Urban MObility(SUMO) and CityFlow, and multiple benchmark datasets for fair comparisons. We conducted experiments to validate our implementation of the models and to calibrate the simulators so that the experiments from one simulator could be referential to the other. Based on the validated models and calibrated environments, this paper compares and reports the performance of current state-of-the-art RL algorithms across different datasets and simulators. This is the first time that these methods have been compared fairly under the same datasets with different simulators.
Modeling Network-level Traffic Flow Transitions on Sparse Data
Aug 13, 2022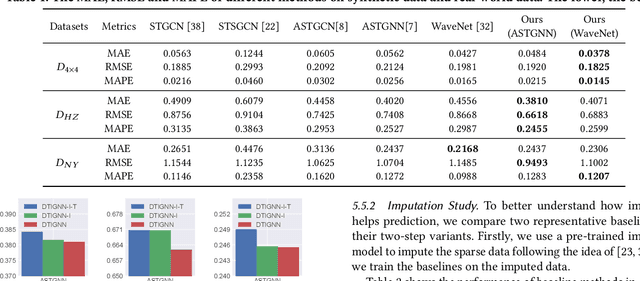
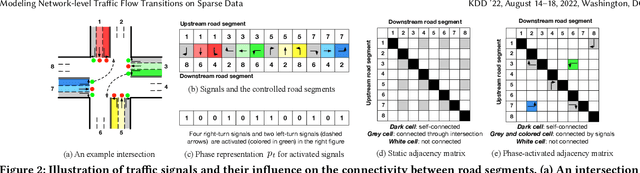
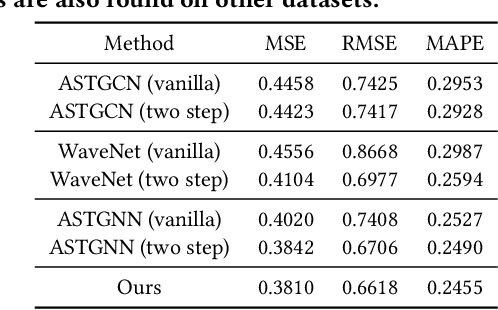
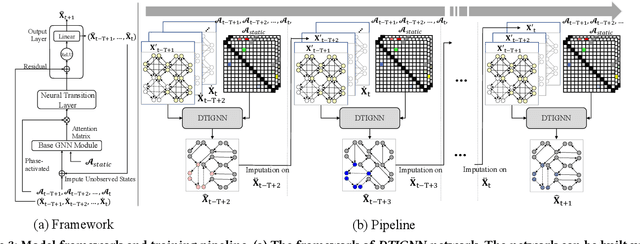
Modeling how network-level traffic flow changes in the urban environment is useful for decision-making in transportation, public safety and urban planning. The traffic flow system can be viewed as a dynamic process that transits between states (e.g., traffic volumes on each road segment) over time. In the real-world traffic system with traffic operation actions like traffic signal control or reversible lane changing, the system's state is influenced by both the historical states and the actions of traffic operations. In this paper, we consider the problem of modeling network-level traffic flow under a real-world setting, where the available data is sparse (i.e., only part of the traffic system is observed). We present DTIGNN, an approach that can predict network-level traffic flows from sparse data. DTIGNN models the traffic system as a dynamic graph influenced by traffic signals, learns the transition models grounded by fundamental transition equations from transportation, and predicts future traffic states with imputation in the process. Through comprehensive experiments, we demonstrate that our method outperforms state-of-the-art methods and can better support decision-making in transportation.