 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLibSignal: An Open Library for Traffic Signal Control
Nov 19, 2022This paper introduces a library for cross-simulator comparison of reinforcement learning models in traffic signal control tasks. This library is developed to implement recent state-of-the-art reinforcement learning models with extensible interfaces and unified cross-simulator evaluation metrics. It supports commonly-used simulators in traffic signal control tasks, including Simulation of Urban MObility(SUMO) and CityFlow, and multiple benchmark datasets for fair comparisons. We conducted experiments to validate our implementation of the models and to calibrate the simulators so that the experiments from one simulator could be referential to the other. Based on the validated models and calibrated environments, this paper compares and reports the performance of current state-of-the-art RL algorithms across different datasets and simulators. This is the first time that these methods have been compared fairly under the same datasets with different simulators.
Modeling Network-level Traffic Flow Transitions on Sparse Data
Aug 13, 2022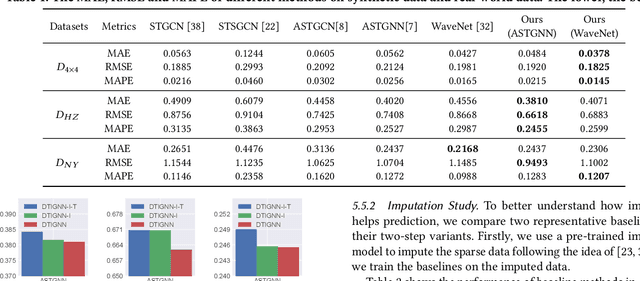
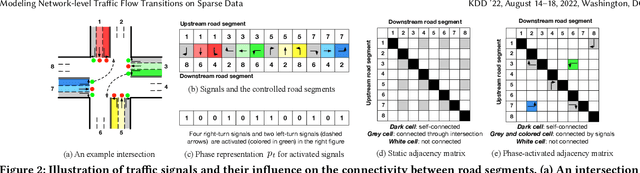
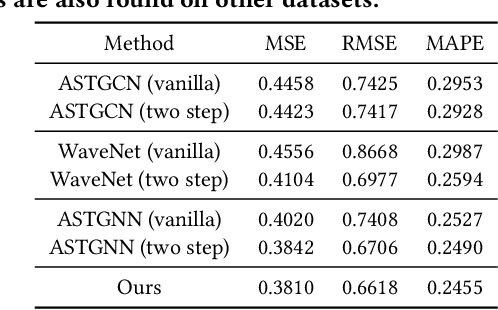
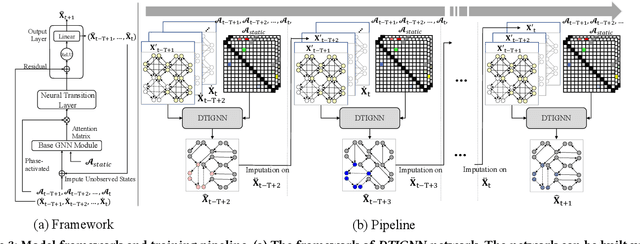
Modeling how network-level traffic flow changes in the urban environment is useful for decision-making in transportation, public safety and urban planning. The traffic flow system can be viewed as a dynamic process that transits between states (e.g., traffic volumes on each road segment) over time. In the real-world traffic system with traffic operation actions like traffic signal control or reversible lane changing, the system's state is influenced by both the historical states and the actions of traffic operations. In this paper, we consider the problem of modeling network-level traffic flow under a real-world setting, where the available data is sparse (i.e., only part of the traffic system is observed). We present DTIGNN, an approach that can predict network-level traffic flows from sparse data. DTIGNN models the traffic system as a dynamic graph influenced by traffic signals, learns the transition models grounded by fundamental transition equations from transportation, and predicts future traffic states with imputation in the process. Through comprehensive experiments, we demonstrate that our method outperforms state-of-the-art methods and can better support decision-making in transportation.