 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGSR: Learning Structured Reasoning for Embodied Manipulation
Feb 02, 2026Despite rapid progress, embodied agents still struggle with long-horizon manipulation that requires maintaining spatial consistency, causal dependencies, and goal constraints. A key limitation of existing approaches is that task reasoning is implicitly embedded in high-dimensional latent representations, making it challenging to separate task structure from perceptual variability. We introduce Grounded Scene-graph Reasoning (GSR), a structured reasoning paradigm that explicitly models world-state evolution as transitions over semantically grounded scene graphs. By reasoning step-wise over object states and spatial relations, rather than directly mapping perception to actions, GSR enables explicit reasoning about action preconditions, consequences, and goal satisfaction in a physically grounded space. To support learning such reasoning, we construct Manip-Cognition-1.6M, a large-scale dataset that jointly supervises world understanding, action planning, and goal interpretation. Extensive evaluations across RLBench, LIBERO, GSR-benchmark, and real-world robotic tasks show that GSR significantly improves zero-shot generalization and long-horizon task completion over prompting-based baselines. These results highlight explicit world-state representations as a key inductive bias for scalable embodied reasoning.
Developing Smart MAVs for Autonomous Inspection in GPS-denied Constructions
Aug 12, 2024Smart Micro Aerial Vehicles (MAVs) have transformed infrastructure inspection by enabling efficient, high-resolution monitoring at various stages of construction, including hard-to-reach areas. Traditional manual operation of drones in GPS-denied environments, such as industrial facilities and infrastructure, is labour-intensive, tedious and prone to error. This study presents an innovative framework for smart MAV inspections in such complex and GPS-denied indoor environments. The framework features a hierarchical perception and planning system that identifies regions of interest and optimises task paths. It also presents an advanced MAV system with enhanced localisation and motion planning capabilities, integrated with Neural Reconstruction technology for comprehensive 3D reconstruction of building structures. The effectiveness of the framework was empirically validated in a 4,000 square meters indoor infrastructure facility with an interior length of 80 metres, a width of 50 metres and a height of 7 metres. The main structure consists of columns and walls. Experimental results show that our MAV system performs exceptionally well in autonomous inspection tasks, achieving a 100\% success rate in generating and executing scan paths. Extensive experiments validate the manoeuvrability of our developed MAV, achieving a 100\% success rate in motion planning with a tracking error of less than 0.1 metres. In addition, the enhanced reconstruction method using 3D Gaussian Splatting technology enables the generation of high-fidelity rendering models from the acquired data. Overall, our novel method represents a significant advancement in the use of robotics for infrastructure inspection.
Accurate Cutting-point Estimation for Robotic Lychee Harvesting through Geometry-aware Learning
Mar 30, 2024Accurately identifying lychee-picking points in unstructured orchard environments and obtaining their coordinate locations is critical to the success of lychee-picking robots. However, traditional two-dimensional (2D) image-based object detection methods often struggle due to the complex geometric structures of branches, leaves and fruits, leading to incorrect determination of lychee picking points. In this study, we propose a Fcaf3d-lychee network model specifically designed for the accurate localisation of lychee picking points. Point cloud data of lychee picking points in natural environments are acquired using Microsoft's Azure Kinect DK time-of-flight (TOF) camera through multi-view stitching. We augment the Fully Convolutional Anchor-Free 3D Object Detection (Fcaf3d) model with a squeeze-and-excitation(SE) module, which exploits human visual attention mechanisms for improved feature extraction of lychee picking points. The trained network model is evaluated on a test set of lychee-picking locations and achieves an impressive F1 score of 88.57%, significantly outperforming existing models. Subsequent three-dimensional (3D) position detection of picking points in real lychee orchard environments yields high accuracy, even under varying degrees of occlusion. Localisation errors of lychee picking points are within 1.5 cm in all directions, demonstrating the robustness and generality of the model.
Exploring Accurate 3D Phenotyping in Greenhouse through Neural Radiance Fields
Mar 28, 2024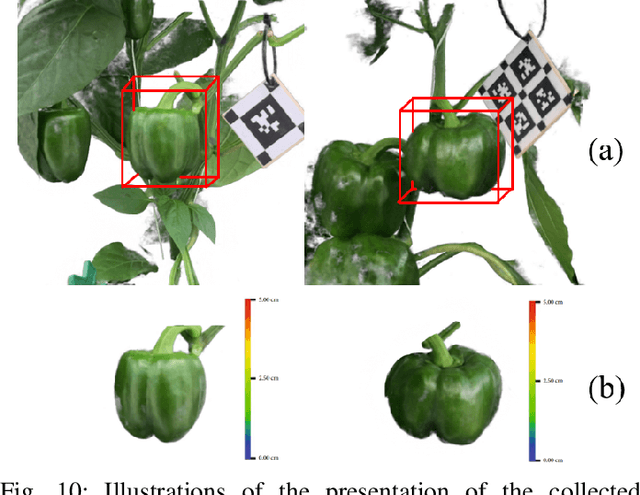
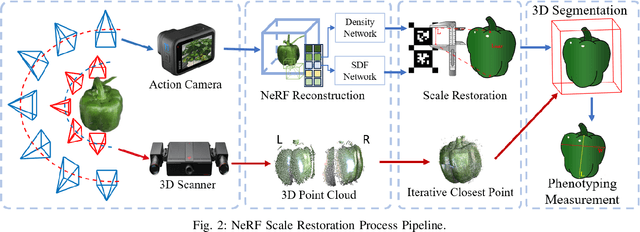
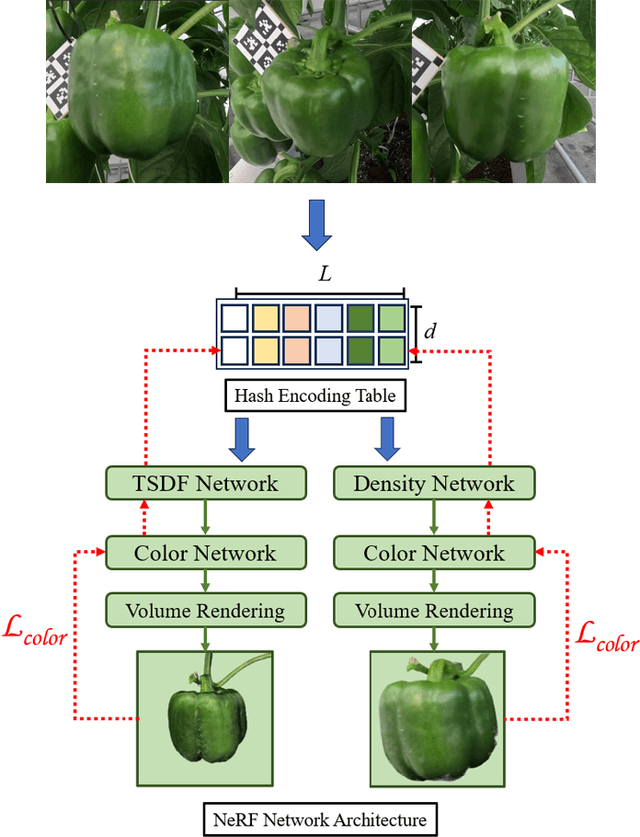

Accurate collection of plant phenotyping is critical to optimising sustainable farming practices in precision agriculture. Traditional phenotyping in controlled laboratory environments, while valuable, falls short in understanding plant growth under real-world conditions. Emerging sensor and digital technologies offer a promising approach for direct phenotyping of plants in farm environments. This study investigates a learning-based phenotyping method using the Neural Radiance Field to achieve accurate in-situ phenotyping of pepper plants in greenhouse environments. To quantitatively evaluate the performance of this method, traditional point cloud registration on 3D scanning data is implemented for comparison. Experimental result shows that NeRF(Neural Radiance Fields) achieves competitive accuracy compared to the 3D scanning methods. The mean distance error between the scanner-based method and the NeRF-based method is 0.865mm. This study shows that the learning-based NeRF method achieves similar accuracy to 3D scanning-based methods but with improved scalability and robustness.
Pheno-Robot: An Auto-Digital Modelling System for In-Situ Phenotyping in the Field
Feb 15, 2024



Accurate reconstruction of plant models for phenotyping analysis is critical for optimising sustainable agricultural practices in precision agriculture. Traditional laboratory-based phenotyping, while valuable, falls short of understanding how plants grow under uncontrolled conditions. Robotic technologies offer a promising avenue for large-scale, direct phenotyping in real-world environments. This study explores the deployment of emerging robotics and digital technology in plant phenotyping to improve performance and efficiency. Three critical functional modules: environmental understanding, robotic motion planning, and in-situ phenotyping, are introduced to automate the entire process. Experimental results demonstrate the effectiveness of the system in agricultural environments. The pheno-robot system autonomously collects high-quality data by navigating around plants. In addition, the in-situ modelling model reconstructs high-quality plant models from the data collected by the robot. The developed robotic system shows high efficiency and robustness, demonstrating its potential to advance plant science in real-world agricultural environments.
Developing Flying Explorer for Autonomous Digital Modelling in Wild Unknowns
Dec 29, 2023

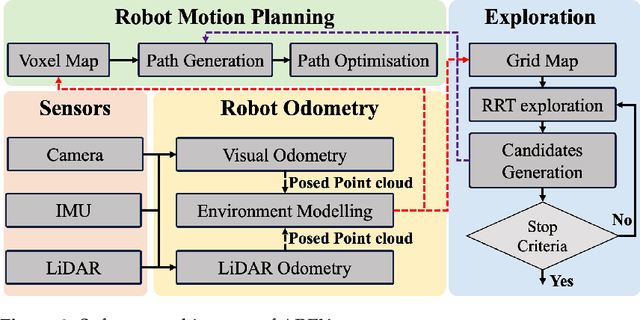

This work presents an innovative solution for robotic odometry, path planning and exploration in wild unknown environments, focusing on digital modelling. The approach uses a minimum cost formulation with pseudo-randomly generated objectives, integrating multi-path planning and evaluation, with emphasis on full coverage of unknown maps based on feasible boundaries of interest. The evaluation carried out on a robotic platform with a lightweight 3D LiDAR sensor model, assesses the consistency and efficiency in exploring completely unknown subterranean-like areas. The algorithm allows for dynamic changes to the desired target and behaviour. At the same time, the paper details the design of AREX, highlighting its robust localisation, mapping and efficient exploration target selection capabilities, with a focus on continuity in exploration direction for increased efficiency and reduced odometry errors. The real-time, high-precision environmental perception module is identified as critical for accurate obstacle avoidance and exploration boundary identification.
High-fidelity 3D Reconstruction of Plants using Neural Radiance Field
Nov 07, 2023



Accurate reconstruction of plant phenotypes plays a key role in optimising sustainable farming practices in the field of Precision Agriculture (PA). Currently, optical sensor-based approaches dominate the field, but the need for high-fidelity 3D reconstruction of crops and plants in unstructured agricultural environments remains challenging. Recently, a promising development has emerged in the form of Neural Radiance Field (NeRF), a novel method that utilises neural density fields. This technique has shown impressive performance in various novel vision synthesis tasks, but has remained relatively unexplored in the agricultural context. In our study, we focus on two fundamental tasks within plant phenotyping: (1) the synthesis of 2D novel-view images and (2) the 3D reconstruction of crop and plant models. We explore the world of neural radiance fields, in particular two SOTA methods: Instant-NGP, which excels in generating high-quality images with impressive training and inference speed, and Instant-NSR, which improves the reconstructed geometry by incorporating the Signed Distance Function (SDF) during training. In particular, we present a novel plant phenotype dataset comprising real plant images from production environments. This dataset is a first-of-its-kind initiative aimed at comprehensively exploring the advantages and limitations of NeRF in agricultural contexts. Our experimental results show that NeRF demonstrates commendable performance in the synthesis of novel-view images and is able to achieve reconstruction results that are competitive with Reality Capture, a leading commercial software for 3D Multi-View Stereo (MVS)-based reconstruction. However, our study also highlights certain drawbacks of NeRF, including relatively slow training speeds, performance limitations in cases of insufficient sampling, and challenges in obtaining geometry quality in complex setups.
A Novel Perception and Semantic Mapping Method for Robot Autonomy in Orchards
Sep 01, 2023


In this work, we propose a novel framework for achieving robotic autonomy in orchards. It consists of two key steps: perception and semantic mapping. In the perception step, we introduce a 3D detection method that accurately identifies objects directly on point cloud maps. In the semantic mapping step, we develop a mapping module that constructs a visibility graph map by incorporating object-level information and terrain analysis. By combining these two steps, our framework improves the autonomy of agricultural robots in orchard environments. The accurate detection of objects and the construction of a semantic map enable the robot to navigate autonomously, perform tasks such as fruit harvesting, and acquire actionable information for efficient agricultural production.
Semantic Segmentation of Fruits on Multi-sensor Fused Data in Natural Orchards
Aug 04, 2022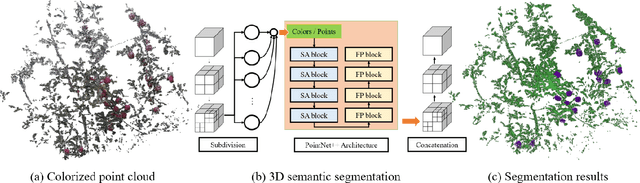
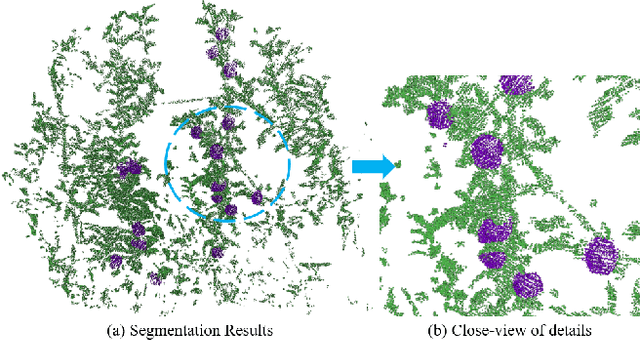
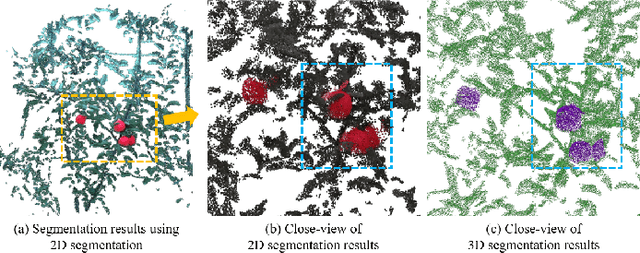
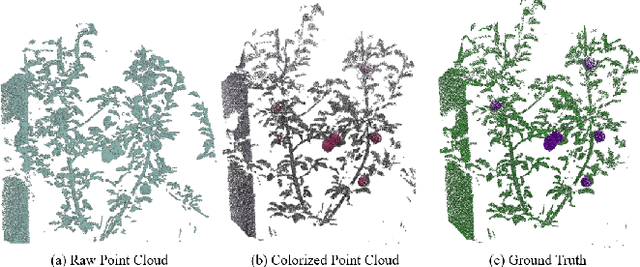
Semantic segmentation is a fundamental task for agricultural robots to understand the surrounding environments in natural orchards. The recent development of the LiDAR techniques enables the robot to acquire accurate range measurements of the view in the unstructured orchards. Compared to RGB images, 3D point clouds have geometrical properties. By combining the LiDAR and camera, rich information on geometries and textures can be obtained. In this work, we propose a deep-learning-based segmentation method to perform accurate semantic segmentation on fused data from a LiDAR-Camera visual sensor. Two critical problems are explored and solved in this work. The first one is how to efficiently fused the texture and geometrical features from multi-sensor data. The second one is how to efficiently train the 3D segmentation network under severely imbalance class conditions. Moreover, an implementation of 3D segmentation in orchards including LiDAR-Camera data fusion, data collection and labelling, network training, and model inference is introduced in detail. In the experiment, we comprehensively analyze the network setup when dealing with highly unstructured and noisy point clouds acquired from an apple orchard. Overall, our proposed method achieves 86.2% mIoU on the segmentation of fruits on the high-resolution point cloud (100k-200k points). The experiment results show that the proposed method can perform accurate segmentation in real orchard environments.
Accurate Fruit Localisation for Robotic Harvesting using High Resolution LiDAR-Camera Fusion
May 01, 2022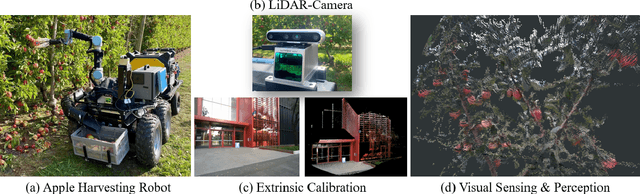
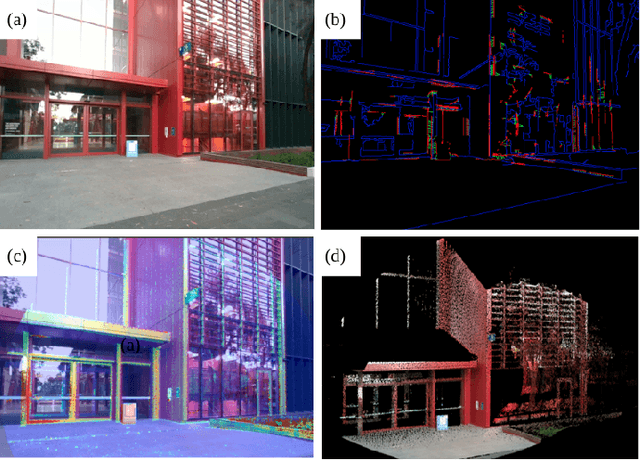


Accurate depth-sensing plays a crucial role in securing a high success rate of robotic harvesting in natural orchard environments. Solid-state LiDAR (SSL), a recently introduced LiDAR technique, can perceive high-resolution geometric information of the scenes, which can be potential utilised to receive accurate depth information. Meanwhile, the fusion of the sensory information from LiDAR and camera can significantly enhance the sensing ability of the harvesting robots. This work introduces a LiDAR-camera fusion-based visual sensing and perception strategy to perform accurate fruit localisation for a harvesting robot in the apple orchards. Two SOTA extrinsic calibration methods, target-based and targetless-based, are applied and evaluated to obtain the accurate extrinsic matrix between the LiDAR and camera. With the extrinsic calibration, the point clouds and color images are fused to perform fruit localisation using a one-stage instance segmentation network. Experimental shows that LiDAR-camera achieves better quality on visual sensing in the natural environments. Meanwhile, introducing the LiDAR-camera fusion largely improves the accuracy and robustness of the fruit localisation. Specifically, the standard deviations of fruit localisation by using LiDAR-camera at 0.5 m, 1.2 m, and 1.8 m are 0.245, 0.227, and 0.275 cm respectively. These measurement error is only one one fifth of that from Realsense D455. Lastly, we have attached our visualised point cloud to demonstrate the highly accurate sensing method.