 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGSR: Learning Structured Reasoning for Embodied Manipulation
Feb 02, 2026Despite rapid progress, embodied agents still struggle with long-horizon manipulation that requires maintaining spatial consistency, causal dependencies, and goal constraints. A key limitation of existing approaches is that task reasoning is implicitly embedded in high-dimensional latent representations, making it challenging to separate task structure from perceptual variability. We introduce Grounded Scene-graph Reasoning (GSR), a structured reasoning paradigm that explicitly models world-state evolution as transitions over semantically grounded scene graphs. By reasoning step-wise over object states and spatial relations, rather than directly mapping perception to actions, GSR enables explicit reasoning about action preconditions, consequences, and goal satisfaction in a physically grounded space. To support learning such reasoning, we construct Manip-Cognition-1.6M, a large-scale dataset that jointly supervises world understanding, action planning, and goal interpretation. Extensive evaluations across RLBench, LIBERO, GSR-benchmark, and real-world robotic tasks show that GSR significantly improves zero-shot generalization and long-horizon task completion over prompting-based baselines. These results highlight explicit world-state representations as a key inductive bias for scalable embodied reasoning.
Developing Smart MAVs for Autonomous Inspection in GPS-denied Constructions
Aug 12, 2024Smart Micro Aerial Vehicles (MAVs) have transformed infrastructure inspection by enabling efficient, high-resolution monitoring at various stages of construction, including hard-to-reach areas. Traditional manual operation of drones in GPS-denied environments, such as industrial facilities and infrastructure, is labour-intensive, tedious and prone to error. This study presents an innovative framework for smart MAV inspections in such complex and GPS-denied indoor environments. The framework features a hierarchical perception and planning system that identifies regions of interest and optimises task paths. It also presents an advanced MAV system with enhanced localisation and motion planning capabilities, integrated with Neural Reconstruction technology for comprehensive 3D reconstruction of building structures. The effectiveness of the framework was empirically validated in a 4,000 square meters indoor infrastructure facility with an interior length of 80 metres, a width of 50 metres and a height of 7 metres. The main structure consists of columns and walls. Experimental results show that our MAV system performs exceptionally well in autonomous inspection tasks, achieving a 100\% success rate in generating and executing scan paths. Extensive experiments validate the manoeuvrability of our developed MAV, achieving a 100\% success rate in motion planning with a tracking error of less than 0.1 metres. In addition, the enhanced reconstruction method using 3D Gaussian Splatting technology enables the generation of high-fidelity rendering models from the acquired data. Overall, our novel method represents a significant advancement in the use of robotics for infrastructure inspection.
Exploring Accurate 3D Phenotyping in Greenhouse through Neural Radiance Fields
Mar 28, 2024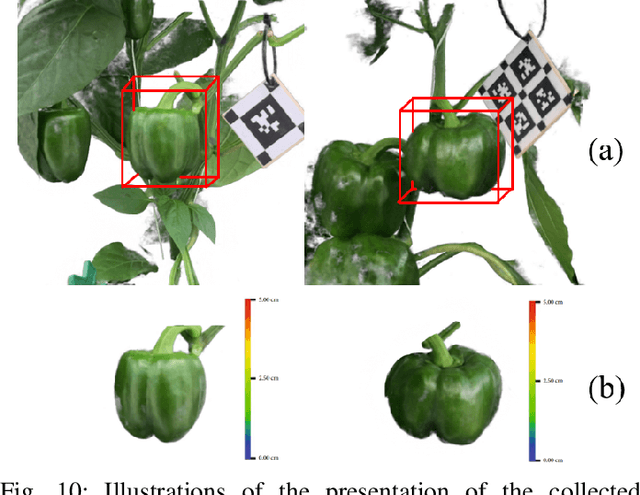
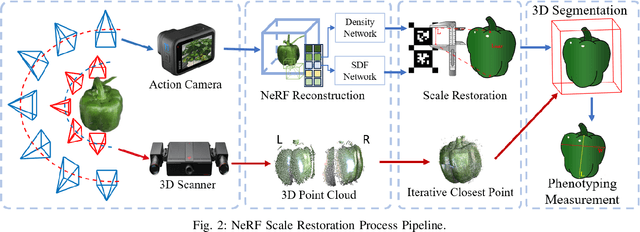
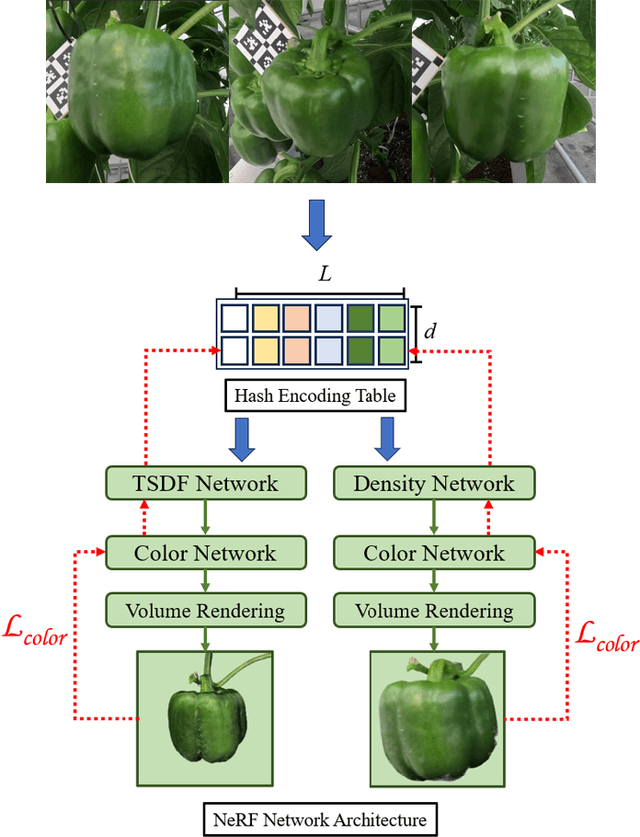

Accurate collection of plant phenotyping is critical to optimising sustainable farming practices in precision agriculture. Traditional phenotyping in controlled laboratory environments, while valuable, falls short in understanding plant growth under real-world conditions. Emerging sensor and digital technologies offer a promising approach for direct phenotyping of plants in farm environments. This study investigates a learning-based phenotyping method using the Neural Radiance Field to achieve accurate in-situ phenotyping of pepper plants in greenhouse environments. To quantitatively evaluate the performance of this method, traditional point cloud registration on 3D scanning data is implemented for comparison. Experimental result shows that NeRF(Neural Radiance Fields) achieves competitive accuracy compared to the 3D scanning methods. The mean distance error between the scanner-based method and the NeRF-based method is 0.865mm. This study shows that the learning-based NeRF method achieves similar accuracy to 3D scanning-based methods but with improved scalability and robustness.