 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Learned Image Compression without Entropy Coding
May 22, 2026Entropy coding is widely used in typical learned image compression (LIC) that converts latents into a compact bitstream. However, entropy coding is typically sequential and becomes the coding latency bottleneck. To overcome it, we present Entropy-Coding Free Learned Image Compression (EF-LIC), a multi-rate framework that generates compact representation by removing statistical and correlation redundancy with low coding latency. First, we introduce unconstrained vector quantization and prove that its index distribution approaches the maximum-entropy bound, yielding minimal statistical redundancy. Second, we propose a context-conditioned autoregressive transform that directly reparameterizes the latents to reduce inter-dependency. Theoretical analysis shows that EF-LIC can remove correlation redundancy as effectively as typical LIC with entropy coding, leading to comparable compression performance. Experiments show EF-LIC achieves up to 67.86% bitrate reduction over MS-ILLM on Kodak with LPIPS. Ablation studies further show EF-LIC matches the compression performance of its entropy-coding based variant while achieving over $3\times$ faster encoding and $5\times$ faster decoding.
ProGIC: Progressive and Lightweight Generative Image Compression with Residual Vector Quantization
Mar 03, 2026Recent advances in generative image compression (GIC) have delivered remarkable improvements in perceptual quality. However, many GICs rely on large-scale and rigid models, which severely constrain their utility for flexible transmission and practical deployment in low-bitrate scenarios. To address these issues, we propose Progressive Generative Image Compression (ProGIC), a compact codec built on residual vector quantization (RVQ). In RVQ, a sequence of vector quantizers encodes the residuals stage by stage, each with its own codebook. The resulting codewords sum to a coarse-to-fine reconstruction and a progressive bitstream, enabling previews from partial data. We pair this with a lightweight backbone based on depthwise-separable convolutions and small attention blocks, enabling practical deployment on both GPUs and CPU-only devices. Experimental results show that ProGIC attains comparable compression performance compared with previous methods. It achieves bitrate savings of up to 57.57% on DISTS and 58.83% on LPIPS compared to MS-ILLM on the Kodak dataset. Beyond perceptual quality, ProGIC enables progressive transmission for flexibility, and also delivers over 10 times faster encoding and decoding compared with MS-ILLM on GPUs for efficiency.
Accurate Cutting-point Estimation for Robotic Lychee Harvesting through Geometry-aware Learning
Mar 30, 2024Accurately identifying lychee-picking points in unstructured orchard environments and obtaining their coordinate locations is critical to the success of lychee-picking robots. However, traditional two-dimensional (2D) image-based object detection methods often struggle due to the complex geometric structures of branches, leaves and fruits, leading to incorrect determination of lychee picking points. In this study, we propose a Fcaf3d-lychee network model specifically designed for the accurate localisation of lychee picking points. Point cloud data of lychee picking points in natural environments are acquired using Microsoft's Azure Kinect DK time-of-flight (TOF) camera through multi-view stitching. We augment the Fully Convolutional Anchor-Free 3D Object Detection (Fcaf3d) model with a squeeze-and-excitation(SE) module, which exploits human visual attention mechanisms for improved feature extraction of lychee picking points. The trained network model is evaluated on a test set of lychee-picking locations and achieves an impressive F1 score of 88.57%, significantly outperforming existing models. Subsequent three-dimensional (3D) position detection of picking points in real lychee orchard environments yields high accuracy, even under varying degrees of occlusion. Localisation errors of lychee picking points are within 1.5 cm in all directions, demonstrating the robustness and generality of the model.
A Novel Perception and Semantic Mapping Method for Robot Autonomy in Orchards
Sep 01, 2023


In this work, we propose a novel framework for achieving robotic autonomy in orchards. It consists of two key steps: perception and semantic mapping. In the perception step, we introduce a 3D detection method that accurately identifies objects directly on point cloud maps. In the semantic mapping step, we develop a mapping module that constructs a visibility graph map by incorporating object-level information and terrain analysis. By combining these two steps, our framework improves the autonomy of agricultural robots in orchard environments. The accurate detection of objects and the construction of a semantic map enable the robot to navigate autonomously, perform tasks such as fruit harvesting, and acquire actionable information for efficient agricultural production.
An SBR Based Ray Tracing Channel Modeling Method for THz and Massive MIMO Communications
Aug 22, 2022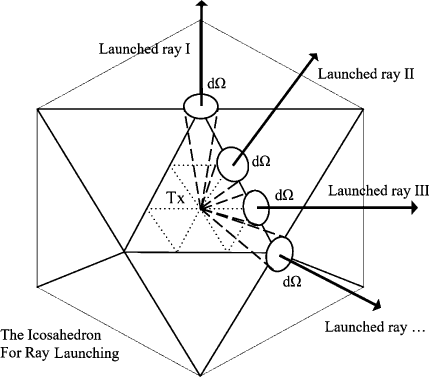
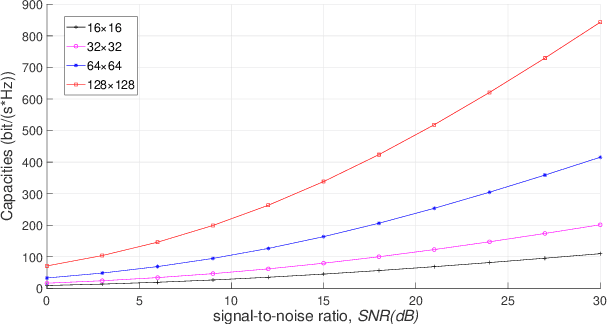
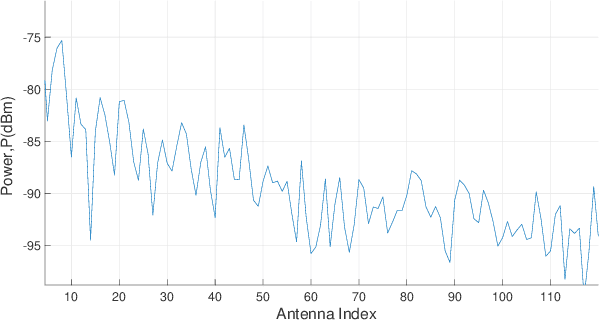
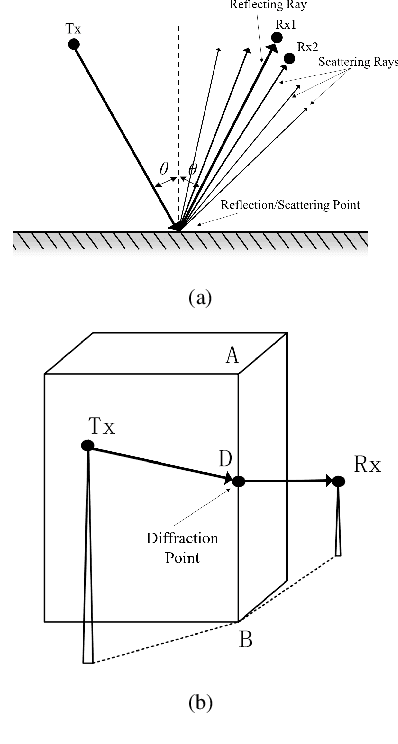
Terahertz (THz) communication and the application of massive multiple-input multiple-output (MIMO) technology have been proved significant for the sixth generation (6G) communication systems, and have gained global interests. In this paper, we employ the shooting and bouncing ray (SBR) method integrated with acceleration technology to model THz and massive MIMO channel. The results of ray tracing (RT) simulation in this paper, i.e., angle of departure (AoD), angle of arrival (AoA), and power delay profile (PDP) under the frequency band supported by the commercial RT software Wireless Insite (WI) are in agreement with those produced by WI. Based on the Kirchhoff scattering effect on material surfaces and atmospheric absorption loss showing at THz frequency band, the modified propagation models of Fresnel reflection coefficients and free-space attenuation are consistent with the measured results. For massive MIMO, the channel capacity and the stochastic power distribution are analyzed. The results indicate the applicability of SBR method for building deterministic models of THz and massive MIMO channels with extensive functions and acceptable accuracy.