 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete Diffusion for Complex and Congested Multi-Agent Path Finding with Sparse Social Attention
May 13, 2026Multi-Agent Path Finding (MAPF) is a coordination problem that requires computing globally consistent, collision-free trajectories from individual start positions to assigned goal positions under combinatorial planning complexity. In dense environments, suboptimal initial plans induce compound conflicts that hinder feasible repair. For repair-based solvers like LNS2, initial plan quality critically affects downstream repair, yet this factor remains underexplored. We propose DiffLNS, a hybrid framework that integrates a discrete denoising diffusion probabilistic model (D3PM) with LNS2. The D3PM serves as an initializer with sparse social attention that learns a spatiotemporal prior over coordinated multi-agent action trajectories from expert demonstrations and samples multiple joint plans. Operating directly on the categorical action space, our discrete diffusion preserves the MAPF action structure and samples from a multimodal joint-plan distribution to produce diverse drafts well suited for neighborhood repair. These drafts act as warm starts for downstream repair, which completes unfinished trajectories and resolves remaining conflicts under hard MAPF constraints. Experimental results show that despite being trained only on instances with at most 96 agents, the initializer generalizes to scenarios with up to 312 agents at inference time. Across 20 complex and congested settings, DiffLNS achieves an average success rate of 95.8%, outperforming the strongest tested baseline by 9.6 percentage points and matching or exceeding all baselines in all 20 settings. To the best of our knowledge, this is the first work to leverage discrete diffusion for warm-starting an LNS-based MAPF solver.
Low-Complexity Cooperative Payload Transportation for Nonholonomic Mobile Robots Under Scalable Constraints
Feb 19, 2025
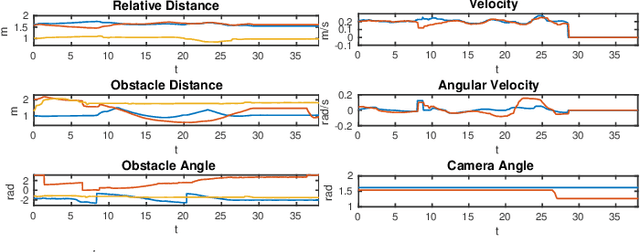
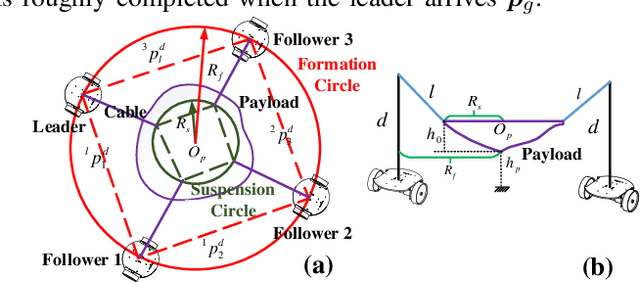

Cooperative transportation, a key aspect of logistics cyber-physical systems (CPS), is typically approached using dis tributed control and optimization-based methods. The distributed control methods consume less time, but poorly handle and extend to multiple constraints. Instead, optimization-based methods handle constraints effectively, but they are usually centralized, time-consuming and thus not easily scalable to numerous robots. To overcome drawbacks of both, we propose a novel cooperative transportation method for nonholonomic mobile robots by im proving conventional formation control, which is distributed, has a low time-complexity and accommodates scalable constraints. The proposed control-based method is testified on a cable suspended payload and divided into two parts, including robot trajectory generation and trajectory tracking. Unlike most time consuming trajectory generation methods, ours can generate trajectories with only constant time-complexity, needless of global maps. As for trajectory tracking, our control-based method not only scales easily to multiple constraints as those optimization based methods, but reduces their time-complexity from poly nomial to linear. Simulations and experiments can verify the feasibility of our method.
Total Uncertainty Quantification in Inverse PDE Solutions Obtained with Reduced-Order Deep Learning Surrogate Models
Aug 20, 2024We propose an approximate Bayesian method for quantifying the total uncertainty in inverse PDE solutions obtained with machine learning surrogate models, including operator learning models. The proposed method accounts for uncertainty in the observations and PDE and surrogate models. First, we use the surrogate model to formulate a minimization problem in the reduced space for the maximum a posteriori (MAP) inverse solution. Then, we randomize the MAP objective function and obtain samples of the posterior distribution by minimizing different realizations of the objective function. We test the proposed framework by comparing it with the iterative ensemble smoother and deep ensembling methods for a non-linear diffusion equation with an unknown space-dependent diffusion coefficient. Among other problems, this equation describes groundwater flow in an unconfined aquifer. Depending on the training dataset and ensemble sizes, the proposed method provides similar or more descriptive posteriors of the parameters and states than the iterative ensemble smoother method. Deep ensembling underestimates uncertainty and provides less informative posteriors than the other two methods.
NTU4DRadLM: 4D Radar-centric Multi-Modal Dataset for Localization and Mapping
Sep 02, 2023



Simultaneous Localization and Mapping (SLAM) is moving towards a robust perception age. However, LiDAR- and visual- SLAM may easily fail in adverse conditions (rain, snow, smoke and fog, etc.). In comparison, SLAM based on 4D Radar, thermal camera and IMU can work robustly. But only a few literature can be found. A major reason is the lack of related datasets, which seriously hinders the research. Even though some datasets are proposed based on 4D radar in past four years, they are mainly designed for object detection, rather than SLAM. Furthermore, they normally do not include thermal camera. Therefore, in this paper, NTU4DRadLM is presented to meet this requirement. The main characteristics are: 1) It is the only dataset that simultaneously includes all 6 sensors: 4D radar, thermal camera, IMU, 3D LiDAR, visual camera and RTK GPS. 2) Specifically designed for SLAM tasks, which provides fine-tuned ground truth odometry and intentionally formulated loop closures. 3) Considered both low-speed robot platform and fast-speed unmanned vehicle platform. 4) Covered structured, unstructured and semi-structured environments. 5) Considered both middle- and large- scale outdoor environments, i.e., the 6 trajectories range from 246m to 6.95km. 6) Comprehensively evaluated three types of SLAM algorithms. Totally, the dataset is around 17.6km, 85mins, 50GB and it will be accessible from this link: https://github.com/junzhang2016/NTU4DRadLM
An SBR Based Ray Tracing Channel Modeling Method for THz and Massive MIMO Communications
Aug 22, 2022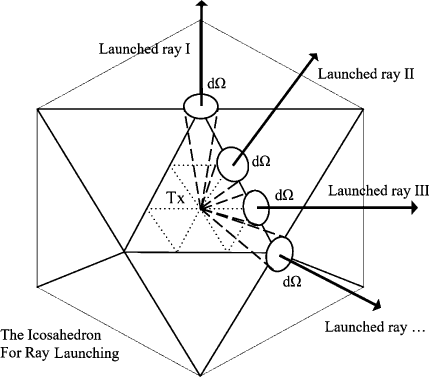
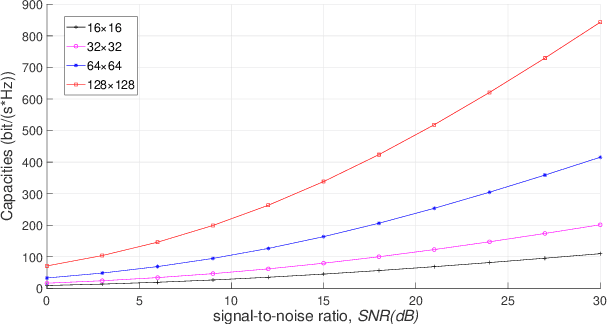
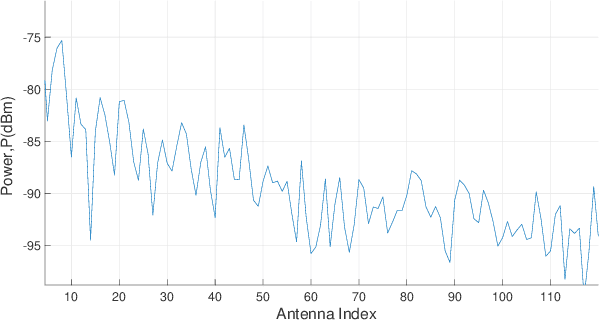
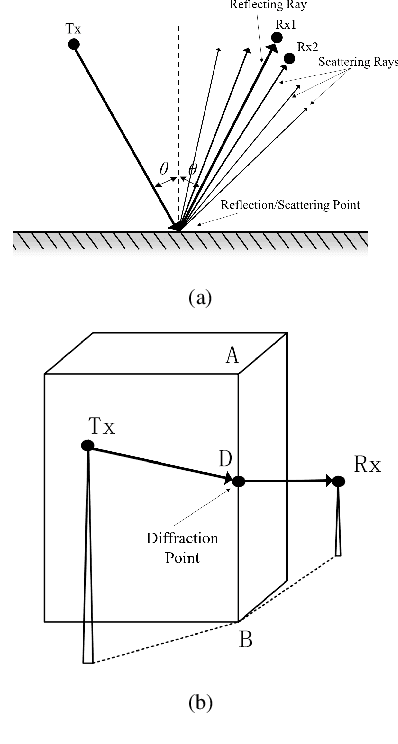
Terahertz (THz) communication and the application of massive multiple-input multiple-output (MIMO) technology have been proved significant for the sixth generation (6G) communication systems, and have gained global interests. In this paper, we employ the shooting and bouncing ray (SBR) method integrated with acceleration technology to model THz and massive MIMO channel. The results of ray tracing (RT) simulation in this paper, i.e., angle of departure (AoD), angle of arrival (AoA), and power delay profile (PDP) under the frequency band supported by the commercial RT software Wireless Insite (WI) are in agreement with those produced by WI. Based on the Kirchhoff scattering effect on material surfaces and atmospheric absorption loss showing at THz frequency band, the modified propagation models of Fresnel reflection coefficients and free-space attenuation are consistent with the measured results. For massive MIMO, the channel capacity and the stochastic power distribution are analyzed. The results indicate the applicability of SBR method for building deterministic models of THz and massive MIMO channels with extensive functions and acceptable accuracy.