 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNTU4DRadLM: 4D Radar-centric Multi-Modal Dataset for Localization and Mapping
Sep 02, 2023



Simultaneous Localization and Mapping (SLAM) is moving towards a robust perception age. However, LiDAR- and visual- SLAM may easily fail in adverse conditions (rain, snow, smoke and fog, etc.). In comparison, SLAM based on 4D Radar, thermal camera and IMU can work robustly. But only a few literature can be found. A major reason is the lack of related datasets, which seriously hinders the research. Even though some datasets are proposed based on 4D radar in past four years, they are mainly designed for object detection, rather than SLAM. Furthermore, they normally do not include thermal camera. Therefore, in this paper, NTU4DRadLM is presented to meet this requirement. The main characteristics are: 1) It is the only dataset that simultaneously includes all 6 sensors: 4D radar, thermal camera, IMU, 3D LiDAR, visual camera and RTK GPS. 2) Specifically designed for SLAM tasks, which provides fine-tuned ground truth odometry and intentionally formulated loop closures. 3) Considered both low-speed robot platform and fast-speed unmanned vehicle platform. 4) Covered structured, unstructured and semi-structured environments. 5) Considered both middle- and large- scale outdoor environments, i.e., the 6 trajectories range from 246m to 6.95km. 6) Comprehensively evaluated three types of SLAM algorithms. Totally, the dataset is around 17.6km, 85mins, 50GB and it will be accessible from this link: https://github.com/junzhang2016/NTU4DRadLM
Semantic Reinforced Attention Learning for Visual Place Recognition
Aug 19, 2021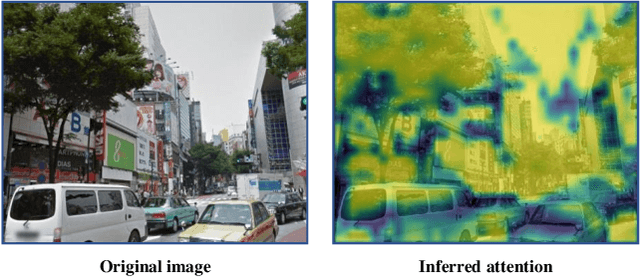
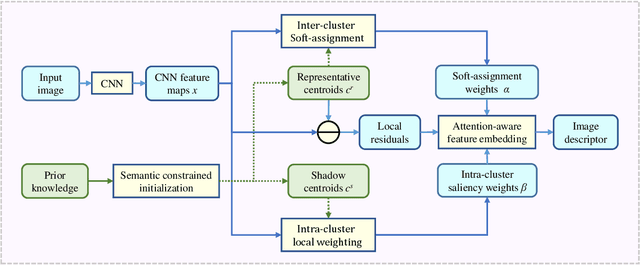
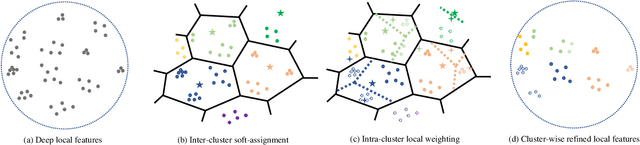
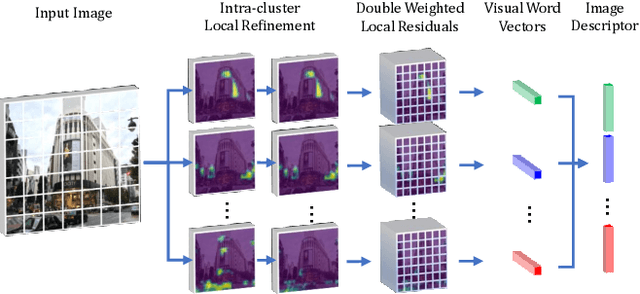
Large-scale visual place recognition (VPR) is inherently challenging because not all visual cues in the image are beneficial to the task. In order to highlight the task-relevant visual cues in the feature embedding, the existing attention mechanisms are either based on artificial rules or trained in a thorough data-driven manner. To fill the gap between the two types, we propose a novel Semantic Reinforced Attention Learning Network (SRALNet), in which the inferred attention can benefit from both semantic priors and data-driven fine-tuning. The contribution lies in two-folds. (1) To suppress misleading local features, an interpretable local weighting scheme is proposed based on hierarchical feature distribution. (2) By exploiting the interpretability of the local weighting scheme, a semantic constrained initialization is proposed so that the local attention can be reinforced by semantic priors. Experiments demonstrate that our method outperforms state-of-the-art techniques on city-scale VPR benchmark datasets.
Conditional Gaussian Distribution Learning for Open Set Recognition
Apr 17, 2020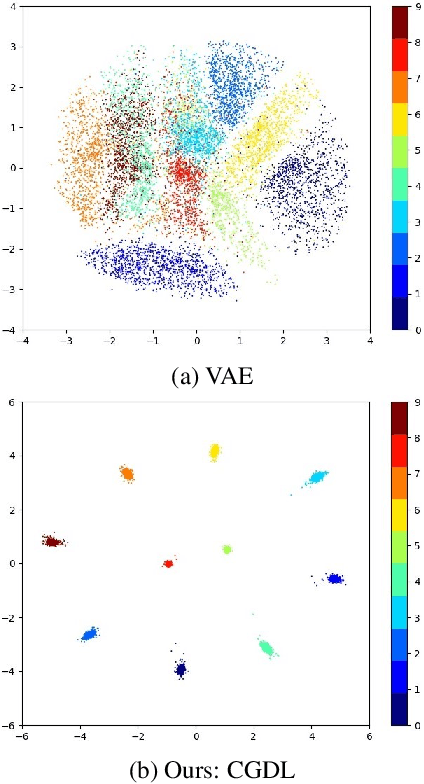
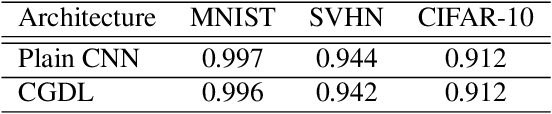
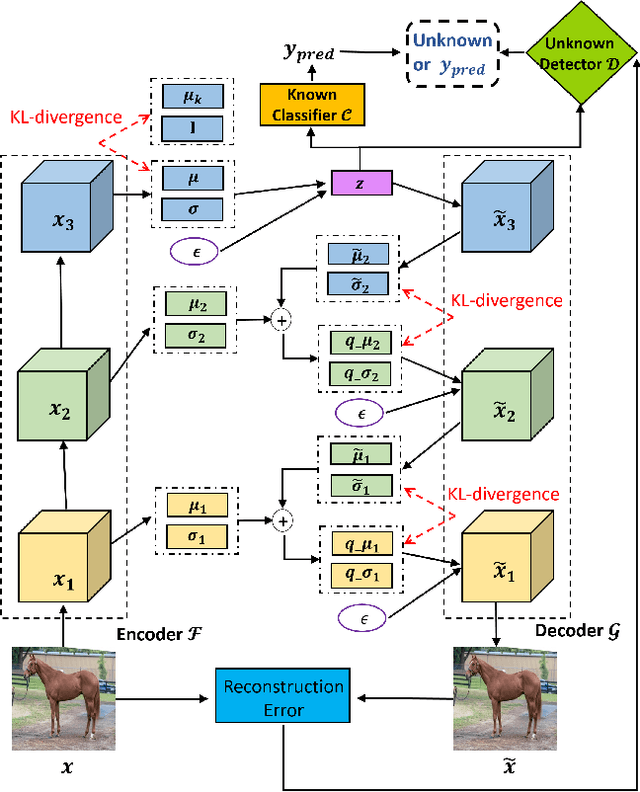

Deep neural networks have achieved state-of-the-art performance in a wide range of recognition/classification tasks. However, when applying deep learning to real-world applications, there are still multiple challenges. A typical challenge is that unknown samples may be fed into the system during the testing phase and traditional deep neural networks will wrongly recognize the unknown sample as one of the known classes. Open set recognition is a potential solution to overcome this problem, where the open set classifier should have the ability to reject unknown samples as well as maintain high classification accuracy on known classes. The variational auto-encoder (VAE) is a popular model to detect unknowns, but it cannot provide discriminative representations for known classification. In this paper, we propose a novel method, Conditional Gaussian Distribution Learning (CGDL), for open set recognition. In addition to detecting unknown samples, this method can also classify known samples by forcing different latent features to approximate different Gaussian models. Meanwhile, to avoid information hidden in the input vanishing in the middle layers, we also adopt the probabilistic ladder architecture to extract high-level abstract features. Experiments on several standard image datasets reveal that the proposed method significantly outperforms the baseline method and achieves new state-of-the-art results.
Magnetic-Assisted Initialization for Infrastructure-free Mobile Robot Localization
Nov 21, 2019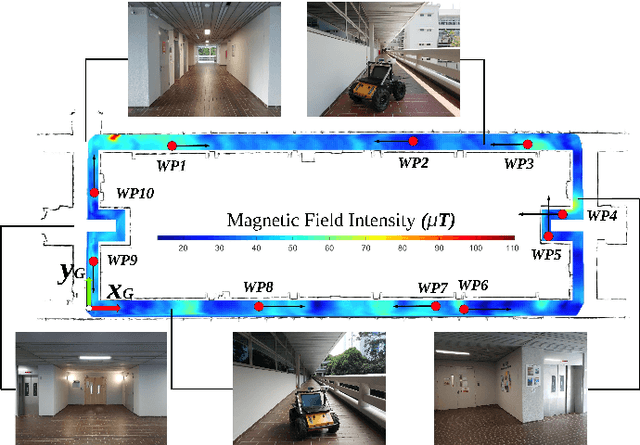
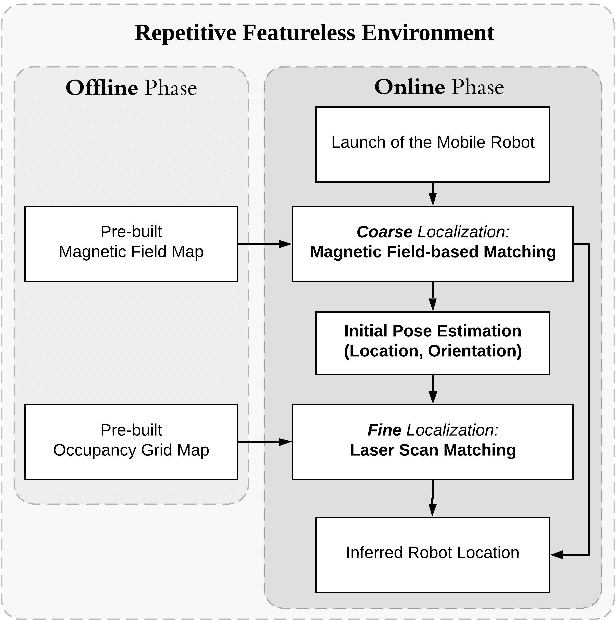

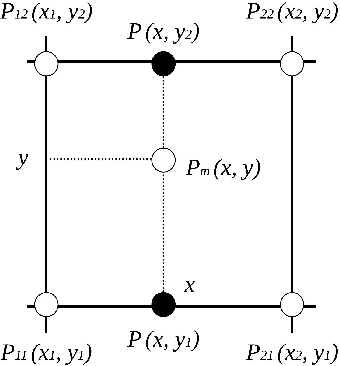
Most of the existing mobile robot localization solutions are either heavily dependent on pre-installed infrastructures or having difficulty working in highly repetitive environments which do not have sufficient unique features. To address this problem, we propose a magnetic-assisted initialization approach that enhances the performance of infrastructure-free mobile robot localization in repetitive featureless environments. The proposed system adopts a coarse-to-fine structure, which mainly consists of two parts: magnetic field-based matching and laser scan matching. Firstly, the interpolated magnetic field map is built and the initial pose of the mobile robot is partly determined by the k-Nearest Neighbors (k-NN) algorithm. Next, with the fusion of prior initial pose information, the robot is localized by laser scan matching more accurately and efficiently. In our experiment, the mobile robot was successfully localized in a featureless rectangular corridor with a success rate of 88% and an average correct localization time of 6.6 seconds.