 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInternal Structure Attention Network for Fingerprint Presentation Attack Detection from Optical Coherence Tomography
Mar 20, 2023



As a non-invasive optical imaging technique, optical coherence tomography (OCT) has proven promising for automatic fingerprint recognition system (AFRS) applications. Diverse approaches have been proposed for OCT-based fingerprint presentation attack detection (PAD). However, considering the complexity and variety of PA samples, it is extremely challenging to increase the generalization ability with the limited PA dataset. To solve the challenge, this paper presents a novel supervised learning-based PAD method, denoted as ISAPAD, which applies prior knowledge to guide network training and enhance the generalization ability. The proposed dual-branch architecture can not only learns global features from the OCT image, but also concentrate on layered structure feature which comes from the internal structure attention module (ISAM). The simple yet effective ISAM enables the proposed network to obtain layered segmentation features belonging only to Bonafide from noisy OCT volume data directly. Combined with effective training strategies and PAD score generation rules, ISAPAD obtains optimal PAD performance in limited training data. Domain generalization experiments and visualization analysis validate the effectiveness of the proposed method for OCT PAD.
Searching Collaborative Agents for Multi-plane Localization in 3D Ultrasound
May 22, 2021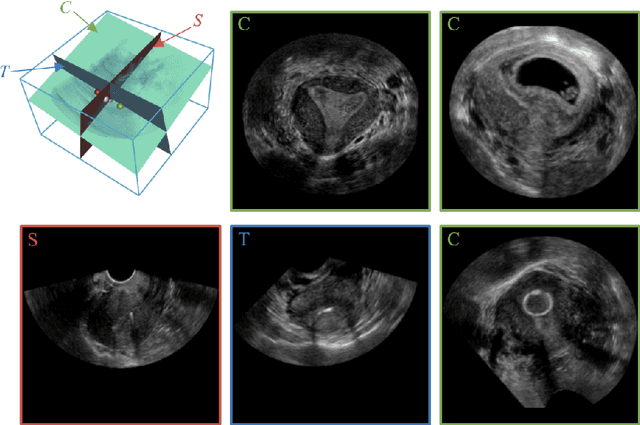
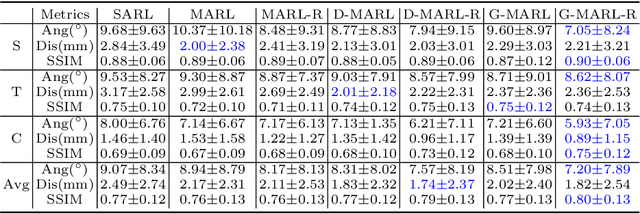
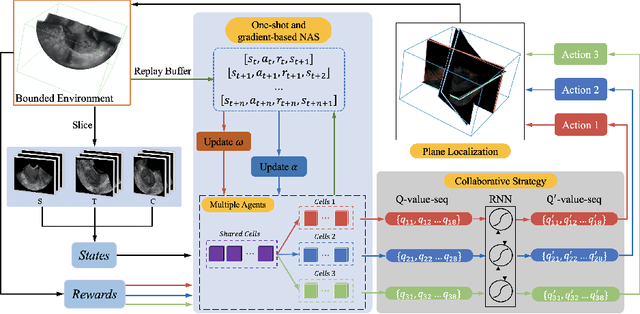

3D ultrasound (US) has become prevalent due to its rich spatial and diagnostic information not contained in 2D US. Moreover, 3D US can contain multiple standard planes (SPs) in one shot. Thus, automatically localizing SPs in 3D US has the potential to improve user-independence and scanning-efficiency. However, manual SP localization in 3D US is challenging because of the low image quality, huge search space and large anatomical variability. In this work, we propose a novel multi-agent reinforcement learning (MARL) framework to simultaneously localize multiple SPs in 3D US. Our contribution is four-fold. First, our proposed method is general and it can accurately localize multiple SPs in different challenging US datasets. Second, we equip the MARL system with a recurrent neural network (RNN) based collaborative module, which can strengthen the communication among agents and learn the spatial relationship among planes effectively. Third, we explore to adopt the neural architecture search (NAS) to automatically design the network architecture of both the agents and the collaborative module. Last, we believe we are the first to realize automatic SP localization in pelvic US volumes, and note that our approach can handle both normal and abnormal uterus cases. Extensively validated on two challenging datasets of the uterus and fetal brain, our proposed method achieves the average localization accuracy of 7.03 degrees/1.59mm and 9.75 degrees/1.19mm. Experimental results show that our light-weight MARL model has higher accuracy than state-of-the-art methods.
DynaComm: Accelerating Distributed CNN Training between Edges and Clouds through Dynamic Communication Scheduling
Jan 20, 2021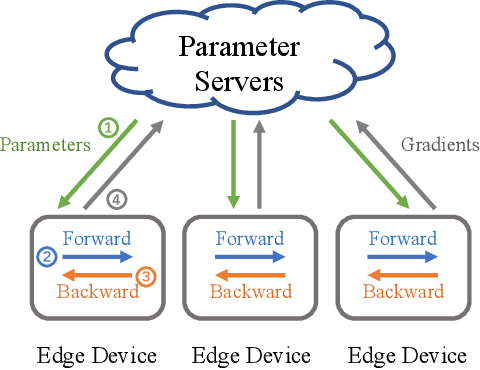
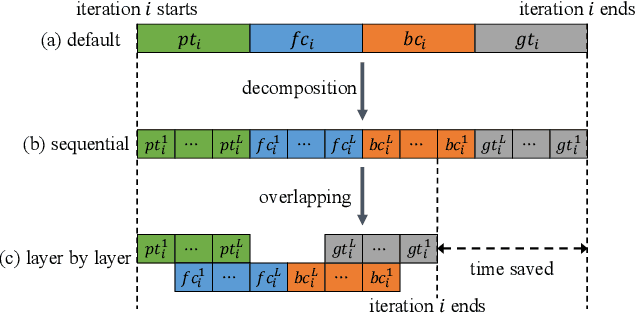
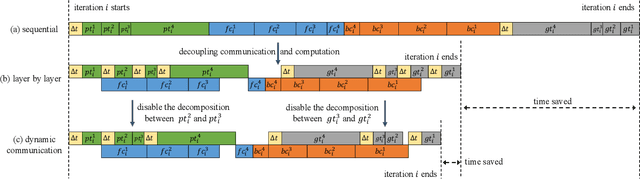
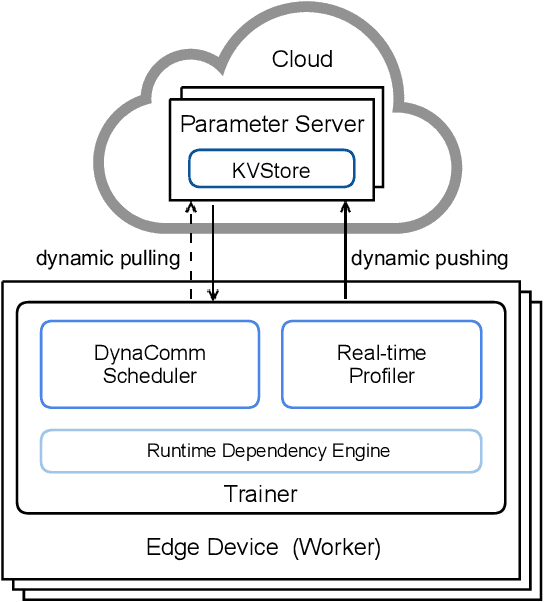
To reduce uploading bandwidth and address privacy concerns, deep learning at the network edge has been an emerging topic. Typically, edge devices collaboratively train a shared model using real-time generated data through the Parameter Server framework. Although all the edge devices can share the computing workloads, the distributed training processes over edge networks are still time-consuming due to the parameters and gradients transmission procedures between parameter servers and edge devices. Focusing on accelerating distributed Convolutional Neural Networks (CNNs) training at the network edge, we present DynaComm, a novel scheduler that dynamically decomposes each transmission procedure into several segments to achieve optimal communications and computations overlapping during run-time. Through experiments, we verify that DynaComm manages to achieve optimal scheduling for all cases compared to competing strategies while the model accuracy remains untouched.