 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Cross-domain Graph Learning: Progress and Future Directions
Mar 14, 2025
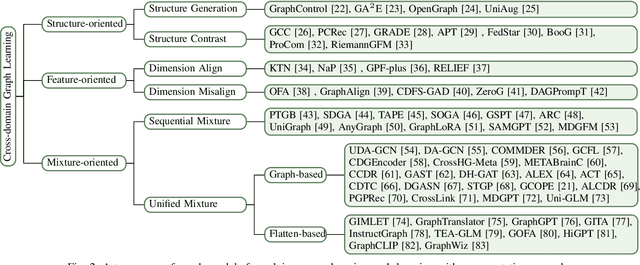


Graph learning plays a vital role in mining and analyzing complex relationships involved in graph data, which is widely used in many real-world applications like transaction networks and communication networks. Foundation models in CV and NLP have shown powerful cross-domain capabilities that are also significant in graph domains. However, existing graph learning approaches struggle with cross-domain tasks. Inspired by successes in CV and NLP, cross-domain graph learning has once again become a focal point of attention to realizing true graph foundation models. In this survey, we present a comprehensive review and analysis of existing works on cross-domain graph learning. Concretely, we first propose a new taxonomy, categorizing existing approaches based on the learned cross-domain information: structure, feature, and structure-feature mixture. Next, we systematically survey representative methods in these categories. Finally, we discuss the remaining limitations of existing studies and highlight promising avenues for future research. Relevant papers are summarized and will be consistently updated at: https://github.com/cshhzhao/Awesome-Cross-Domain-Graph-Learning.
ProG: A Graph Prompt Learning Benchmark
Jun 08, 2024

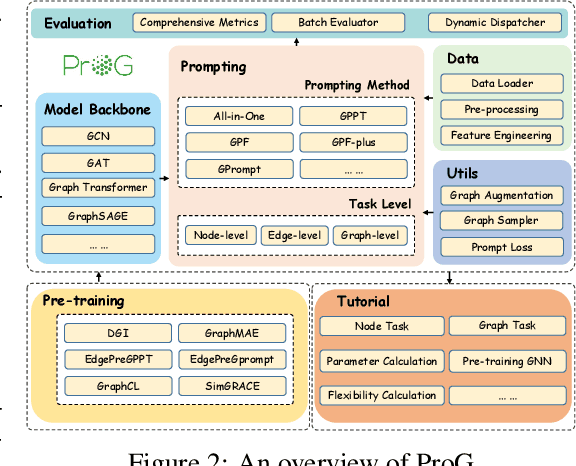

Artificial general intelligence on graphs has shown significant advancements across various applications, yet the traditional 'Pre-train & Fine-tune' paradigm faces inefficiencies and negative transfer issues, particularly in complex and few-shot settings. Graph prompt learning emerges as a promising alternative, leveraging lightweight prompts to manipulate data and fill the task gap by reformulating downstream tasks to the pretext. However, several critical challenges still remain: how to unify diverse graph prompt models, how to evaluate the quality of graph prompts, and to improve their usability for practical comparisons and selection. In response to these challenges, we introduce the first comprehensive benchmark for graph prompt learning. Our benchmark integrates SIX pre-training methods and FIVE state-of-the-art graph prompt techniques, evaluated across FIFTEEN diverse datasets to assess performance, flexibility, and efficiency. We also present 'ProG', an easy-to-use open-source library that streamlines the execution of various graph prompt models, facilitating objective evaluations. Additionally, we propose a unified framework that categorizes existing graph prompt methods into two main approaches: prompts as graphs and prompts as tokens. This framework enhances the applicability and comparison of graph prompt techniques. The code is available at: https://github.com/sheldonresearch/ProG.
All in One and One for All: A Simple yet Effective Method towards Cross-domain Graph Pretraining
Feb 15, 2024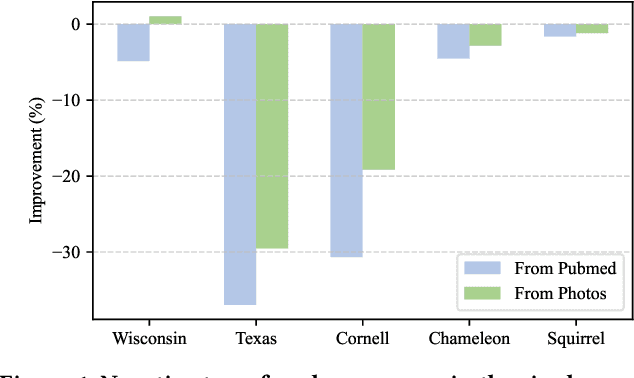

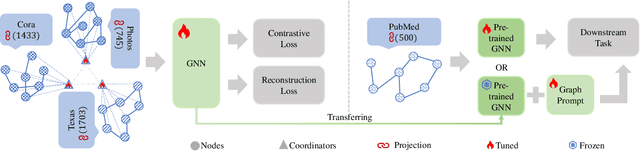

Large Language Models (LLMs) have revolutionized the fields of computer vision (CV) and natural language processing (NLP). One of the most notable advancements of LLMs is that a single model is trained on vast and diverse datasets spanning multiple domains -- a paradigm we term `All in One'. This methodology empowers LLMs with super generalization capabilities, facilitating an encompassing comprehension of varied data distributions. Leveraging these capabilities, a single LLM demonstrates remarkable versatility across a variety of domains -- a paradigm we term `One for All'. However, applying this idea to the graph field remains a formidable challenge, with cross-domain pretraining often resulting in negative transfer. This issue is particularly important in few-shot learning scenarios, where the paucity of training data necessitates the incorporation of external knowledge sources. In response to this challenge, we propose a novel approach called Graph COordinators for PrEtraining (GCOPE), that harnesses the underlying commonalities across diverse graph datasets to enhance few-shot learning. Our novel methodology involves a unification framework that amalgamates disparate graph datasets during the pretraining phase to distill and transfer meaningful knowledge to target tasks. Extensive experiments across multiple graph datasets demonstrate the superior efficacy of our approach. By successfully leveraging the synergistic potential of multiple graph datasets for pretraining, our work stands as a pioneering contribution to the realm of graph foundational model.
Weakly Supervised Anomaly Detection via Knowledge-Data Alignment
Feb 06, 2024Anomaly detection (AD) plays a pivotal role in numerous web-based applications, including malware detection, anti-money laundering, device failure detection, and network fault analysis. Most methods, which rely on unsupervised learning, are hard to reach satisfactory detection accuracy due to the lack of labels. Weakly Supervised Anomaly Detection (WSAD) has been introduced with a limited number of labeled anomaly samples to enhance model performance. Nevertheless, it is still challenging for models, trained on an inadequate amount of labeled data, to generalize to unseen anomalies. In this paper, we introduce a novel framework Knowledge-Data Alignment (KDAlign) to integrate rule knowledge, typically summarized by human experts, to supplement the limited labeled data. Specifically, we transpose these rules into the knowledge space and subsequently recast the incorporation of knowledge as the alignment of knowledge and data. To facilitate this alignment, we employ the Optimal Transport (OT) technique. We then incorporate the OT distance as an additional loss term to the original objective function of WSAD methodologies. Comprehensive experimental results on five real-world datasets demonstrate that our proposed KDAlign framework markedly surpasses its state-of-the-art counterparts, achieving superior performance across various anomaly types.
Physics-Inspired Neural Graph ODE for Long-term Dynamical Simulation
Aug 25, 2023Simulating and modeling the long-term dynamics of multi-object physical systems is an essential and challenging task. Current studies model the physical systems utilizing Graph Neural Networks (GNNs) with equivariant properties. Specifically, they model the dynamics as a sequence of discrete states with a fixed time interval and learn a direct mapping for all the two adjacent states. However, this direct mapping overlooks the continuous nature between the two states. Namely, we have verified that there are countless possible trajectories between two discrete dynamic states in current GNN-based direct mapping models. This issue greatly hinders the model generalization ability, leading to poor performance of the long-term simulation. In this paper, to better model the latent trajectory through discrete supervision signals, we propose a Physics-Inspired Neural Graph ODE (PINGO) algorithm. In PINGO, to ensure the uniqueness of the trajectory, we construct a Physics-Inspired Neural ODE framework to update the latent trajectory. Meanwhile, to effectively capture intricate interactions among objects, we use a GNN-based model to parameterize Neural ODE in a plug-and-play manner. Furthermore, we prove that the discrepancy between the learned trajectory of PIGNO and the true trajectory can be theoretically bounded. Extensive experiments verify our theoretical findings and demonstrate that our model yields an order-of-magnitude improvement over the state-of-the-art baselines, especially on long-term predictions and roll-out errors.