 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperiorGAT: Graph Attention Networks for Sparse LiDAR Point Cloud Reconstruction in Autonomous Systems
Dec 30, 2025LiDAR-based perception in autonomous systems is constrained by fixed vertical beam resolution and further compromised by beam dropout resulting from environmental occlusions. This paper introduces SuperiorGAT, a graph attention-based framework designed to reconstruct missing elevation information in sparse LiDAR point clouds. By modeling LiDAR scans as beam-aware graphs and incorporating gated residual fusion with feed-forward refinement, SuperiorGAT enables accurate reconstruction without increasing network depth. To evaluate performance, structured beam dropout is simulated by removing every fourth vertical scanning beam. Extensive experiments across diverse KITTI environments, including Person, Road, Campus, and City sequences, demonstrate that SuperiorGAT consistently achieves lower reconstruction error and improved geometric consistency compared to PointNet-based models and deeper GAT baselines. Qualitative X-Z projections further confirm the model's ability to preserve structural integrity with minimal vertical distortion. These results suggest that architectural refinement offers a computationally efficient method for improving LiDAR resolution without requiring additional sensor hardware.
Quantum Computing Supported Adversarial Attack-Resilient Autonomous Vehicle Perception Module for Traffic Sign Classification
Apr 17, 2025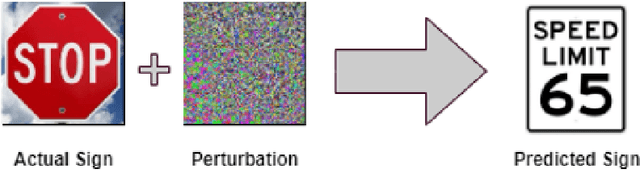
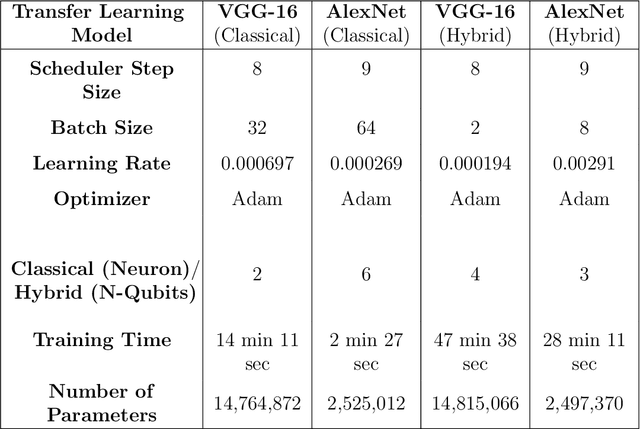
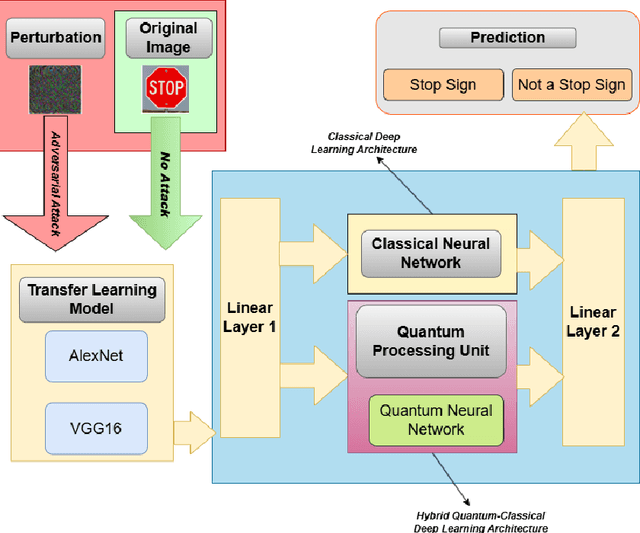
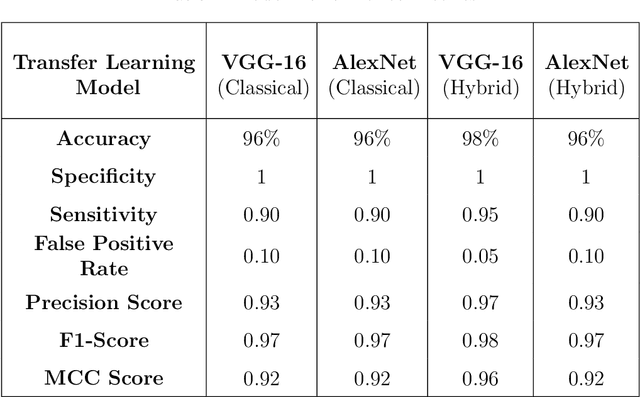
Deep learning (DL)-based image classification models are essential for autonomous vehicle (AV) perception modules since incorrect categorization might have severe repercussions. Adversarial attacks are widely studied cyberattacks that can lead DL models to predict inaccurate output, such as incorrectly classified traffic signs by the perception module of an autonomous vehicle. In this study, we create and compare hybrid classical-quantum deep learning (HCQ-DL) models with classical deep learning (C-DL) models to demonstrate robustness against adversarial attacks for perception modules. Before feeding them into the quantum system, we used transfer learning models, alexnet and vgg-16, as feature extractors. We tested over 1000 quantum circuits in our HCQ-DL models for projected gradient descent (PGD), fast gradient sign attack (FGSA), and gradient attack (GA), which are three well-known untargeted adversarial approaches. We evaluated the performance of all models during adversarial attacks and no-attack scenarios. Our HCQ-DL models maintain accuracy above 95\% during a no-attack scenario and above 91\% for GA and FGSA attacks, which is higher than C-DL models. During the PGD attack, our alexnet-based HCQ-DL model maintained an accuracy of 85\% compared to C-DL models that achieved accuracies below 21\%. Our results highlight that the HCQ-DL models provide improved accuracy for traffic sign classification under adversarial settings compared to their classical counterparts.
Analyzing Factors Influencing Driver Willingness to Accept Advanced Driver Assistance Systems
Feb 23, 2025Advanced Driver Assistance Systems (ADAS) enhance highway safety by improving environmental perception and reducing human errors. However, misconceptions, trust issues, and knowledge gaps hinder widespread adoption. This study examines driver perceptions, knowledge sources, and usage patterns of ADAS in passenger vehicles. A nationwide survey collected data from a diverse sample of U.S. drivers. Machine learning models predicted ADAS adoption, with SHAP (SHapley Additive Explanations) identifying key influencing factors. Findings indicate that higher trust levels correlate with increased ADAS usage, while concerns about reliability remain a barrier. Specific features, such as Forward Collision Warning and Driver Monitoring Systems, significantly influence adoption likelihood. Demographic factors (age, gender) and driving habits (experience, frequency) also shape ADAS acceptance. Findings emphasize the influence of socioeconomic, demographic, and behavioral factors on ADAS adoption, offering guidance for automakers, policymakers, and safety advocates to improve awareness, trust, and usability.
A Multi-Scale Isolation Forest Approach for Real-Time Detection and Filtering of FGSM Adversarial Attacks in Video Streams of Autonomous Vehicles
Feb 22, 2025



Deep Neural Networks (DNNs) have demonstrated remarkable success across a wide range of tasks, particularly in fields such as image classification. However, DNNs are highly susceptible to adversarial attacks, where subtle perturbations are introduced to input images, leading to erroneous model outputs. In today's digital era, ensuring the security and integrity of images processed by DNNs is of critical importance. One of the most prominent adversarial attack methods is the Fast Gradient Sign Method (FGSM), which perturbs images in the direction of the loss gradient to deceive the model. This paper presents a novel approach for detecting and filtering FGSM adversarial attacks in image processing tasks. Our proposed method evaluates 10,000 images, each subjected to five different levels of perturbation, characterized by $\epsilon$ values of 0.01, 0.02, 0.05, 0.1, and 0.2. These perturbations are applied in the direction of the loss gradient. We demonstrate that our approach effectively filters adversarially perturbed images, mitigating the impact of FGSM attacks. The method is implemented in Python, and the source code is publicly available on GitHub for reproducibility and further research.
A Systematic Evaluation of Generative Models on Tabular Transportation Data
Feb 13, 2025The sharing of large-scale transportation data is beneficial for transportation planning and policymaking. However, it also raises significant security and privacy concerns, as the data may include identifiable personal information, such as individuals' home locations. To address these concerns, synthetic data generation based on real transportation data offers a promising solution that allows privacy protection while potentially preserving data utility. Although there are various synthetic data generation techniques, they are often not tailored to the unique characteristics of transportation data, such as the inherent structure of transportation networks formed by all trips in the datasets. In this paper, we use New York City taxi data as a case study to conduct a systematic evaluation of the performance of widely used tabular data generative models. In addition to traditional metrics such as distribution similarity, coverage, and privacy preservation, we propose a novel graph-based metric tailored specifically for transportation data. This metric evaluates the similarity between real and synthetic transportation networks, providing potentially deeper insights into their structural and functional alignment. We also introduced an improved privacy metric to address the limitations of the commonly-used one. Our experimental results reveal that existing tabular data generative models often fail to perform as consistently as claimed in the literature, particularly when applied to transportation data use cases. Furthermore, our novel graph metric reveals a significant gap between synthetic and real data. This work underscores the potential need to develop generative models specifically tailored to take advantage of the unique characteristics of emerging domains, such as transportation.
A Robust Adversarial Ensemble with Causal (Feature Interaction) Interpretations for Image Classification
Dec 28, 2024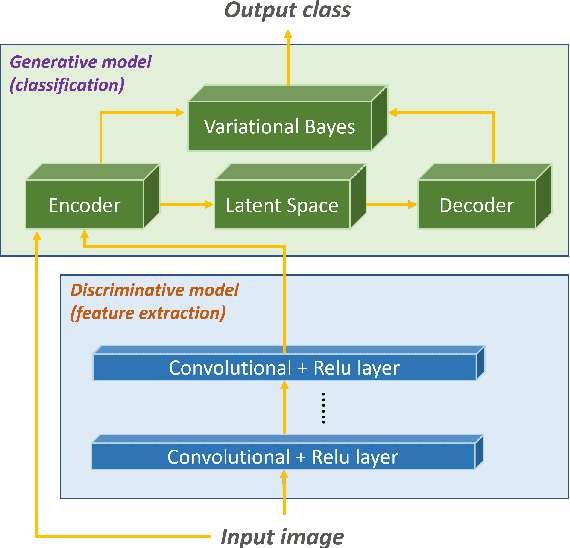
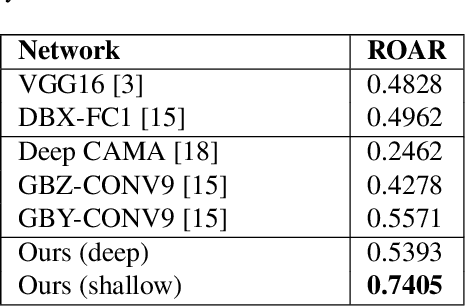
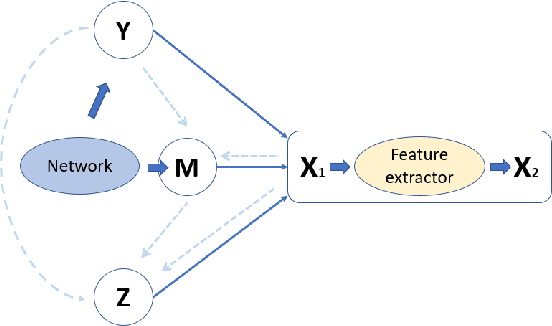
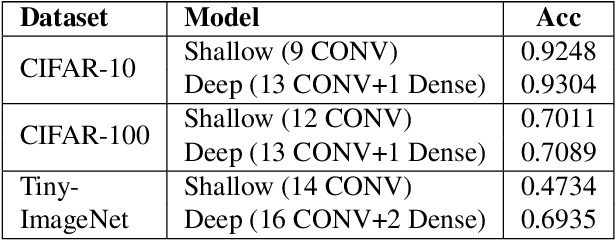
Deep learning-based discriminative classifiers, despite their remarkable success, remain vulnerable to adversarial examples that can mislead model predictions. While adversarial training can enhance robustness, it fails to address the intrinsic vulnerability stemming from the opaque nature of these black-box models. We present a deep ensemble model that combines discriminative features with generative models to achieve both high accuracy and adversarial robustness. Our approach integrates a bottom-level pre-trained discriminative network for feature extraction with a top-level generative classification network that models adversarial input distributions through a deep latent variable model. Using variational Bayes, our model achieves superior robustness against white-box adversarial attacks without adversarial training. Extensive experiments on CIFAR-10 and CIFAR-100 demonstrate our model's superior adversarial robustness. Through evaluations using counterfactual metrics and feature interaction-based metrics, we establish correlations between model interpretability and adversarial robustness. Additionally, preliminary results on Tiny-ImageNet validate our approach's scalability to more complex datasets, offering a practical solution for developing robust image classification models.
Quantum Adversarial Machine Learning and Defense Strategies: Challenges and Opportunities
Dec 16, 2024



As quantum computing continues to advance, the development of quantum-secure neural networks is crucial to prevent adversarial attacks. This paper proposes three quantum-secure design principles: (1) using post-quantum cryptography, (2) employing quantum-resistant neural network architectures, and (3) ensuring transparent and accountable development and deployment. These principles are supported by various quantum strategies, including quantum data anonymization, quantum-resistant neural networks, and quantum encryption. The paper also identifies open issues in quantum security, privacy, and trust, and recommends exploring adaptive adversarial attacks and auto adversarial attacks as future directions. The proposed design principles and recommendations provide guidance for developing quantum-secure neural networks, ensuring the integrity and reliability of machine learning models in the quantum era.
Graph-Powered Defense: Controller Area Network Intrusion Detection for Unmanned Aerial Vehicles
Dec 03, 2024



The network of services, including delivery, farming, and environmental monitoring, has experienced exponential expansion in the past decade with Unmanned Aerial Vehicles (UAVs). Yet, UAVs are not robust enough against cyberattacks, especially on the Controller Area Network (CAN) bus. The CAN bus is a general-purpose vehicle-bus standard to enable microcontrollers and in-vehicle computers to interact, primarily connecting different Electronic Control Units (ECUs). In this study, we focus on solving some of the most critical security weaknesses in UAVs by developing a novel graph-based intrusion detection system (IDS) leveraging the Uncomplicated Application-level Vehicular Communication and Networking (UAVCAN) protocol. First, we decode CAN messages based on UAVCAN protocol specification; second, we present a comprehensive method of transforming tabular UAVCAN messages into graph structures. Lastly, we apply various graph-based machine learning models for detecting cyber-attacks on the CAN bus, including graph convolutional neural networks (GCNNs), graph attention networks (GATs), Graph Sample and Aggregate Networks (GraphSAGE), and graph structure-based transformers. Our findings show that inductive models such as GATs, GraphSAGE, and graph-based transformers can achieve competitive and even better accuracy than transductive models like GCNNs in detecting various types of intrusions, with minimum information on protocol specification, thus providing a generic robust solution for CAN bus security for the UAVs. We also compared our results with baseline single-layer Long Short-Term Memory (LSTM) and found that all our graph-based models perform better without using any decoded features based on the UAVCAN protocol, highlighting higher detection performance with protocol-independent capability.
Crash Severity Risk Modeling Strategies under Data Imbalance
Dec 03, 2024



This study investigates crash severity risk modeling strategies for work zones involving large vehicles (i.e., trucks, buses, and vans) when there are crash data imbalance between low-severity (LS) and high-severity (HS) crashes. We utilized crash data, involving large vehicles in South Carolina work zones for the period between 2014 and 2018, which included 4 times more LS crashes compared to HS crashes. The objective of this study is to explore crash severity prediction performance of various models under different feature selection and data balancing techniques. The findings of this study highlight a disparity between LS and HS predictions, with less-accurate prediction of HS crashes compared to LS crashes due to class imbalance and feature overlaps between LS and HS crashes. Combining features from multiple feature selection techniques: statistical correlation, feature importance, recursive elimination, statistical tests, and mutual information, slightly improves HS crash prediction performance. Data balancing techniques such as NearMiss-1 and RandomUnderSampler, maximize HS recall when paired with certain prediction models, such as Bayesian Mixed Logit (BML), NeuralNet, and RandomForest, making them suitable for HS crash prediction. Conversely, RandomOverSampler, HS Class Weighting, and Kernel-based Synthetic Minority Oversampling (K-SMOTE), used with certain prediction models such as BML, CatBoost, and LightGBM, achieve a balanced performance, defined as achieving an equitable trade-off between LS and HS prediction performance metrics. These insights provide safety analysts with guidance to select models, feature selection techniques, and data balancing techniques that align with their specific safety objectives, offering a robust foundation for enhancing work-zone crash severity prediction.
An AutoML-based approach for Network Intrusion Detection
Nov 24, 2024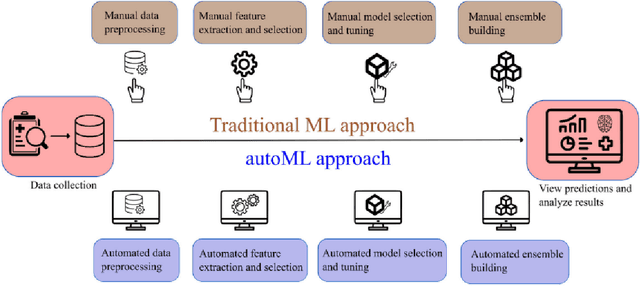
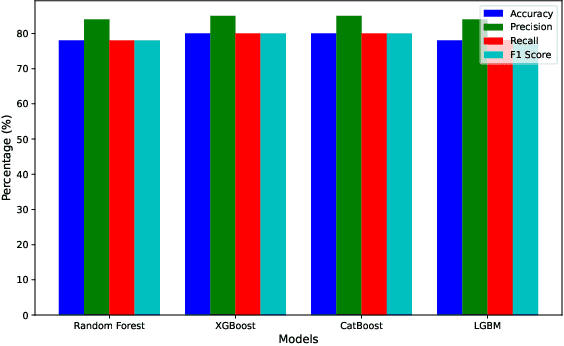
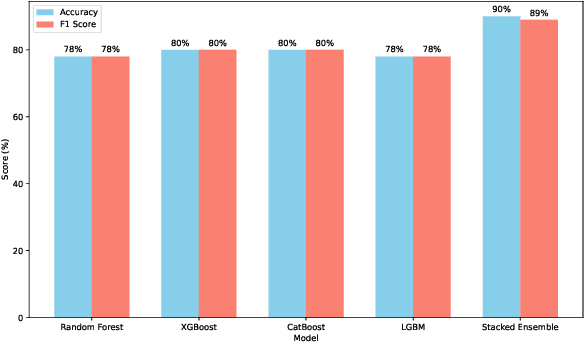

In this paper, we present an automated machine learning (AutoML) approach for network intrusion detection, leveraging a stacked ensemble model developed using the MLJAR AutoML framework. Our methodology combines multiple machine learning algorithms, including LightGBM, CatBoost, and XGBoost, to enhance detection accuracy and robustness. By automating model selection, feature engineering, and hyperparameter tuning, our approach reduces the manual overhead typically associated with traditional machine learning methods. Extensive experimentation on the NSL-KDD dataset demonstrates that the stacked ensemble model outperforms individual models, achieving high accuracy and minimizing false positives. Our findings underscore the benefits of using AutoML for network intrusion detection, as the AutoML-driven stacked ensemble achieved the highest performance with 90\% accuracy and an 89\% F1 score, outperforming individual models like Random Forest (78\% accuracy, 78\% F1 score), XGBoost and CatBoost (both 80\% accuracy, 80\% F1 score), and LightGBM (78\% accuracy, 78\% F1 score), providing a more adaptable and efficient solution for network security applications.