 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Computing Supported Adversarial Attack-Resilient Autonomous Vehicle Perception Module for Traffic Sign Classification
Apr 17, 2025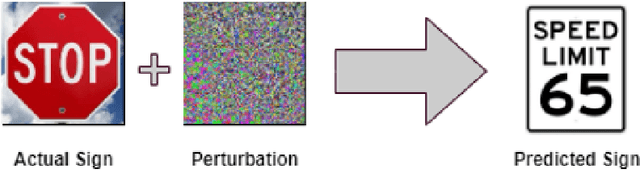
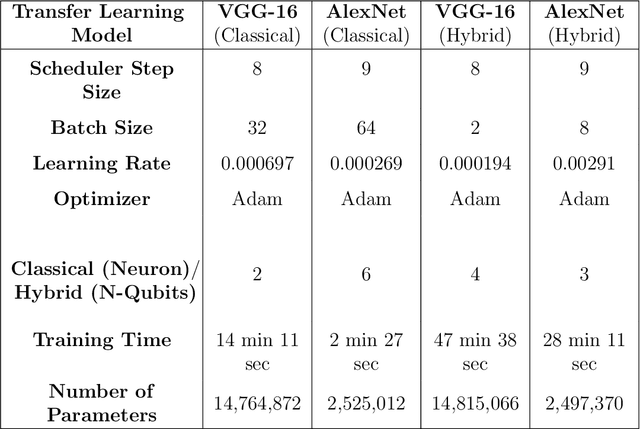
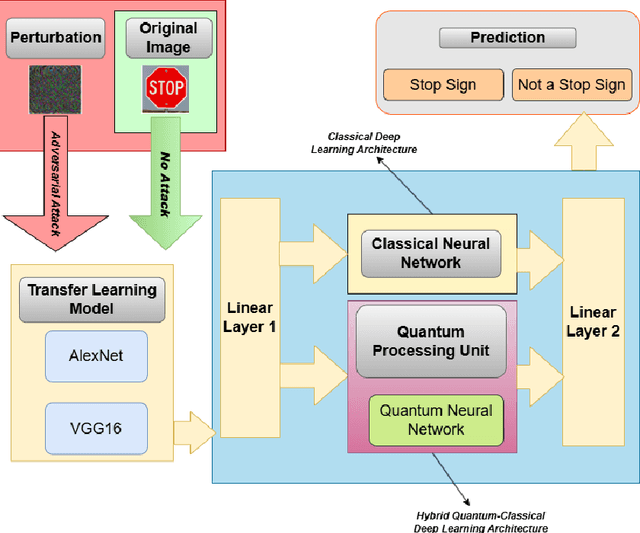
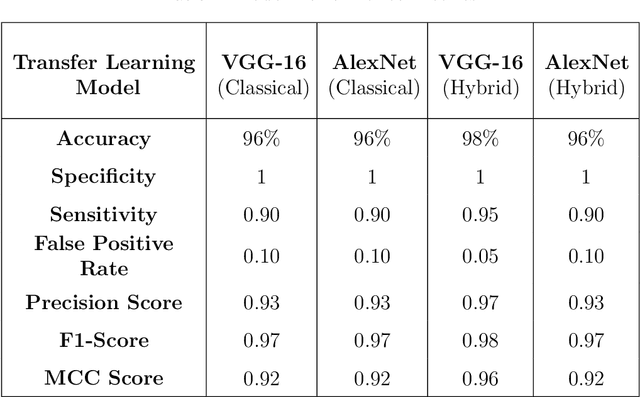
Deep learning (DL)-based image classification models are essential for autonomous vehicle (AV) perception modules since incorrect categorization might have severe repercussions. Adversarial attacks are widely studied cyberattacks that can lead DL models to predict inaccurate output, such as incorrectly classified traffic signs by the perception module of an autonomous vehicle. In this study, we create and compare hybrid classical-quantum deep learning (HCQ-DL) models with classical deep learning (C-DL) models to demonstrate robustness against adversarial attacks for perception modules. Before feeding them into the quantum system, we used transfer learning models, alexnet and vgg-16, as feature extractors. We tested over 1000 quantum circuits in our HCQ-DL models for projected gradient descent (PGD), fast gradient sign attack (FGSA), and gradient attack (GA), which are three well-known untargeted adversarial approaches. We evaluated the performance of all models during adversarial attacks and no-attack scenarios. Our HCQ-DL models maintain accuracy above 95\% during a no-attack scenario and above 91\% for GA and FGSA attacks, which is higher than C-DL models. During the PGD attack, our alexnet-based HCQ-DL model maintained an accuracy of 85\% compared to C-DL models that achieved accuracies below 21\%. Our results highlight that the HCQ-DL models provide improved accuracy for traffic sign classification under adversarial settings compared to their classical counterparts.
Development and Evaluation of Ensemble Learning-based Environmental Methane Detection and Intensity Prediction Models
Dec 18, 2023The environmental impacts of global warming driven by methane (CH4) emissions have catalyzed significant research initiatives in developing novel technologies that enable proactive and rapid detection of CH4. Several data-driven machine learning (ML) models were tested to determine how well they identified fugitive CH4 and its related intensity in the affected areas. Various meteorological characteristics, including wind speed, temperature, pressure, relative humidity, water vapor, and heat flux, were included in the simulation. We used the ensemble learning method to determine the best-performing weighted ensemble ML models built upon several weaker lower-layer ML models to (i) detect the presence of CH4 as a classification problem and (ii) predict the intensity of CH4 as a regression problem.
A Hybrid Defense Method against Adversarial Attacks on Traffic Sign Classifiers in Autonomous Vehicles
Apr 25, 2022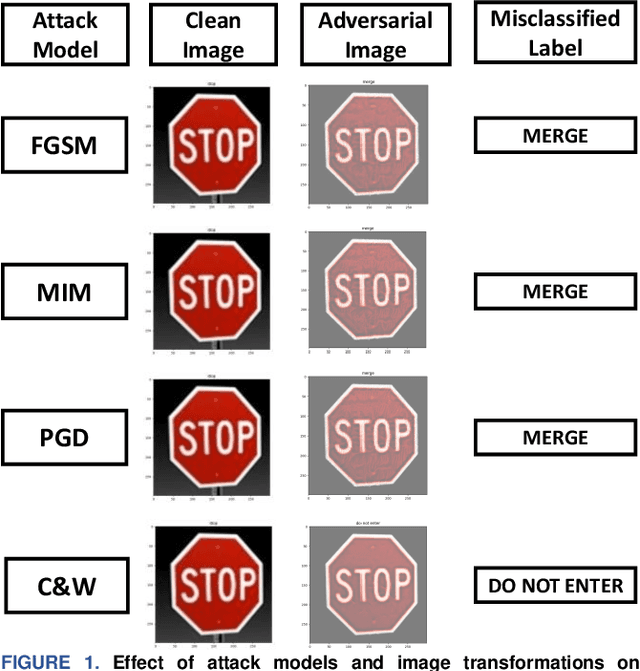
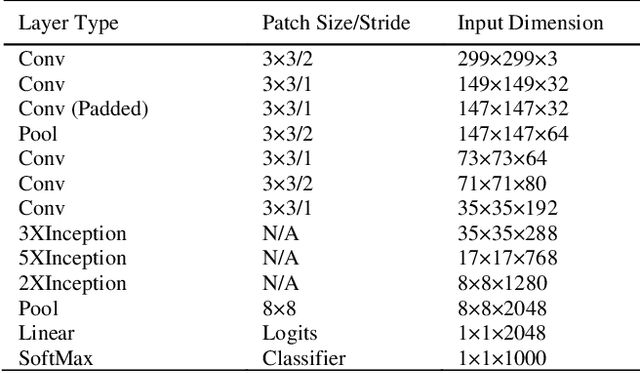
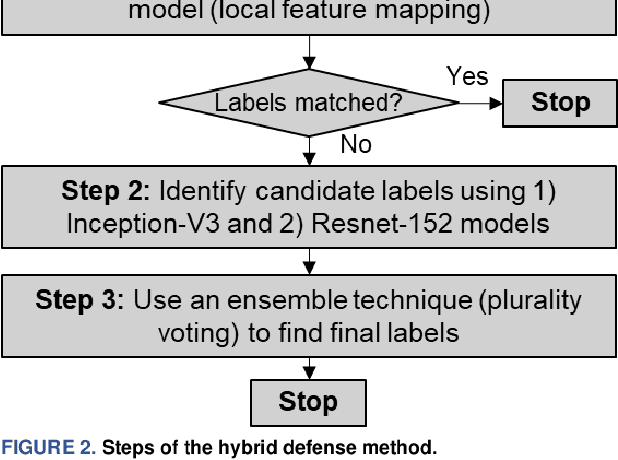

Adversarial attacks can make deep neural network (DNN) models predict incorrect output labels, such as misclassified traffic signs, for autonomous vehicle (AV) perception modules. Resilience against adversarial attacks can help AVs navigate safely on the road by avoiding misclassication of signs or objects. This DNN-based study develops a resilient traffic sign classifier for AVs that uses a hybrid defense method. We use transfer learning to retrain the Inception-V3 and Resnet-152 models as traffic sign classifiers. This method also utilizes a combination of three different strategies: random filtering, ensembling, and local feature mapping. We use the random cropping and resizing technique for random filtering, plurality voting as ensembling strategy and an optical character recognition model as a local feature mapper. This DNN-based hybrid defense method has been tested for the no attack scenario and against well-known untargeted adversarial attacks (e.g., Projected Gradient Descent or PGD, Fast Gradient Sign Method or FGSM, Momentum Iterative Method or MIM attack, and Carlini and Wagner or C&W). We find that our hybrid defense method achieves 99% average traffic sign classification accuracy for the no attack scenario and 88% average traffic sign classification accuracy for all attack scenarios. Moreover, the hybrid defense method, presented in this study, improves the accuracy for traffic sign classification compared to the traditional defense methods (i.e., JPEG filtering, feature squeezing, binary filtering, and random filtering) up to 6%, 50%, and 55% for FGSM, MIM, and PGD attacks, respectively.
Hybrid Quantum-Classical Neural Network for Cloud-supported In-Vehicle Cyberattack Detection
Oct 14, 2021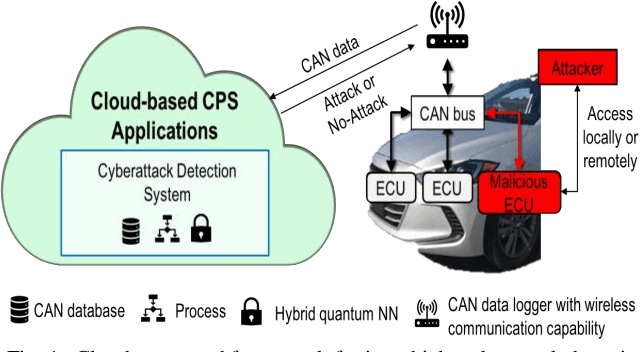
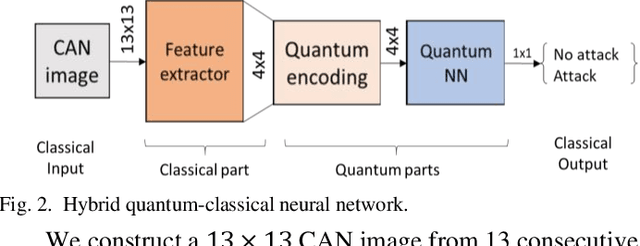
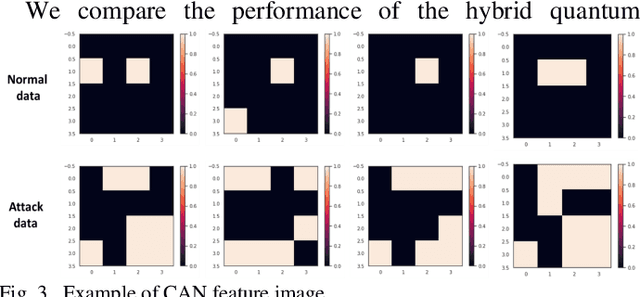
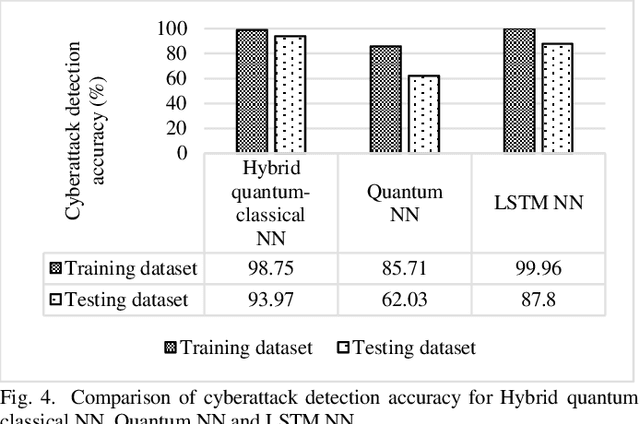
A classical computer works with ones and zeros, whereas a quantum computer uses ones, zeros, and superpositions of ones and zeros, which enables quantum computers to perform a vast number of calculations simultaneously compared to classical computers. In a cloud-supported cyber-physical system environment, running a machine learning application in quantum computers is often difficult, due to the existing limitations of the current quantum devices. However, with the combination of quantum-classical neural networks (NN), complex and high-dimensional features can be extracted by the classical NN to a reduced but more informative feature space to be processed by the existing quantum computers. In this study, we develop a hybrid quantum-classical NN to detect an amplitude shift cyber-attack on an in-vehicle control area network (CAN) dataset. We show that using the hybrid quantum classical NN, it is possible to achieve an attack detection accuracy of 94%, which is higher than a Long short-term memory (LSTM) NN (87%) or quantum NN alone (62%)
Hybrid Quantum-Classical Neural Network for Incident Detection
Aug 02, 2021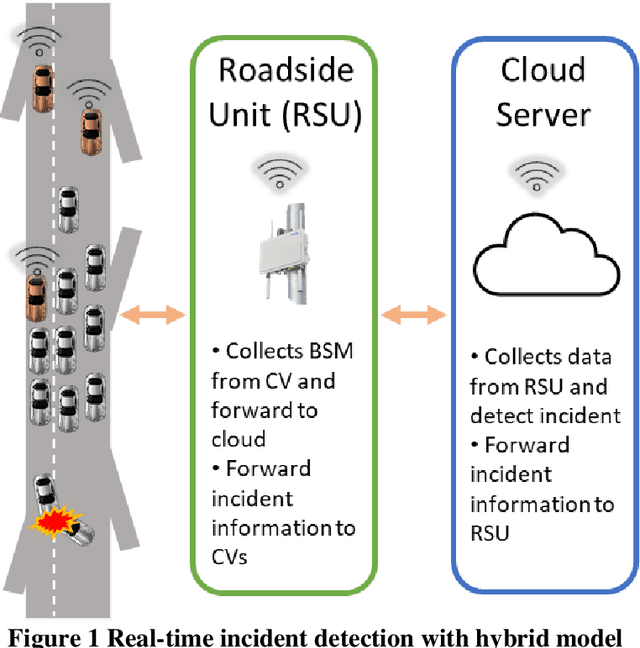
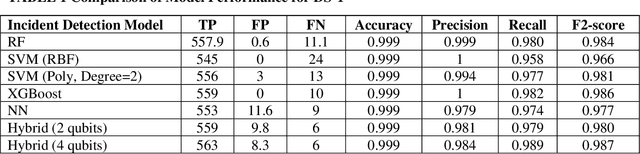
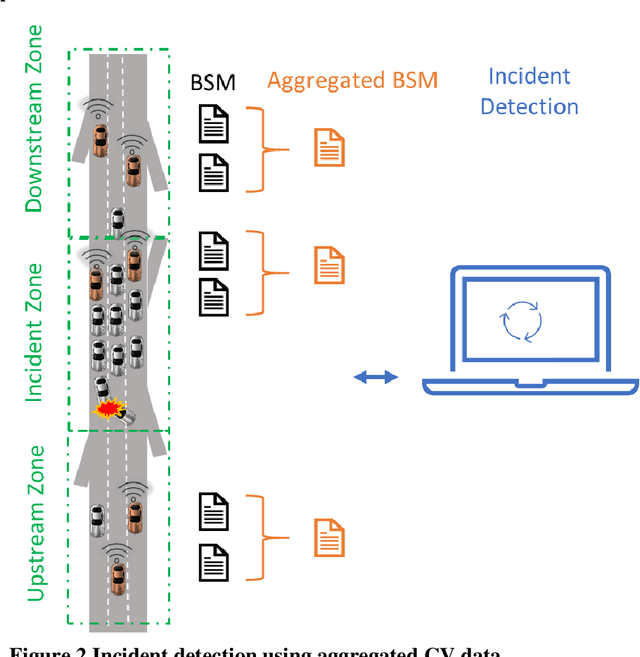
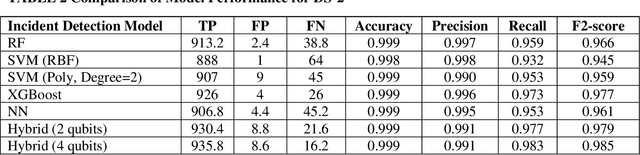
The efficiency and reliability of real-time incident detection models directly impact the affected corridors' traffic safety and operational conditions. The recent emergence of cloud-based quantum computing infrastructure and innovations in noisy intermediate-scale quantum devices have revealed a new era of quantum-enhanced algorithms that can be leveraged to improve real-time incident detection accuracy. In this research, a hybrid machine learning model, which includes classical and quantum machine learning (ML) models, is developed to identify incidents using the connected vehicle (CV) data. The incident detection performance of the hybrid model is evaluated against baseline classical ML models. The framework is evaluated using data from a microsimulation tool for different incident scenarios. The results indicate that a hybrid neural network containing a 4-qubit quantum layer outperforms all other baseline models when there is a lack of training data. We have created three datasets; DS-1 with sufficient training data, and DS-2 and DS-3 with insufficient training data. The hybrid model achieves a recall of 98.9%, 98.3%, and 96.6% for DS-1, DS-2, and DS-3, respectively. For DS-2 and DS-3, the average improvement in F2-score (measures model's performance to correctly identify incidents) achieved by the hybrid model is 1.9% and 7.8%, respectively, compared to the classical models. It shows that with insufficient data, which may be common for CVs, the hybrid ML model will perform better than the classical models. With the continuing improvements of quantum computing infrastructure, the quantum ML models could be a promising alternative for CV-related applications when the available data is insufficient.
Hybrid Classical-Quantum Deep Learning Models for Autonomous Vehicle Traffic Image Classification Under Adversarial Attack
Aug 02, 2021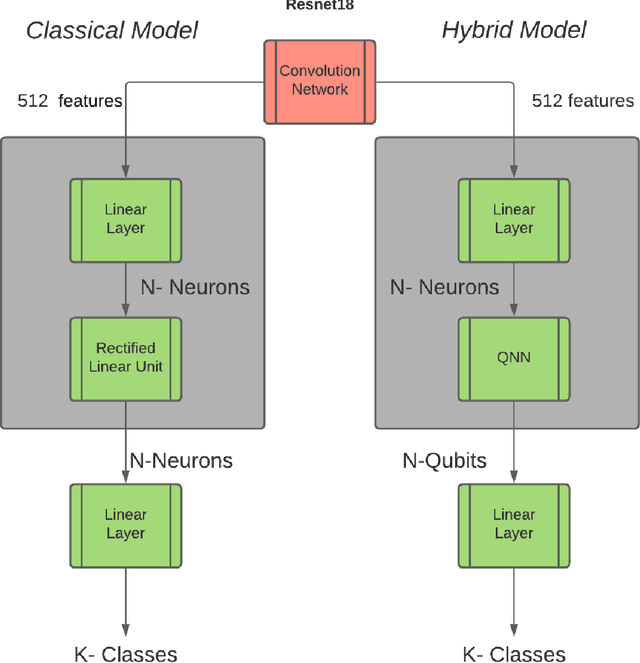



Image classification must work for autonomous vehicles (AV) operating on public roads, and actions performed based on image misclassification can have serious consequences. Traffic sign images can be misclassified by an adversarial attack on machine learning models used by AVs for traffic sign recognition. To make classification models resilient against adversarial attacks, we used a hybrid deep-learning model with both the quantum and classical layers. Our goal is to study the hybrid deep-learning architecture for classical-quantum transfer learning models to support the current era of intermediate-scale quantum technology. We have evaluated the impacts of various white box adversarial attacks on these hybrid models. The classical part of hybrid models includes a convolution network from the pre-trained Resnet18 model, which extracts informative features from a high dimensional LISA traffic sign image dataset. The output from the classical processor is processed further through the quantum layer, which is composed of various quantum gates and provides support to various quantum mechanical features like entanglement and superposition. We have tested multiple combinations of quantum circuits to provide better classification accuracy with decreasing training data and found better resiliency for our hybrid classical-quantum deep learning model during attacks compared to the classical-only machine learning models.
Efficacy of Statistical and Artificial Intelligence-based False Information Cyberattack Detection Models for Connected Vehicles
Aug 02, 2021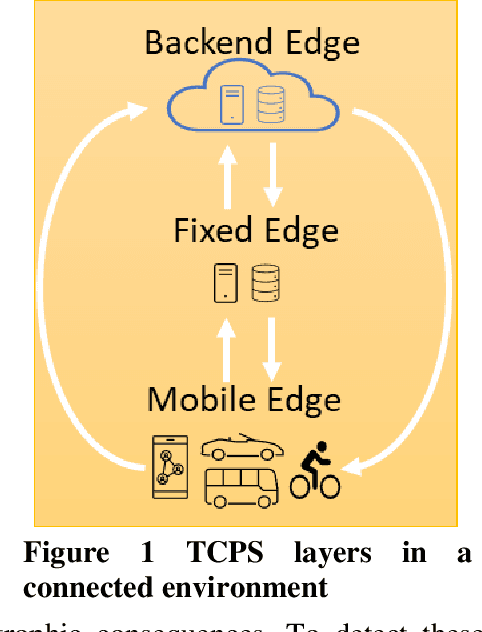



Connected vehicles (CVs), because of the external connectivity with other CVs and connected infrastructure, are vulnerable to cyberattacks that can instantly compromise the safety of the vehicle itself and other connected vehicles and roadway infrastructure. One such cyberattack is the false information attack, where an external attacker injects inaccurate information into the connected vehicles and eventually can cause catastrophic consequences by compromising safety-critical applications like the forward collision warning. The occurrence and target of such attack events can be very dynamic, making real-time and near-real-time detection challenging. Change point models, can be used for real-time anomaly detection caused by the false information attack. In this paper, we have evaluated three change point-based statistical models; Expectation Maximization, Cumulative Summation, and Bayesian Online Change Point Algorithms for cyberattack detection in the CV data. Also, data-driven artificial intelligence (AI) models, which can be used to detect known and unknown underlying patterns in the dataset, have the potential of detecting a real-time anomaly in the CV data. We have used six AI models to detect false information attacks and compared the performance for detecting the attacks with our developed change point models. Our study shows that change points models performed better in real-time false information attack detection compared to the performance of the AI models. Change point models having the advantage of no training requirements can be a feasible and computationally efficient alternative to AI models for false information attack detection in connected vehicles.
Situation-Aware Left-Turning Connected and Automated Vehicle Operation at Signalized Intersections
Aug 02, 2019

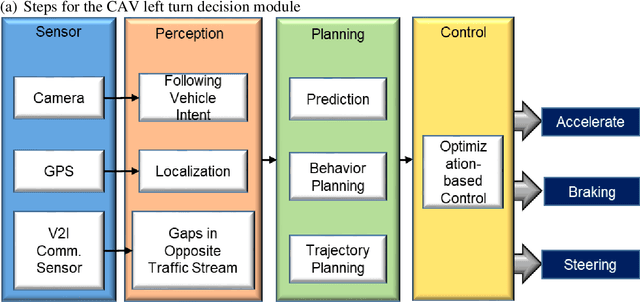

One challenging aspect of the Connected and Automated Vehicle (CAV) operation in mixed traffic is the development of a situation awareness module for CAVs. While operating on public roads, CAVs need to assess the surrounding, especially intentions of non-CAVs. Generally, CAVs demonstrate a defensive driving behavior, and CAVs expect other non-autonomous entities on the road will follow the traffic rules or common driving norms. However, the presence of aggressive human drivers in the surrounding environment, who may not follow traffic rules and behave abruptly, can lead to serious safety consequences. In this paper, we have addressed the CAV and non-CAV interaction by evaluating a situation awareness module for left-turning CAV operations in an urban area. Existing literature does not consider the intent of the follower vehicle for a left-turning movement of a CAV, and existing CAV controllers do not assess intents of the follower non-CAVs. Based on our simulation study, the situation-aware CAV controller module reduces 40% of the abrupt braking of the follower non-CAVs for the scenario of 600 vphpl on the opposing through movement, compared to the base scenario with the autonomous vehicle without considering intents of the follower vehicles. For opposite through traffic volumes with 800 and 1000 vphpln, the reduction decreases to 10%. The analysis shows that the average travel time reductions for the opposite through traffic volumes of 600, 800 and 1000 vphpln are 61%, 23%, and 41%, respectively, for the follower non-CAV if the intent of the follower vehicle is considered by a CAV in making a left turn at an intersection.
Development and Evaluation of Recurrent Neural Network based Models for Hourly Traffic Volume and AADT Prediction
Sep 10, 2018

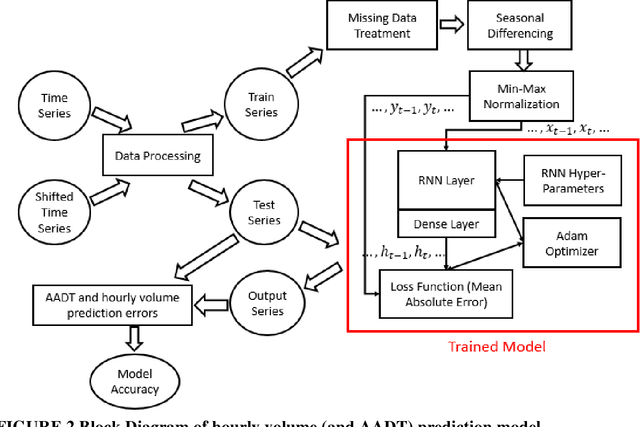

The prediction of high-resolution hourly traffic volumes of a given roadway is essential for future planning in a transportation system. Traditionally, Automatic Traffic Recorders (ATR) are used to collect this hourly volume data, which is often used to predict future traffic volumes accurately. However, these large data sets generated from these various ATRs are time series data characterized by long-term temporal dependencies and missing data sets. Regarding the temporal dependencies, all roadways are characterized by seasonal variations that can be weekly, monthly or yearly, depending on the cause of the variation. Regarding the missing data in a time-series sequence, traditional time series forecasting models perform poorly under their influence. Therefore, a robust, Recurrent Neural Network (RNN) based, multi-step ahead time-series forecasting model is developed in this study. The simple RNN, the Gated Recurrent Unit (GRU) and the Long Short-Term Memory (LSTM) units are used to develop the model and evaluate its performance. Two novel approaches are used to address the missing value issue: masking and imputation, in conjunction with the RNN unit. Six different imputation algorithms are then used to identify the best model. Our analyses indicate that the LSTM model performs better than simple RNN and GRU models, and imputation performs better than masking. The performance of imputation methods is also dependent on the percentage of missing data in the input dataset. Overall, the LSTM-Median model is deemed the best model in all scenarios for AADT prediction, with an average accuracy of 98.5%.
Development of Statewide AADT Estimation Model from Short-Term Counts: A Comparative Study for South Carolina
Nov 30, 2017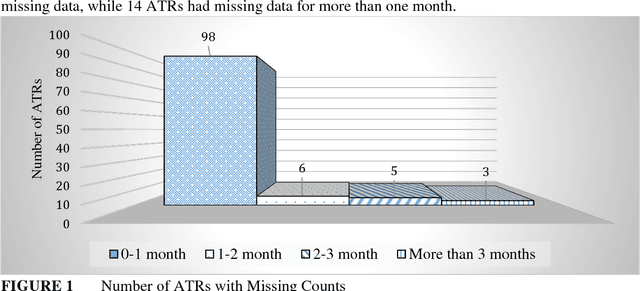
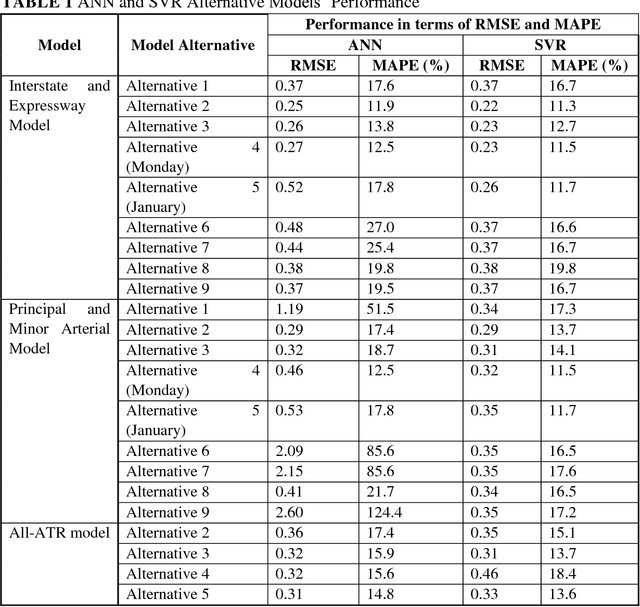
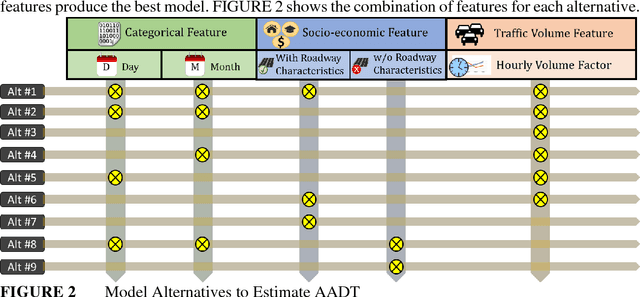

Annual Average Daily Traffic (AADT) is an important parameter used in traffic engineering analysis. Departments of Transportation (DOTs) continually collect traffic count using both permanent count stations (i.e., Automatic Traffic Recorders or ATRs) and temporary short-term count stations. In South Carolina, 87% of the ATRs are located on interstates and arterial highways. For most secondary highways (i.e., collectors and local roads), AADT is estimated based on short-term counts. This paper develops AADT estimation models for different roadway functional classes with two machine learning techniques: Artificial Neural Network (ANN) and Support Vector Regression (SVR). The models aim to predict AADT from short-term counts. The results are first compared against each other to identify the best model. Then, the results of the best model are compared against a regression method and factor-based method. The comparison reveals the superiority of SVR for AADT estimation for different roadway functional classes over all other methods. Among all developed models for different functional roadway classes, the SVR-based model shows a minimum root mean square error (RMSE) of 0.22 and a mean absolute percentage error (MAPE) of 11.3% for the interstate/expressway functional class. This model also shows a higher R-squared value compared to the traditional factor-based model and regression model. SVR models are validated for each roadway functional class using the 2016 ATR data and selected short-term count data collected by the South Carolina Department of Transportation (SCDOT). The validation results show that the SVR-based AADT estimation models can be used by the SCDOT as a reliable option to predict AADT from the short-term counts.