 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Computing Supported Adversarial Attack-Resilient Autonomous Vehicle Perception Module for Traffic Sign Classification
Apr 17, 2025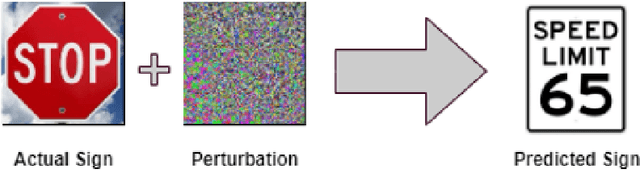
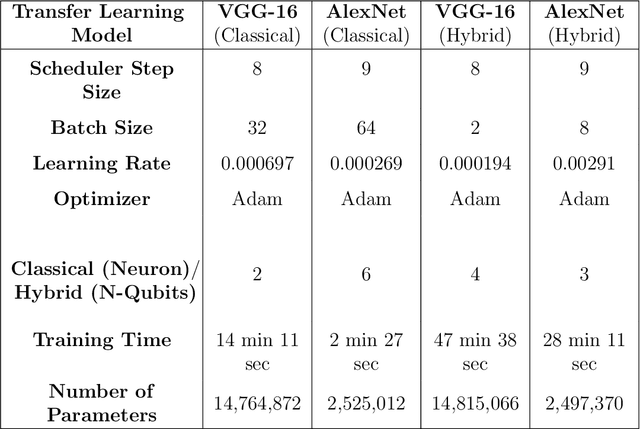
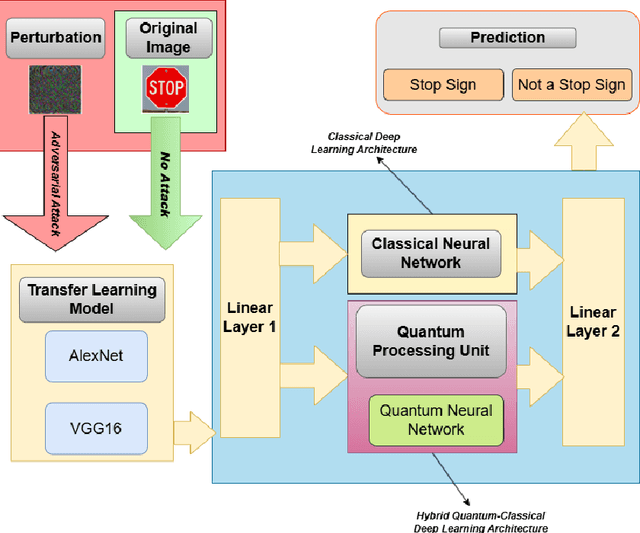
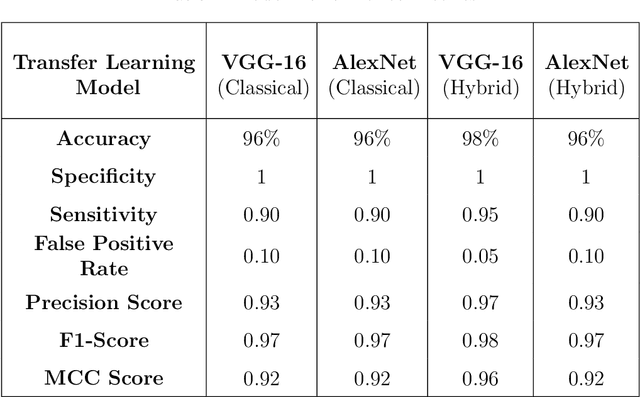
Deep learning (DL)-based image classification models are essential for autonomous vehicle (AV) perception modules since incorrect categorization might have severe repercussions. Adversarial attacks are widely studied cyberattacks that can lead DL models to predict inaccurate output, such as incorrectly classified traffic signs by the perception module of an autonomous vehicle. In this study, we create and compare hybrid classical-quantum deep learning (HCQ-DL) models with classical deep learning (C-DL) models to demonstrate robustness against adversarial attacks for perception modules. Before feeding them into the quantum system, we used transfer learning models, alexnet and vgg-16, as feature extractors. We tested over 1000 quantum circuits in our HCQ-DL models for projected gradient descent (PGD), fast gradient sign attack (FGSA), and gradient attack (GA), which are three well-known untargeted adversarial approaches. We evaluated the performance of all models during adversarial attacks and no-attack scenarios. Our HCQ-DL models maintain accuracy above 95\% during a no-attack scenario and above 91\% for GA and FGSA attacks, which is higher than C-DL models. During the PGD attack, our alexnet-based HCQ-DL model maintained an accuracy of 85\% compared to C-DL models that achieved accuracies below 21\%. Our results highlight that the HCQ-DL models provide improved accuracy for traffic sign classification under adversarial settings compared to their classical counterparts.
Graph-Powered Defense: Controller Area Network Intrusion Detection for Unmanned Aerial Vehicles
Dec 03, 2024



The network of services, including delivery, farming, and environmental monitoring, has experienced exponential expansion in the past decade with Unmanned Aerial Vehicles (UAVs). Yet, UAVs are not robust enough against cyberattacks, especially on the Controller Area Network (CAN) bus. The CAN bus is a general-purpose vehicle-bus standard to enable microcontrollers and in-vehicle computers to interact, primarily connecting different Electronic Control Units (ECUs). In this study, we focus on solving some of the most critical security weaknesses in UAVs by developing a novel graph-based intrusion detection system (IDS) leveraging the Uncomplicated Application-level Vehicular Communication and Networking (UAVCAN) protocol. First, we decode CAN messages based on UAVCAN protocol specification; second, we present a comprehensive method of transforming tabular UAVCAN messages into graph structures. Lastly, we apply various graph-based machine learning models for detecting cyber-attacks on the CAN bus, including graph convolutional neural networks (GCNNs), graph attention networks (GATs), Graph Sample and Aggregate Networks (GraphSAGE), and graph structure-based transformers. Our findings show that inductive models such as GATs, GraphSAGE, and graph-based transformers can achieve competitive and even better accuracy than transductive models like GCNNs in detecting various types of intrusions, with minimum information on protocol specification, thus providing a generic robust solution for CAN bus security for the UAVs. We also compared our results with baseline single-layer Long Short-Term Memory (LSTM) and found that all our graph-based models perform better without using any decoded features based on the UAVCAN protocol, highlighting higher detection performance with protocol-independent capability.
Development and Evaluation of Ensemble Learning-based Environmental Methane Detection and Intensity Prediction Models
Dec 18, 2023The environmental impacts of global warming driven by methane (CH4) emissions have catalyzed significant research initiatives in developing novel technologies that enable proactive and rapid detection of CH4. Several data-driven machine learning (ML) models were tested to determine how well they identified fugitive CH4 and its related intensity in the affected areas. Various meteorological characteristics, including wind speed, temperature, pressure, relative humidity, water vapor, and heat flux, were included in the simulation. We used the ensemble learning method to determine the best-performing weighted ensemble ML models built upon several weaker lower-layer ML models to (i) detect the presence of CH4 as a classification problem and (ii) predict the intensity of CH4 as a regression problem.
Hybrid Classical-Quantum Deep Learning Models for Autonomous Vehicle Traffic Image Classification Under Adversarial Attack
Aug 02, 2021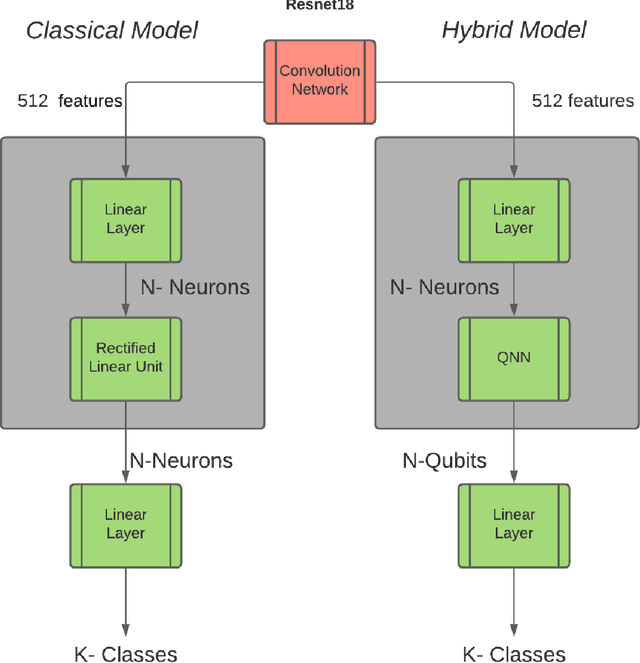



Image classification must work for autonomous vehicles (AV) operating on public roads, and actions performed based on image misclassification can have serious consequences. Traffic sign images can be misclassified by an adversarial attack on machine learning models used by AVs for traffic sign recognition. To make classification models resilient against adversarial attacks, we used a hybrid deep-learning model with both the quantum and classical layers. Our goal is to study the hybrid deep-learning architecture for classical-quantum transfer learning models to support the current era of intermediate-scale quantum technology. We have evaluated the impacts of various white box adversarial attacks on these hybrid models. The classical part of hybrid models includes a convolution network from the pre-trained Resnet18 model, which extracts informative features from a high dimensional LISA traffic sign image dataset. The output from the classical processor is processed further through the quantum layer, which is composed of various quantum gates and provides support to various quantum mechanical features like entanglement and superposition. We have tested multiple combinations of quantum circuits to provide better classification accuracy with decreasing training data and found better resiliency for our hybrid classical-quantum deep learning model during attacks compared to the classical-only machine learning models.