 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Computing Supported Adversarial Attack-Resilient Autonomous Vehicle Perception Module for Traffic Sign Classification
Apr 17, 2025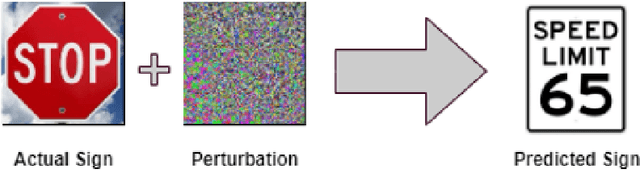
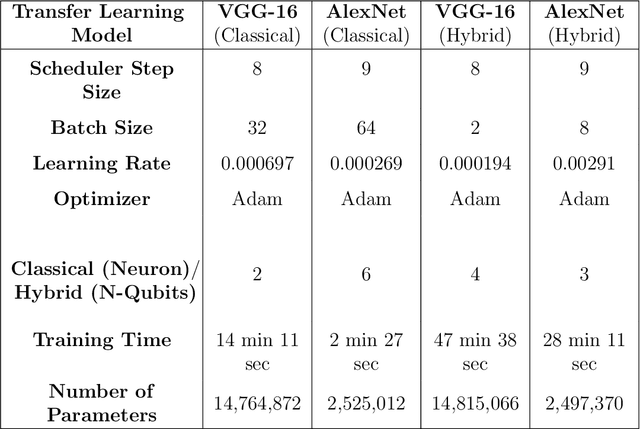
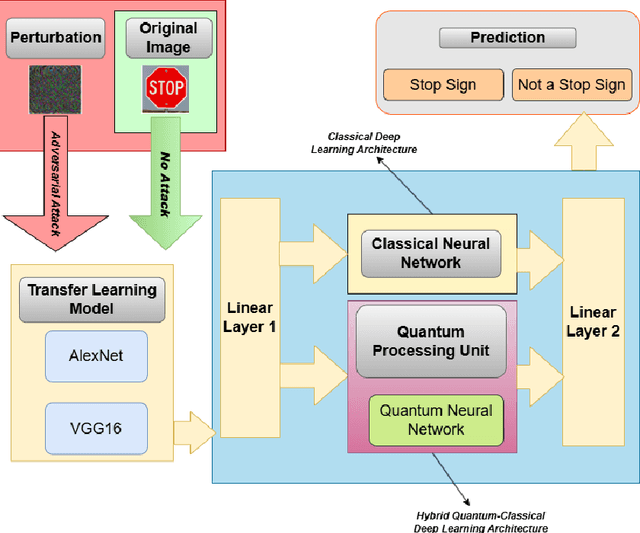
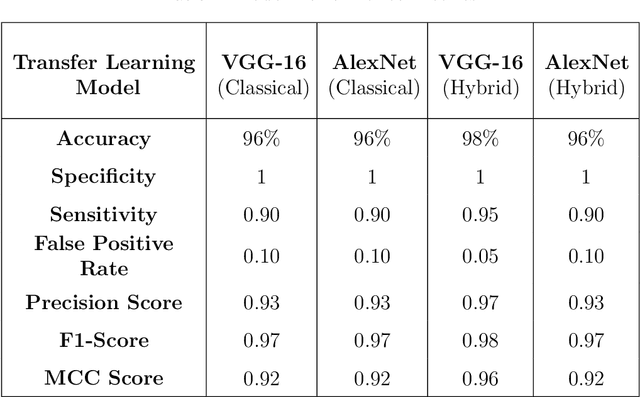
Deep learning (DL)-based image classification models are essential for autonomous vehicle (AV) perception modules since incorrect categorization might have severe repercussions. Adversarial attacks are widely studied cyberattacks that can lead DL models to predict inaccurate output, such as incorrectly classified traffic signs by the perception module of an autonomous vehicle. In this study, we create and compare hybrid classical-quantum deep learning (HCQ-DL) models with classical deep learning (C-DL) models to demonstrate robustness against adversarial attacks for perception modules. Before feeding them into the quantum system, we used transfer learning models, alexnet and vgg-16, as feature extractors. We tested over 1000 quantum circuits in our HCQ-DL models for projected gradient descent (PGD), fast gradient sign attack (FGSA), and gradient attack (GA), which are three well-known untargeted adversarial approaches. We evaluated the performance of all models during adversarial attacks and no-attack scenarios. Our HCQ-DL models maintain accuracy above 95\% during a no-attack scenario and above 91\% for GA and FGSA attacks, which is higher than C-DL models. During the PGD attack, our alexnet-based HCQ-DL model maintained an accuracy of 85\% compared to C-DL models that achieved accuracies below 21\%. Our results highlight that the HCQ-DL models provide improved accuracy for traffic sign classification under adversarial settings compared to their classical counterparts.
A Hybrid Defense Method against Adversarial Attacks on Traffic Sign Classifiers in Autonomous Vehicles
Apr 25, 2022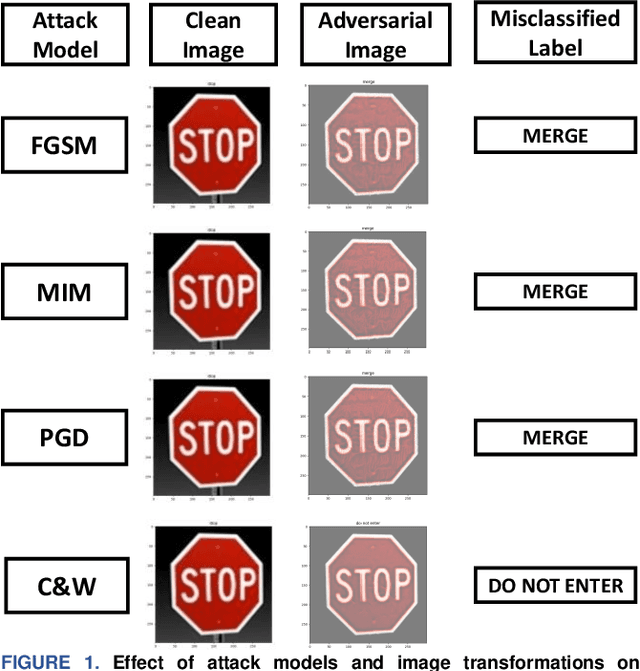
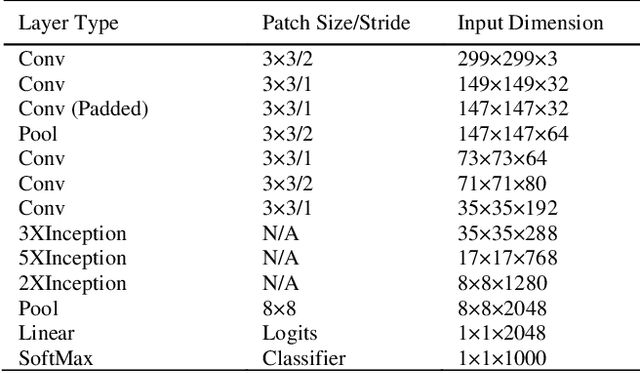
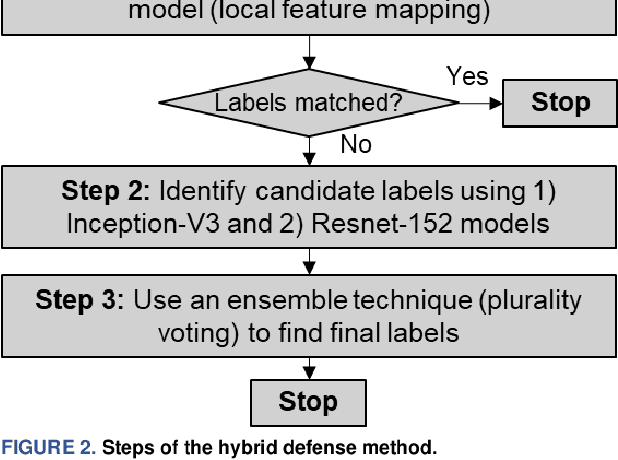

Adversarial attacks can make deep neural network (DNN) models predict incorrect output labels, such as misclassified traffic signs, for autonomous vehicle (AV) perception modules. Resilience against adversarial attacks can help AVs navigate safely on the road by avoiding misclassication of signs or objects. This DNN-based study develops a resilient traffic sign classifier for AVs that uses a hybrid defense method. We use transfer learning to retrain the Inception-V3 and Resnet-152 models as traffic sign classifiers. This method also utilizes a combination of three different strategies: random filtering, ensembling, and local feature mapping. We use the random cropping and resizing technique for random filtering, plurality voting as ensembling strategy and an optical character recognition model as a local feature mapper. This DNN-based hybrid defense method has been tested for the no attack scenario and against well-known untargeted adversarial attacks (e.g., Projected Gradient Descent or PGD, Fast Gradient Sign Method or FGSM, Momentum Iterative Method or MIM attack, and Carlini and Wagner or C&W). We find that our hybrid defense method achieves 99% average traffic sign classification accuracy for the no attack scenario and 88% average traffic sign classification accuracy for all attack scenarios. Moreover, the hybrid defense method, presented in this study, improves the accuracy for traffic sign classification compared to the traditional defense methods (i.e., JPEG filtering, feature squeezing, binary filtering, and random filtering) up to 6%, 50%, and 55% for FGSM, MIM, and PGD attacks, respectively.
Hybrid Quantum-Classical Neural Network for Cloud-supported In-Vehicle Cyberattack Detection
Oct 14, 2021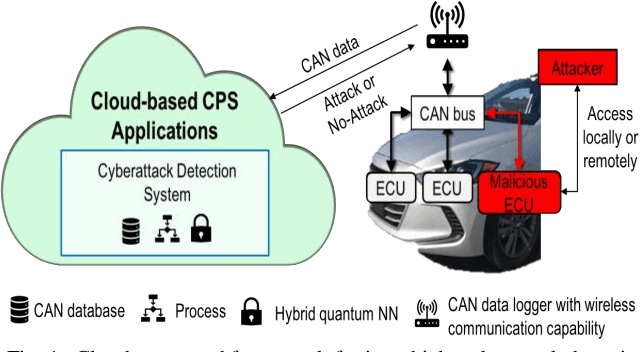
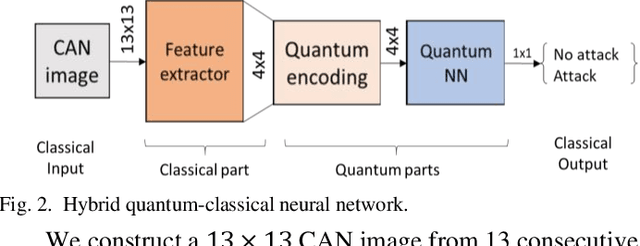
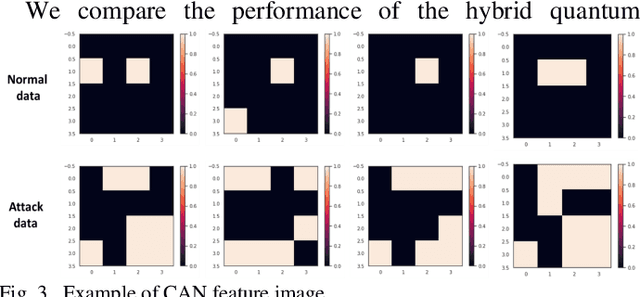
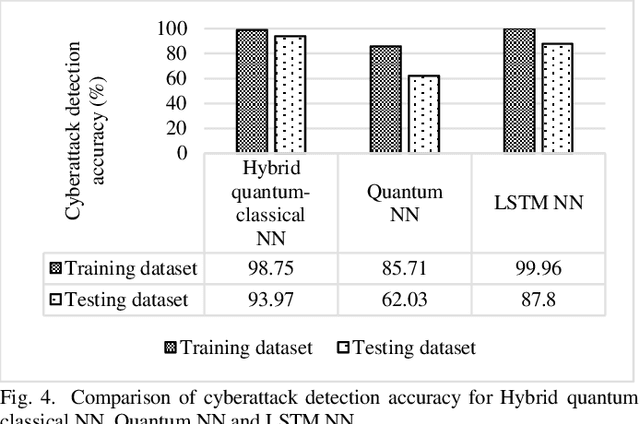
A classical computer works with ones and zeros, whereas a quantum computer uses ones, zeros, and superpositions of ones and zeros, which enables quantum computers to perform a vast number of calculations simultaneously compared to classical computers. In a cloud-supported cyber-physical system environment, running a machine learning application in quantum computers is often difficult, due to the existing limitations of the current quantum devices. However, with the combination of quantum-classical neural networks (NN), complex and high-dimensional features can be extracted by the classical NN to a reduced but more informative feature space to be processed by the existing quantum computers. In this study, we develop a hybrid quantum-classical NN to detect an amplitude shift cyber-attack on an in-vehicle control area network (CAN) dataset. We show that using the hybrid quantum classical NN, it is possible to achieve an attack detection accuracy of 94%, which is higher than a Long short-term memory (LSTM) NN (87%) or quantum NN alone (62%)
Hybrid Quantum-Classical Neural Network for Incident Detection
Aug 02, 2021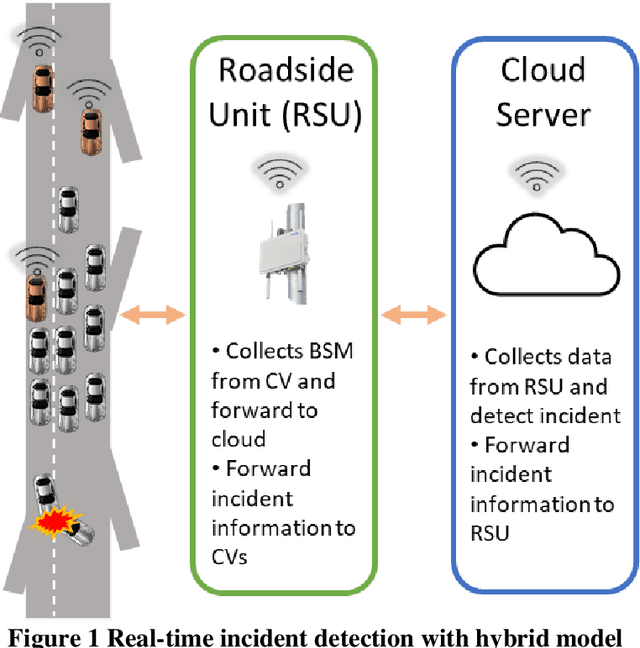
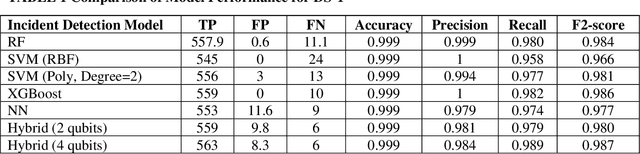
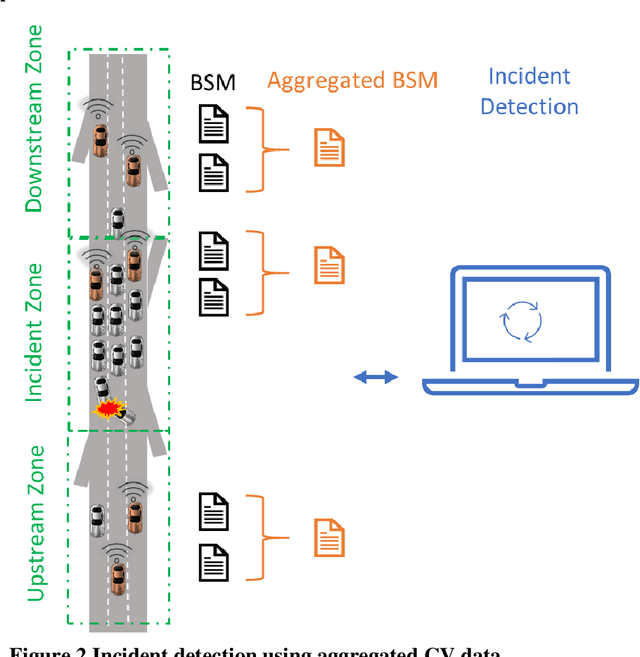
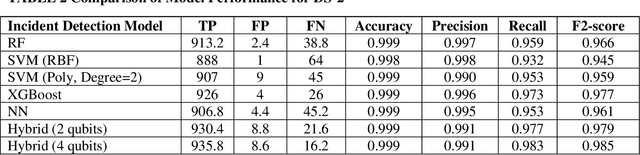
The efficiency and reliability of real-time incident detection models directly impact the affected corridors' traffic safety and operational conditions. The recent emergence of cloud-based quantum computing infrastructure and innovations in noisy intermediate-scale quantum devices have revealed a new era of quantum-enhanced algorithms that can be leveraged to improve real-time incident detection accuracy. In this research, a hybrid machine learning model, which includes classical and quantum machine learning (ML) models, is developed to identify incidents using the connected vehicle (CV) data. The incident detection performance of the hybrid model is evaluated against baseline classical ML models. The framework is evaluated using data from a microsimulation tool for different incident scenarios. The results indicate that a hybrid neural network containing a 4-qubit quantum layer outperforms all other baseline models when there is a lack of training data. We have created three datasets; DS-1 with sufficient training data, and DS-2 and DS-3 with insufficient training data. The hybrid model achieves a recall of 98.9%, 98.3%, and 96.6% for DS-1, DS-2, and DS-3, respectively. For DS-2 and DS-3, the average improvement in F2-score (measures model's performance to correctly identify incidents) achieved by the hybrid model is 1.9% and 7.8%, respectively, compared to the classical models. It shows that with insufficient data, which may be common for CVs, the hybrid ML model will perform better than the classical models. With the continuing improvements of quantum computing infrastructure, the quantum ML models could be a promising alternative for CV-related applications when the available data is insufficient.
Hybrid Classical-Quantum Deep Learning Models for Autonomous Vehicle Traffic Image Classification Under Adversarial Attack
Aug 02, 2021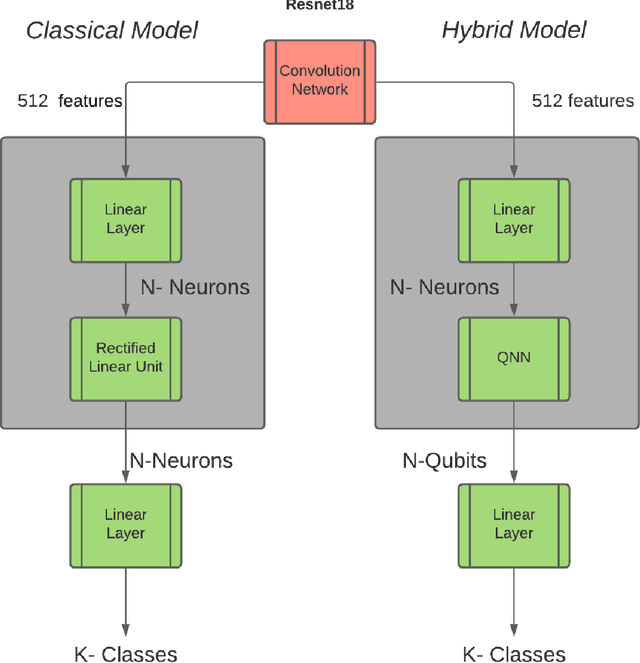



Image classification must work for autonomous vehicles (AV) operating on public roads, and actions performed based on image misclassification can have serious consequences. Traffic sign images can be misclassified by an adversarial attack on machine learning models used by AVs for traffic sign recognition. To make classification models resilient against adversarial attacks, we used a hybrid deep-learning model with both the quantum and classical layers. Our goal is to study the hybrid deep-learning architecture for classical-quantum transfer learning models to support the current era of intermediate-scale quantum technology. We have evaluated the impacts of various white box adversarial attacks on these hybrid models. The classical part of hybrid models includes a convolution network from the pre-trained Resnet18 model, which extracts informative features from a high dimensional LISA traffic sign image dataset. The output from the classical processor is processed further through the quantum layer, which is composed of various quantum gates and provides support to various quantum mechanical features like entanglement and superposition. We have tested multiple combinations of quantum circuits to provide better classification accuracy with decreasing training data and found better resiliency for our hybrid classical-quantum deep learning model during attacks compared to the classical-only machine learning models.
Grey Models for Short-Term Queue Length Predictions for Adaptive Traffic Signal Control
Dec 29, 2019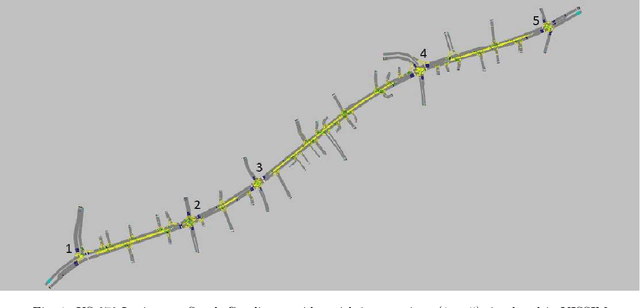

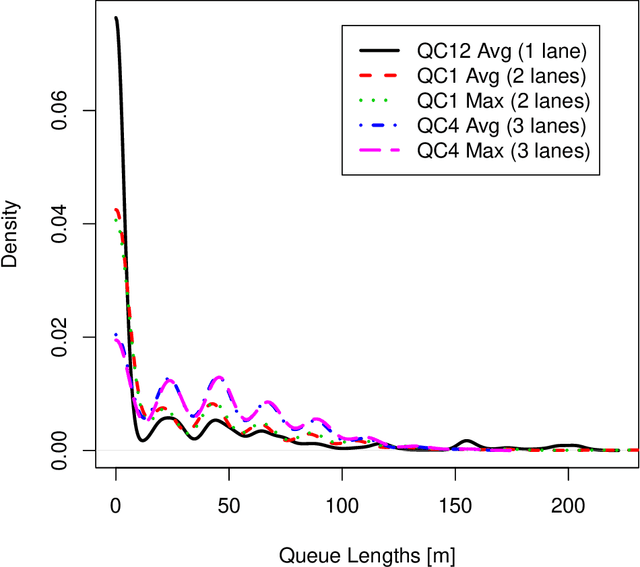

Traffic congestion at a signalized intersection greatly reduces the travel time reliability in urban areas. Adaptive signal control system (ASCS) is the most advanced traffic signal technology that regulates the signal phasing and timings considering the patterns in real-time in order to reduce congestion. Real-time prediction of queue lengths can be used to adjust the phasing and timings for different movements at an intersection with ASCS. The accuracy of the prediction varies based on the factors, such as the stochastic nature of the vehicle arrival rates, time of the day, weather and driver characteristics. In addition, accurate prediction for multilane, undersaturated and saturated traffic scenarios is challenging. Thus, the objective of this study is to develop queue length prediction models for signalized intersections that can be leveraged by ASCS using four variations of Grey systems: (i) the first order single variable Grey model (GM(1,1)); (ii) GM(1,1) with Fourier error corrections; (iii) the Grey Verhulst model (GVM), and (iv) GVM with Fourier error corrections. The efficacy of the GM is that they facilitate fast processing; as these models do not require a large amount of data; as would be needed in artificial intelligence models; and they are able to adapt to stochastic changes, unlike statistical models. We have conducted a case study using queue length data from five intersections with ASCS on a calibrated roadway network in Lexington, South Carolina. GM were compared with linear, nonlinear time series models, and long short-term memory (LSTM) neural network. Based on our analyses, we found that EGVM reduces the prediction error over closest competing models (i.e., LSTM and time series models) in predicting average and maximum queue lengths by 40% and 42%, respectively, in terms of Root Mean Squared Error, and 51% and 50%, respectively, in terms of Mean Absolute Error.
In-Vehicle False Information Attack Detection and Mitigation Framework using Machine Learning and Software Defined Networking
Jun 24, 2019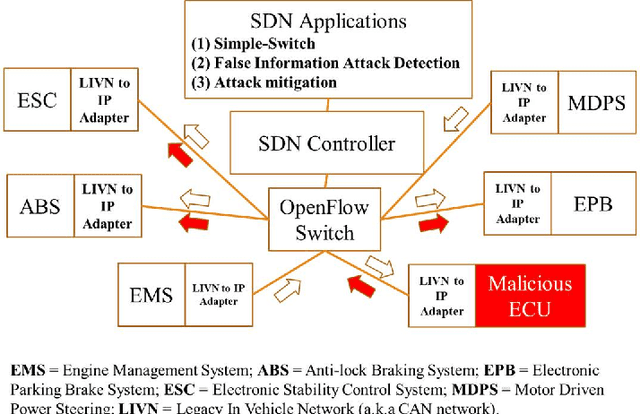

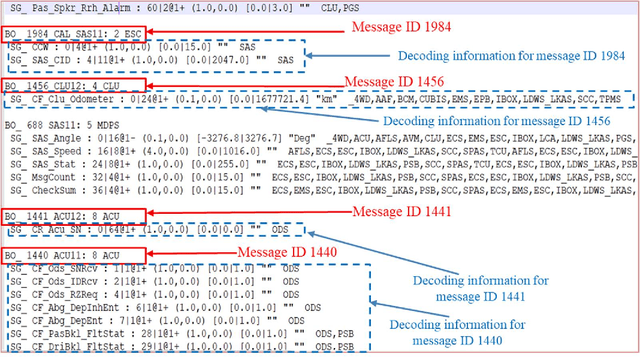
A modern vehicle contains many electronic control units (ECUs), which communicate with each other through the Controller Area Network (CAN) bus to ensure vehicle safety and performance. Emerging Connected and Automated Vehicles (CAVs) will have more ECUs and coupling between them due to the vast array of additional sensors, advanced driving features (such as lane keeping and navigation) and Vehicle-to-Everything (V2X) connectivity. As a result, CAVs will have more vulnerabilities within the in-vehicle network. In this study, we develop a software defined networking (SDN) based in-vehicle networking framework for security against false information attacks on CAN frames. We then created an attack model and attack datasets for false information attacks on brake-related ECUs in an SDN based in-vehicle network. We subsequently developed a machine-learning based false information attack/anomaly detection model for the real-time detection of anomalies within the in-vehicle network. Specifically, we utilized the concept of time-series classification and developed a Long Short-Term Memory (LSTM) based model that detects false information within the CAN data traffic. Additionally, based on our research, we highlighted policies for mitigating the effect of cyber-attacks using the SDN framework. The SDN-based attack detection model can detect false information with an accuracy, precision and recall of 95%, 95% and 87%, respectively, while satisfying the real-time communication and computational requirements.