 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Vehicle False Information Attack Detection and Mitigation Framework using Machine Learning and Software Defined Networking
Paper and Code
Jun 24, 2019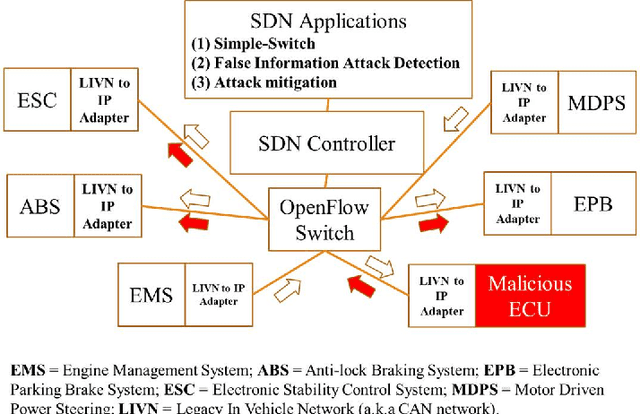

A modern vehicle contains many electronic control units (ECUs), which communicate with each other through the Controller Area Network (CAN) bus to ensure vehicle safety and performance. Emerging Connected and Automated Vehicles (CAVs) will have more ECUs and coupling between them due to the vast array of additional sensors, advanced driving features (such as lane keeping and navigation) and Vehicle-to-Everything (V2X) connectivity. As a result, CAVs will have more vulnerabilities within the in-vehicle network. In this study, we develop a software defined networking (SDN) based in-vehicle networking framework for security against false information attacks on CAN frames. We then created an attack model and attack datasets for false information attacks on brake-related ECUs in an SDN based in-vehicle network. We subsequently developed a machine-learning based false information attack/anomaly detection model for the real-time detection of anomalies within the in-vehicle network. Specifically, we utilized the concept of time-series classification and developed a Long Short-Term Memory (LSTM) based model that detects false information within the CAN data traffic. Additionally, based on our research, we highlighted policies for mitigating the effect of cyber-attacks using the SDN framework. The SDN-based attack detection model can detect false information with an accuracy, precision and recall of 95%, 95% and 87%, respectively, while satisfying the real-time communication and computational requirements.