 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-Powered Defense: Controller Area Network Intrusion Detection for Unmanned Aerial Vehicles
Dec 03, 2024



The network of services, including delivery, farming, and environmental monitoring, has experienced exponential expansion in the past decade with Unmanned Aerial Vehicles (UAVs). Yet, UAVs are not robust enough against cyberattacks, especially on the Controller Area Network (CAN) bus. The CAN bus is a general-purpose vehicle-bus standard to enable microcontrollers and in-vehicle computers to interact, primarily connecting different Electronic Control Units (ECUs). In this study, we focus on solving some of the most critical security weaknesses in UAVs by developing a novel graph-based intrusion detection system (IDS) leveraging the Uncomplicated Application-level Vehicular Communication and Networking (UAVCAN) protocol. First, we decode CAN messages based on UAVCAN protocol specification; second, we present a comprehensive method of transforming tabular UAVCAN messages into graph structures. Lastly, we apply various graph-based machine learning models for detecting cyber-attacks on the CAN bus, including graph convolutional neural networks (GCNNs), graph attention networks (GATs), Graph Sample and Aggregate Networks (GraphSAGE), and graph structure-based transformers. Our findings show that inductive models such as GATs, GraphSAGE, and graph-based transformers can achieve competitive and even better accuracy than transductive models like GCNNs in detecting various types of intrusions, with minimum information on protocol specification, thus providing a generic robust solution for CAN bus security for the UAVs. We also compared our results with baseline single-layer Long Short-Term Memory (LSTM) and found that all our graph-based models perform better without using any decoded features based on the UAVCAN protocol, highlighting higher detection performance with protocol-independent capability.
A Hybrid Quantum-Classical AI-Based Detection Strategy for Generative Adversarial Network-Based Deepfake Attacks on an Autonomous Vehicle Traffic Sign Classification System
Sep 25, 2024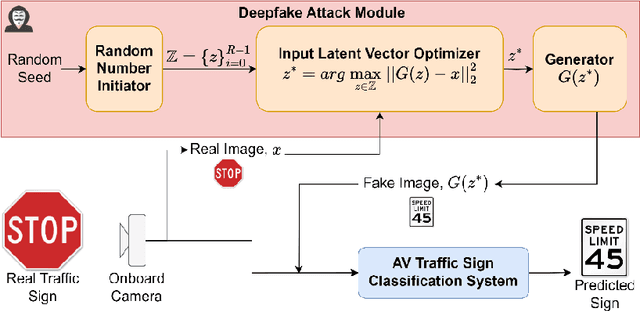

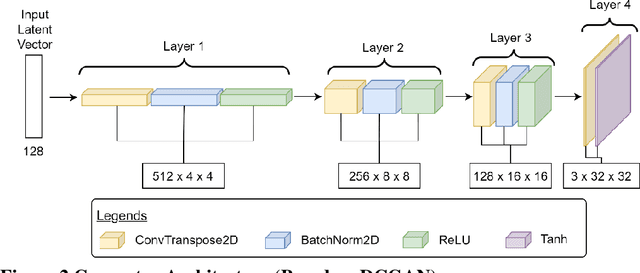

The perception module in autonomous vehicles (AVs) relies heavily on deep learning-based models to detect and identify various objects in their surrounding environment. An AV traffic sign classification system is integral to this module, which helps AVs recognize roadway traffic signs. However, adversarial attacks, in which an attacker modifies or alters the image captured for traffic sign recognition, could lead an AV to misrecognize the traffic signs and cause hazardous consequences. Deepfake presents itself as a promising technology to be used for such adversarial attacks, in which a deepfake traffic sign would replace a real-world traffic sign image before the image is fed to the AV traffic sign classification system. In this study, the authors present how a generative adversarial network-based deepfake attack can be crafted to fool the AV traffic sign classification systems. The authors developed a deepfake traffic sign image detection strategy leveraging hybrid quantum-classical neural networks (NNs). This hybrid approach utilizes amplitude encoding to represent the features of an input traffic sign image using quantum states, which substantially reduces the memory requirement compared to its classical counterparts. The authors evaluated this hybrid deepfake detection approach along with several baseline classical convolutional NNs on real-world and deepfake traffic sign images. The results indicate that the hybrid quantum-classical NNs for deepfake detection could achieve similar or higher performance than the baseline classical convolutional NNs in most cases while requiring less than one-third of the memory required by the shallowest classical convolutional NN considered in this study.
Development and Evaluation of Ensemble Learning-based Environmental Methane Detection and Intensity Prediction Models
Dec 18, 2023The environmental impacts of global warming driven by methane (CH4) emissions have catalyzed significant research initiatives in developing novel technologies that enable proactive and rapid detection of CH4. Several data-driven machine learning (ML) models were tested to determine how well they identified fugitive CH4 and its related intensity in the affected areas. Various meteorological characteristics, including wind speed, temperature, pressure, relative humidity, water vapor, and heat flux, were included in the simulation. We used the ensemble learning method to determine the best-performing weighted ensemble ML models built upon several weaker lower-layer ML models to (i) detect the presence of CH4 as a classification problem and (ii) predict the intensity of CH4 as a regression problem.