 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControllable Image Synthesis of Industrial Data Using Stable Diffusion
Jan 06, 2024



Training supervised deep neural networks that perform defect detection and segmentation requires large-scale fully-annotated datasets, which can be hard or even impossible to obtain in industrial environments. Generative AI offers opportunities to enlarge small industrial datasets artificially, thus enabling the usage of state-of-the-art supervised approaches in the industry. Unfortunately, also good generative models need a lot of data to train, while industrial datasets are often tiny. Here, we propose a new approach for reusing general-purpose pre-trained generative models on industrial data, ultimately allowing the generation of self-labelled defective images. First, we let the model learn the new concept, entailing the novel data distribution. Then, we force it to learn to condition the generative process, producing industrial images that satisfy well-defined topological characteristics and show defects with a given geometry and location. To highlight the advantage of our approach, we use the synthetic dataset to optimise a crack segmentor for a real industrial use case. When the available data is small, we observe considerable performance increase under several metrics, showing the method's potential in production environments.
Combining Thermodynamics-based Model of the Centrifugal Compressors and Active Machine Learning for Enhanced Industrial Design Optimization
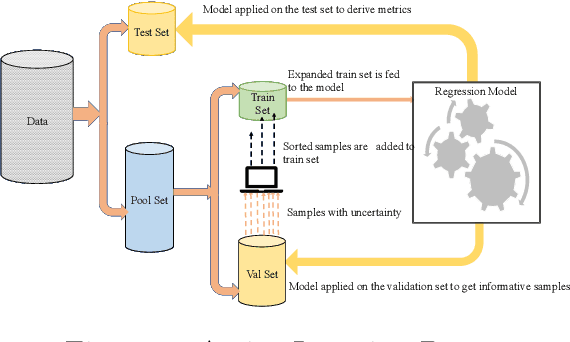
Sep 06, 2023The design process of centrifugal compressors requires applying an optimization process which is computationally expensive due to complex analytical equations underlying the compressor's dynamical equations. Although the regression surrogate models could drastically reduce the computational cost of such a process, the major challenge is the scarcity of data for training the surrogate model. Aiming to strategically exploit the labeled samples, we propose the Active-CompDesign framework in which we combine a thermodynamics-based compressor model (i.e., our internal software for compressor design) and Gaussian Process-based surrogate model within a deployable Active Learning (AL) setting. We first conduct experiments in an offline setting and further, extend it to an online AL framework where a real-time interaction with the thermodynamics-based compressor's model allows the deployment in production. ActiveCompDesign shows a significant performance improvement in surrogate modeling by leveraging on uncertainty-based query function of samples within the AL framework with respect to the random selection of data points. Moreover, our framework in production has reduced the total computational time of compressor's design optimization to around 46% faster than relying on the internal thermodynamics-based simulator, achieving the same performance.
Deep Surrogate of Modular Multi Pump using Active Learning
Aug 04, 2022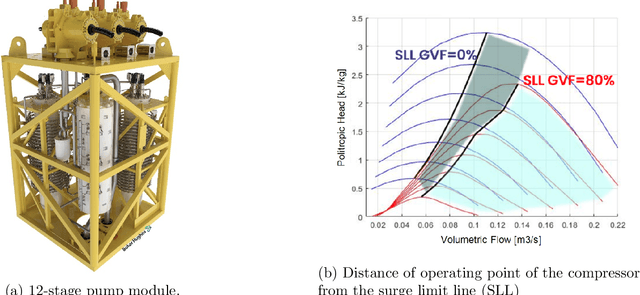

Due to the high cost and reliability of sensors, the designers of a pump reduce the needed number of sensors for the estimation of the feasible operating point as much as possible. The major challenge to obtain a good estimation is the low amount of data available. Using this amount of data, the performance of the estimation method is not enough to satisfy the client requests. To solve this problem of scarcity of data, getting high quality data is important to obtain a good estimation. Based on these considerations, we develop an active learning framework for estimating the operating point of a Modular Multi Pump used in energy field. In particular we focus on the estimation of the surge distance. We apply Active learning to estimate the surge distance with minimal dataset. Results report that active learning is a valuable technique also for real application.
Constrained Exploration and Recovery from Experience Shaping
Sep 21, 2018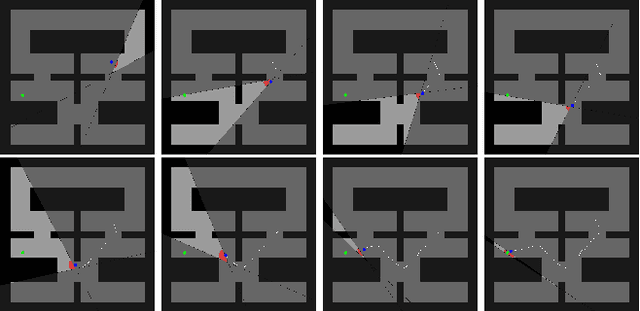

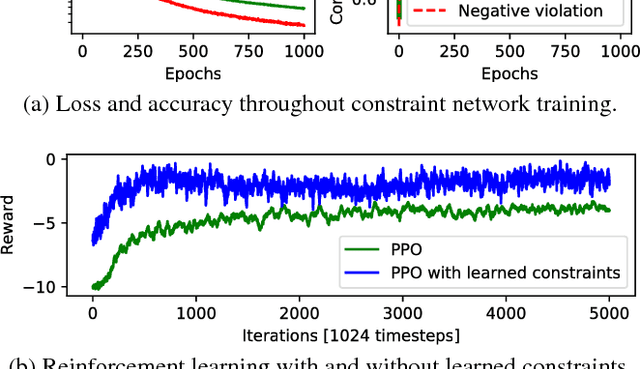
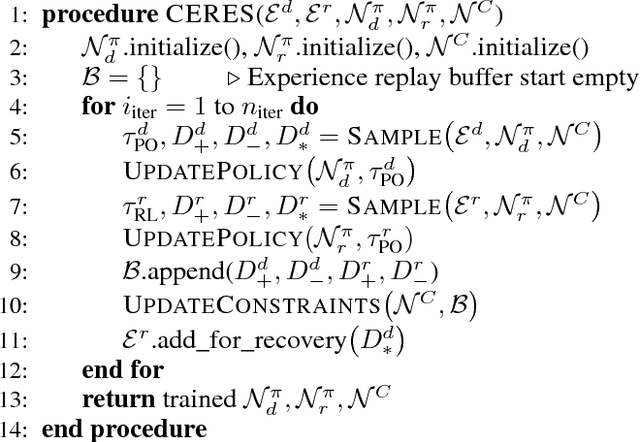
We consider the problem of reinforcement learning under safety requirements, in which an agent is trained to complete a given task, typically formalized as the maximization of a reward signal over time, while concurrently avoiding undesirable actions or states, associated to lower rewards, or penalties. The construction and balancing of different reward components can be difficult in the presence of multiple objectives, yet is crucial for producing a satisfying policy. For example, in reaching a target while avoiding obstacles, low collision penalties can lead to reckless movements while high penalties can discourage exploration. To circumvent this limitation, we examine the effect of past actions in terms of safety to estimate which are acceptable or should be avoided in the future. We then actively reshape the action space of the agent during reinforcement learning, so that reward-driven exploration is constrained within safety limits. We propose an algorithm enabling the learning of such safety constraints in parallel with reinforcement learning and demonstrate its effectiveness in terms of both task completion and training time.
Deep Learning with Predictive Control for Human Motion Tracking
Aug 07, 2018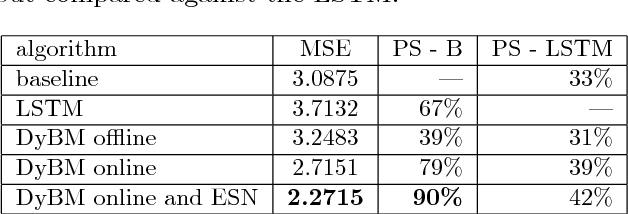
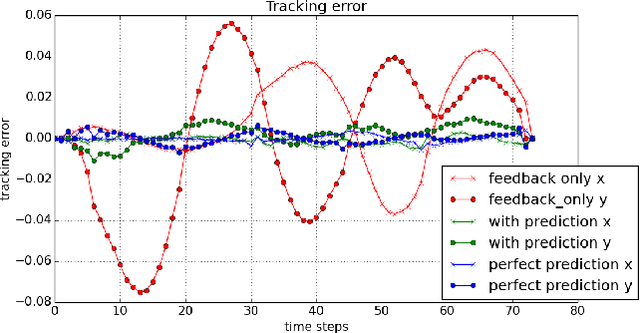
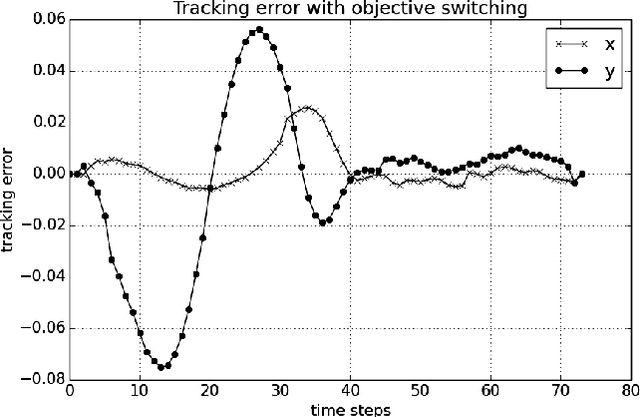
We propose to combine model predictive control with deep learning for the task of accurate human motion tracking with a robot. We design the MPC to allow switching between the learned and a conservative prediction. We also explored online learning with a DyBM model. We applied this method to human handwriting motion tracking with a UR-5 robot. The results show that the framework significantly improves tracking performance.
Experimental Force-Torque Dataset for Robot Learning of Multi-Shape Insertion
Jul 25, 2018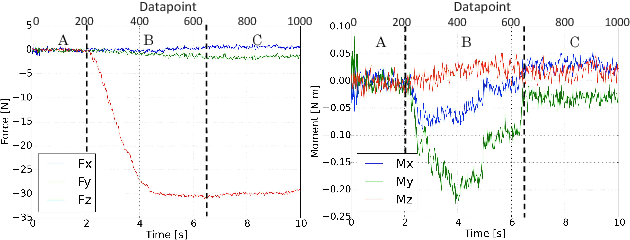
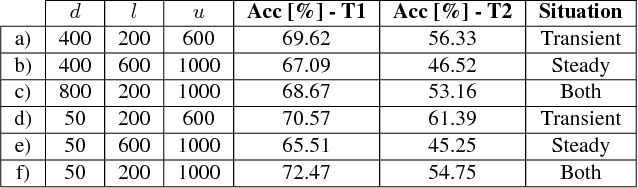
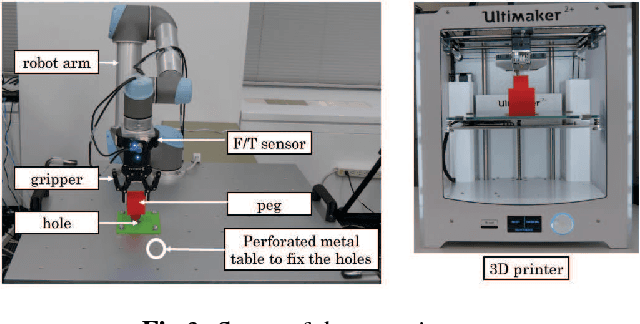
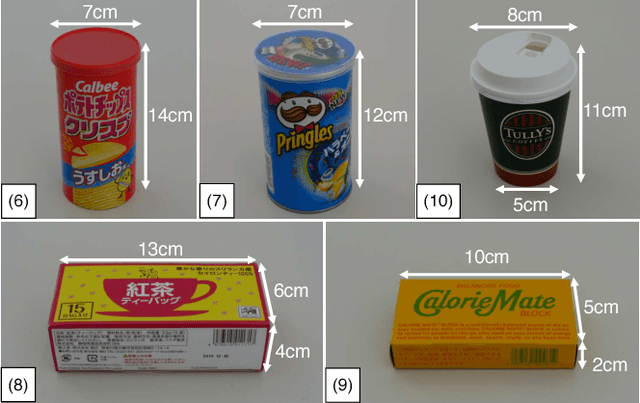
The accurate modeling of real-world systems and physical interactions is a common challenge towards the resolution of robotics tasks. Machine learning approaches have demonstrated significant results in the modeling of complex systems (e.g., articulated robot structures, cable stretch, fluid dynamics), or to learn robotics tasks (e.g., grasping, reaching) from raw sensor measurements without explicit programming, using reinforcement learning. However, a common bottleneck in machine learning techniques resides in the availability of suitable data. While many vision-based datasets have been released in the recent years, ones involving physical interactions, of particular interest for the robotic community, have been scarcer. In this paper, we present a public dataset on peg-in-hole insertion tasks containing force-torque and pose information for multiple variations of convex-shaped pegs. We demonstrate how this dataset can be used to train a robot to insert polyhedral pegs into holes using only 6-axis force/torque sensor measurements as inputs, as well as other tasks involving contact such as shape recognition.
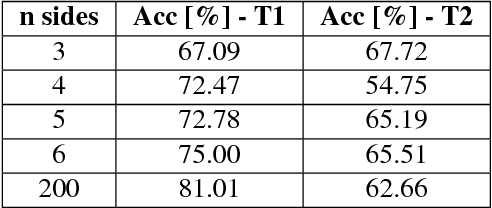
Transfer Learning From Synthetic To Real Images Using Variational Autoencoders For Precise Position Detection
Jul 04, 2018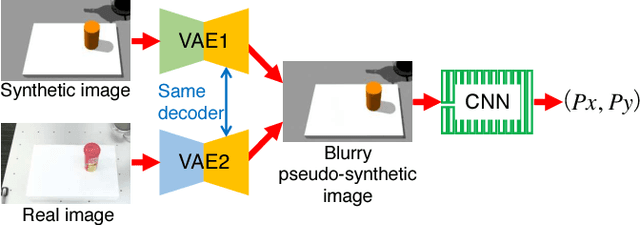
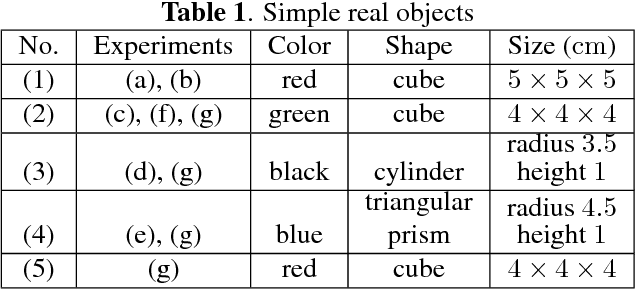
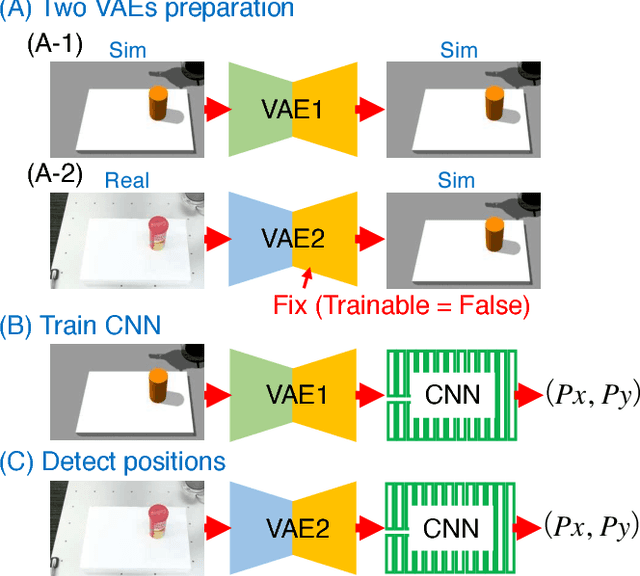
Capturing and labeling camera images in the real world is an expensive task, whereas synthesizing labeled images in a simulation environment is easy for collecting large-scale image data. However, learning from only synthetic images may not achieve the desired performance in the real world due to a gap between synthetic and real images. We propose a method that transfers learned detection of an object position from a simulation environment to the real world. This method uses only a significantly limited dataset of real images while leveraging a large dataset of synthetic images using variational autoencoders. Additionally, the proposed method consistently performed well in different lighting conditions, in the presence of other distractor objects, and on different backgrounds. Experimental results showed that it achieved accuracy of 1.5mm to 3.5mm on average. Furthermore, we showed how the method can be used in a real-world scenario like a "pick-and-place" robotic task.
Focusing on What is Relevant: Time-Series Learning and Understanding using Attention
Jun 22, 2018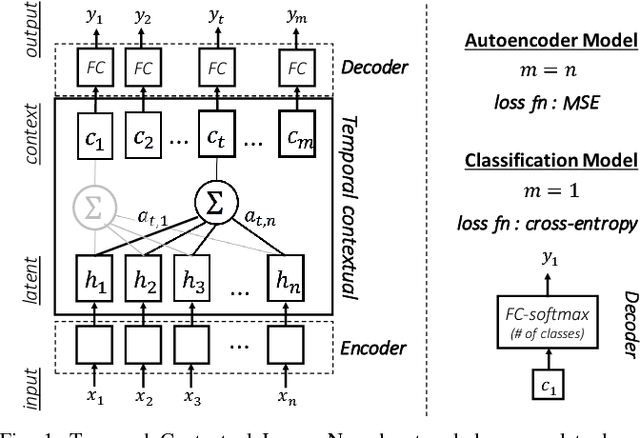
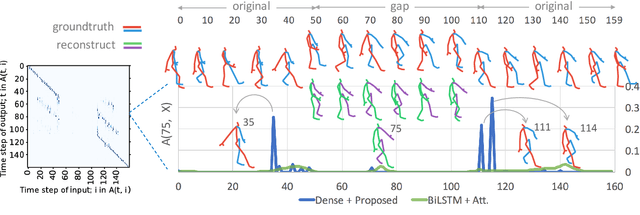
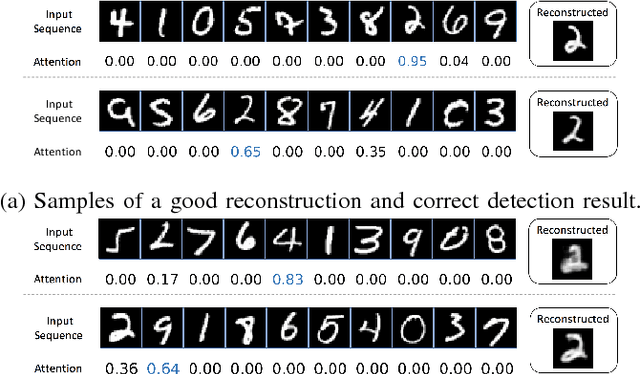
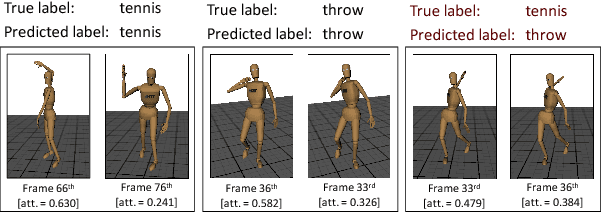
This paper is a contribution towards interpretability of the deep learning models in different applications of time-series. We propose a temporal attention layer that is capable of selecting the relevant information to perform various tasks, including data completion, key-frame detection and classification. The method uses the whole input sequence to calculate an attention value for each time step. This results in more focused attention values and more plausible visualisation than previous methods. We apply the proposed method to three different tasks. Experimental results show that the proposed network produces comparable results to a state of the art. In addition, the network provides better interpretability of the decision, that is, it generates more significant attention weight to related frames compared to similar techniques attempted in the past.
MaestROB: A Robotics Framework for Integrated Orchestration of Low-Level Control and High-Level Reasoning
Jun 03, 2018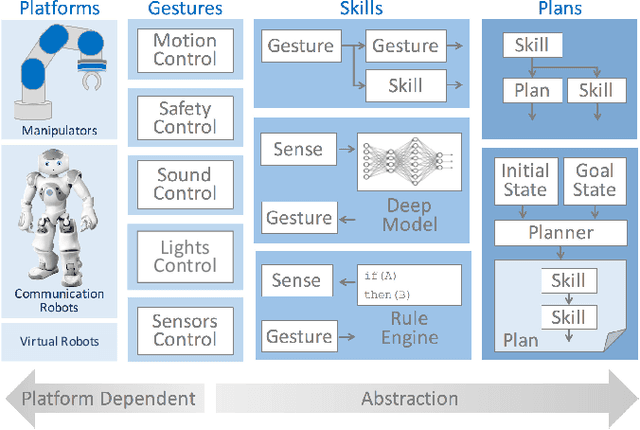
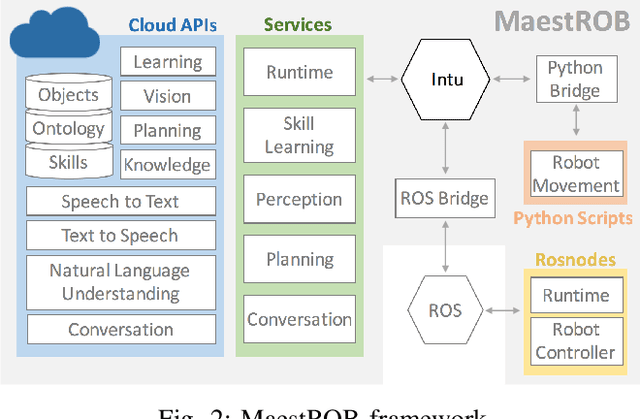
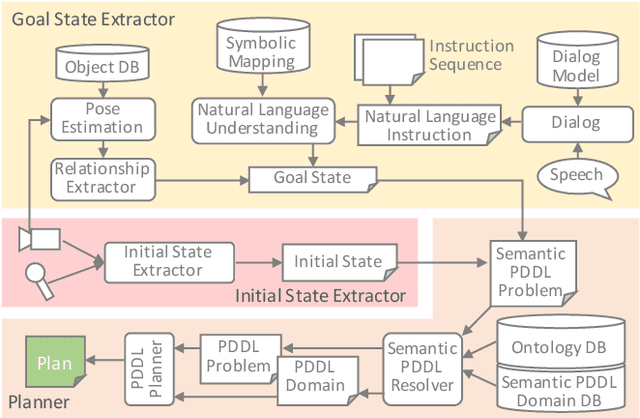
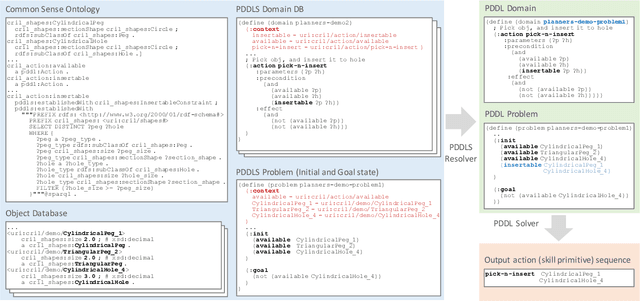
This paper describes a framework called MaestROB. It is designed to make the robots perform complex tasks with high precision by simple high-level instructions given by natural language or demonstration. To realize this, it handles a hierarchical structure by using the knowledge stored in the forms of ontology and rules for bridging among different levels of instructions. Accordingly, the framework has multiple layers of processing components; perception and actuation control at the low level, symbolic planner and Watson APIs for cognitive capabilities and semantic understanding, and orchestration of these components by a new open source robot middleware called Project Intu at its core. We show how this framework can be used in a complex scenario where multiple actors (human, a communication robot, and an industrial robot) collaborate to perform a common industrial task. Human teaches an assembly task to Pepper (a humanoid robot from SoftBank Robotics) using natural language conversation and demonstration. Our framework helps Pepper perceive the human demonstration and generate a sequence of actions for UR5 (collaborative robot arm from Universal Robots), which ultimately performs the assembly (e.g. insertion) task.
OptLayer - Practical Constrained Optimization for Deep Reinforcement Learning in the Real World
Feb 23, 2018


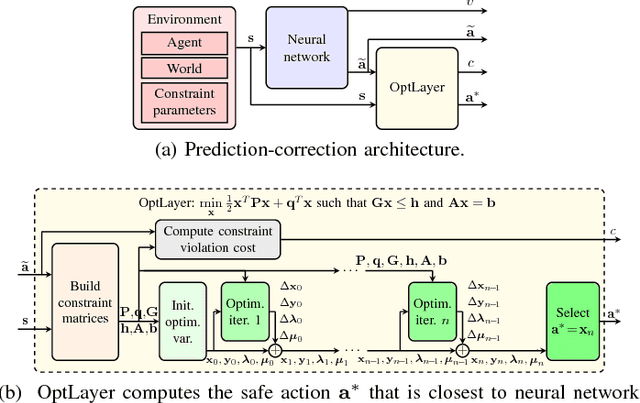
While deep reinforcement learning techniques have recently produced considerable achievements on many decision-making problems, their use in robotics has largely been limited to simulated worlds or restricted motions, since unconstrained trial-and-error interactions in the real world can have undesirable consequences for the robot or its environment. To overcome such limitations, we propose a novel reinforcement learning architecture, OptLayer, that takes as inputs possibly unsafe actions predicted by a neural network and outputs the closest actions that satisfy chosen constraints. While learning control policies often requires carefully crafted rewards and penalties while exploring the range of possible actions, OptLayer ensures that only safe actions are actually executed and unsafe predictions are penalized during training. We demonstrate the effectiveness of our approach on robot reaching tasks, both simulated and in the real world.