 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Temporal Interpolation of Radar-based Precipitation
Mar 01, 2022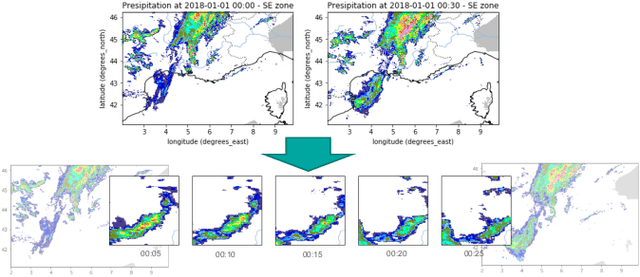
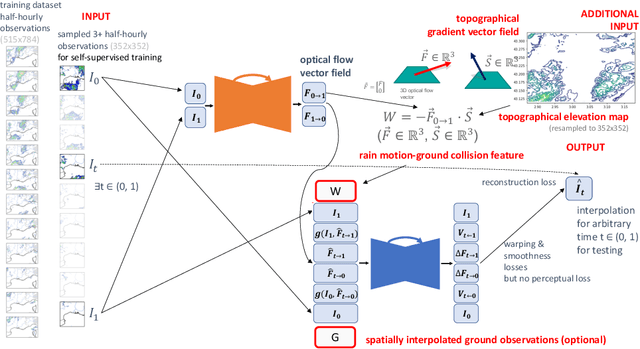
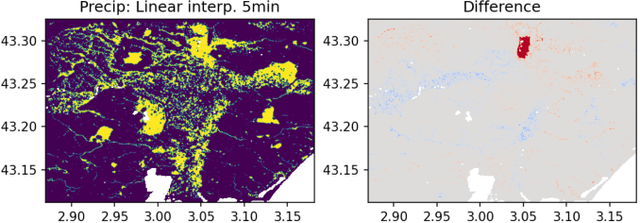
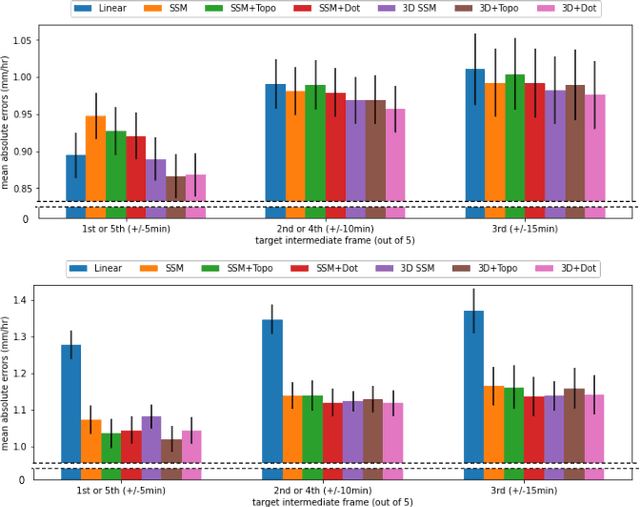
When providing the boundary conditions for hydrological flood models and estimating the associated risk, interpolating precipitation at very high temporal resolutions (e.g. 5 minutes) is essential not to miss the cause of flooding in local regions. In this paper, we study optical flow-based interpolation of globally available weather radar images from satellites. The proposed approach uses deep neural networks for the interpolation of multiple video frames, while terrain information is combined with temporarily coarse-grained precipitation radar observation as inputs for self-supervised training. An experiment with the Meteonet radar precipitation dataset for the flood risk simulation in Aude, a department in Southern France (2018), demonstrated the advantage of the proposed method over a linear interpolation baseline, with up to 20% error reduction.
Design and Implementation of Linked Planning Domain Definition Language
Dec 17, 2019
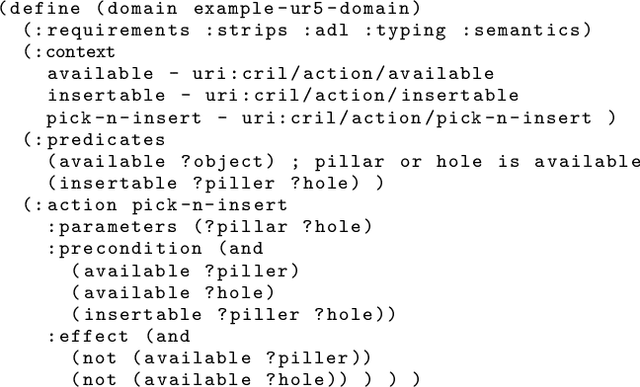
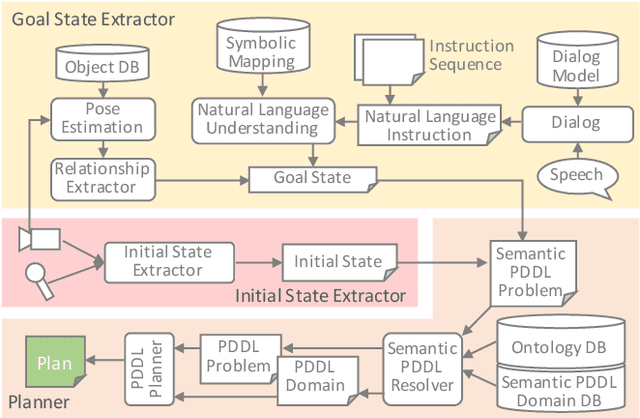
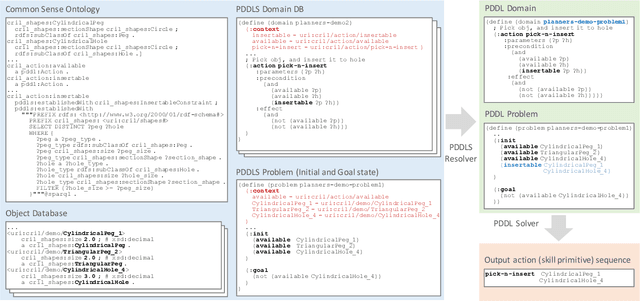
Planning is a critical component of any artificial intelligence system that concerns the realization of strategies or action sequences typically for intelligent agents and autonomous robots. Given predefined parameterized actions, a planning service should accept a query with the goal and initial state to give a solution with a sequence of actions applied to environmental objects. This paper addresses the problem by providing a repository of actions generically applicable to various environmental objects based on Semantic Web technologies. Ontologies are used for asserting constraints in common sense as well as for resolving compatibilities between actions and states. Constraints are defined using Web standards such as SPARQL and SHACL to allow conditional predicates. We demonstrate the usefulness of the proposed planning domain description language with our robotics applications.
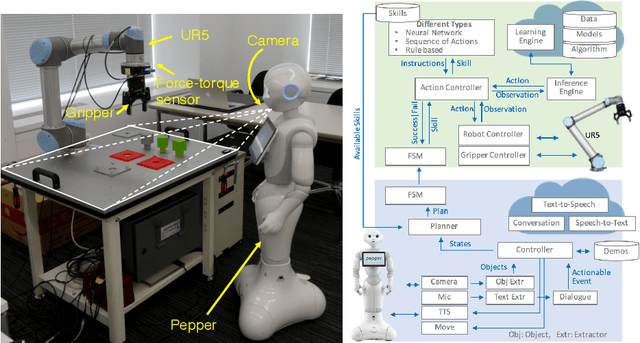
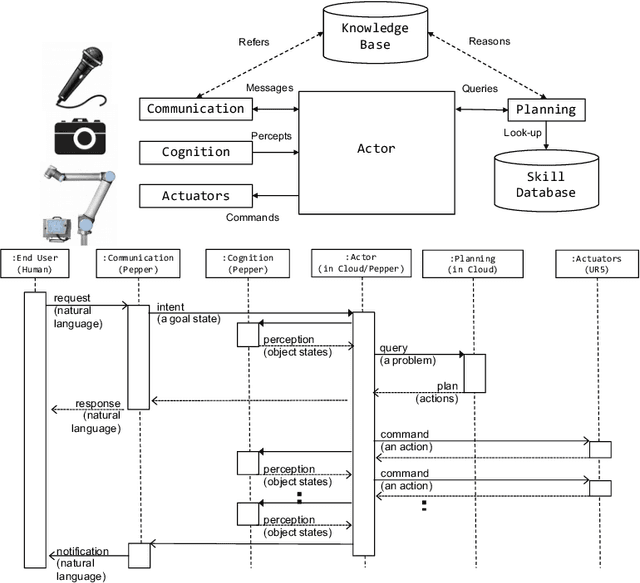
MaestROB: A Robotics Framework for Integrated Orchestration of Low-Level Control and High-Level Reasoning
Jun 03, 2018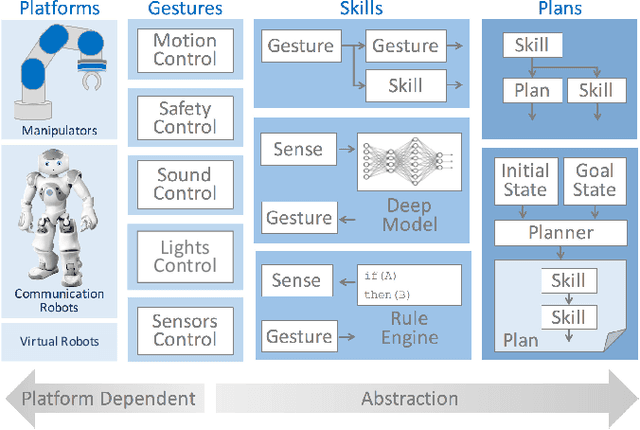
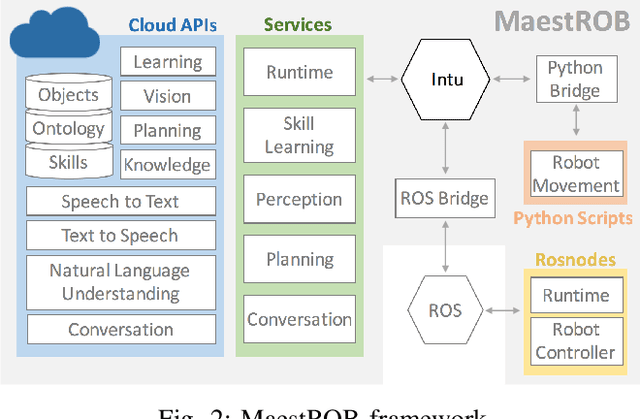
This paper describes a framework called MaestROB. It is designed to make the robots perform complex tasks with high precision by simple high-level instructions given by natural language or demonstration. To realize this, it handles a hierarchical structure by using the knowledge stored in the forms of ontology and rules for bridging among different levels of instructions. Accordingly, the framework has multiple layers of processing components; perception and actuation control at the low level, symbolic planner and Watson APIs for cognitive capabilities and semantic understanding, and orchestration of these components by a new open source robot middleware called Project Intu at its core. We show how this framework can be used in a complex scenario where multiple actors (human, a communication robot, and an industrial robot) collaborate to perform a common industrial task. Human teaches an assembly task to Pepper (a humanoid robot from SoftBank Robotics) using natural language conversation and demonstration. Our framework helps Pepper perceive the human demonstration and generate a sequence of actions for UR5 (collaborative robot arm from Universal Robots), which ultimately performs the assembly (e.g. insertion) task.